

 Подавляющее большинство электродвигателей является электродвигателями вращательного движения. В то же время многие рабочие органы производственных машин должны по технологии своей работы осуществлять поступательное (например, конвейеры, транспортеры и др.) или возвратно-поступательное движение (механизмы подачи станков, манипуляторы, поршневые и другие машины).
Подавляющее большинство электродвигателей является электродвигателями вращательного движения. В то же время многие рабочие органы производственных машин должны по технологии своей работы осуществлять поступательное (например, конвейеры, транспортеры и др.) или возвратно-поступательное движение (механизмы подачи станков, манипуляторы, поршневые и другие машины).
Преобразование вращательного движения в поступательное осуществляется посредством специальных кинематических звеньев: винт-гайка, шарико-винтовая передача, шестерня-зубчатая рейка, кривошипно-шатунная передача и другие.
Естественным для конструкторов рабочих машин является желание использовать для привода рабочих органов, совершающих поступательное и возвратно-поступательное движение, двигателей, ротор которых движется линейно.
В настоящее время получают развитие электроприводы, использующие линейные асинхронные, вентильные и шаговые двигатели. Принципиально линейный двигатель любого типа может быть образован из двигателя вращательного движения путем линейной развертки цилиндрического статора в плоскость.
Представление об устройстве линейного асинхронного двигателя можно получить, если развернуть статор асинхронного двигателя в плоскость. При этом вектор намагничивающих сил статора будет линейно перемещаться вдоль развертки статора, т.е. при этом образуется не вращающееся (как в обычных двигателях), а бегущее электромагнитное поле статора.
В качестве вторичного элемента может использоваться ферромагнитная полоса, располагаемая с небольшим воздушным зазором вдоль развертки статора. Эта полоса играет роль короткозамкнутого ротора. Вторичный элемент увлекается движущимся полем статора и линейно перемещается со скоростью, меньшей скорости движения поля статора на величину линейного абсолютного скольжения.
Линейная скорость бегущего электромагнитного поля будет
где τ, м - полюсное деление - расстояние между соседними полюсами линейного асинхронного двигателя.
Скорость вторичного элемента

где sЛ - относительное линейное скольжение.
При питании двигателя напряжением стандартной частоты получаемые скорости поля будут достаточно велики (более 3 м/с), что затрудняет использование этих двигателей для привода промышленных механизмов. Такие двигатели применяются для высокоскоростных транспортных механизмов. Для получения более низких скоростей движения и регулирования скорости линейного асинхронного двигателя его обмотки питают от преобразователя частоты.
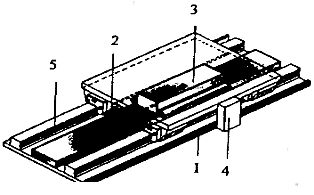
Рис. 1. Конструкция линейного однокоординатного двигателя.
Применяются несколько вариантов конструкций линейного асинхронного двигателя. Одна из них показана на рис. 1. Здесь вторичный элемент (2) - полоса, соединенный с рабочим органом, перемещается по направляющим 1 под действием бегущего электромагнитного поля, создаваемого статором 3. Такая конструкция удобна для компоновки с рабочей машинной, однако, она сопряжена со значительными потоками рассеяния поля статора, вследствие чего cosφ двигателя будет низким.
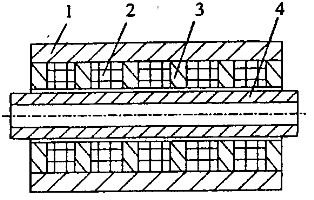
Рис.2. Линейный двигатель цилиндрической конструкции
Для увеличения электромагнитной связи между статором и вторичным элементом, последний размещают в прорезь между двумя статорами, либо конструкция двигателя выполняется в виде цилиндра (см. рис. 2). В этом случае статор двигателя представляет собой трубку (1), внутри которой расположены цилиндрические наборные катушки (2), являющиеся обмоткой статора. Между катушками размещены ферромагнитные шайбы 3, являющиеся частью магнитопровода. Вторичный элемент - шток трубчатой формы также выполнен из ферромагнитного материала.
Линейные асинхронные двигатели могут также иметь обращенную конструкцию, когда вторичный элемент неподвижен, а перемещается статор. Такие двигатели обычно применяются на транспортных средствах. В этом случае в качестве вторичного элемента используется рельс или специальная полоса, а статор размещается на подвижной тележке.
Недостатком линейных асинхронных двигателей является низкий к.п.д и связанные с этим потери энергии, прежде всего, во вторичном элементе (потери скольжения).
В последнее время кроме асинхронных начали применяться синхронные (вентильные) двигатели. Конструкция линейного двигателя такого типа аналогична представленной на рис. 1. Статор двигателя развернут в плоскость, а на вторичном элементе размещаются постоянные магниты. Возможен вариант обращенной конструкции, когда статор является подвижной частью, а вторичный элемент с постоянными магнитами неподвижен. Переключение обмоток статора производится в зависимости от относительного положения магнитов. С этой целью в конструкции предусмотрен датчик положения (4 - на рис. 1).
Для позиционных приводов эффективно применяются также линейные шаговые двигатели. Если развернуть в плоскость статор шагового двигателя, а вторичный элемент выполнить в виде пластины, на которой путем фрезерования канавок образованы зубцы, то при соответствующем переключении обмоток статора вторичный элемент будет совершать дискретное движение, шаг которого может быть весьма малым - до долей миллиметра. Часто применяется обращенная конструкция, в которой вторичный элемент неподвижен.
Скорость линейного шагового двигателя определяется величиной зубцового деления τ, числом фаз m и частотой переключения

Получение высоких скоростей движения не вызывает трудностей, поскольку увеличение зубцового деления и частоты не лимитируется технологическими факторами. Ограничения существуют для минимального значения τ, т.к. отношение зубцового деления к величине зазора между статором и вторичным элементом должно быть не меньше 10.

Использование дискретного привода позволяет не только упростить конструкцию механизмов, совершающих линейное однокоординатное движение, но и дает возможность с помощью одного привода получить двух или многокоординатное движение. Если на статоре подвижной части расположить ортогонально две системы обмоток, а во вторичном элементе выполнить канавки в двух перпендикулярных направлениях, то подвижный элемент будет совершать дискретное движение в двух координатах, т.е. обеспечивать перемещение на плоскости.
В этом случае возникает задача создания опоры для подвижного элемента. Для ее решения может использоваться воздушная подушка — напор воздуха, подаваемого в пространстве под подвижным элементам. Линейные шаговые двигатели развивают относительно низкое тяговое усилие и имеют низкий к.п.д. Основной областью их применения являются легкие манипуляторы, легкие сборочные станки, измерительные машины, станки для лазерной резки и другие устройства.