

 Несмотря на значительное конструктивное разнообразие конвейеров, при выборе электропривода они могут быть объединены в одну характерную группу. Прежде всего следует отметить, что по технологическим условиям эти механизмы обычно не требуют регулирования скорости.
Несмотря на значительное конструктивное разнообразие конвейеров, при выборе электропривода они могут быть объединены в одну характерную группу. Прежде всего следует отметить, что по технологическим условиям эти механизмы обычно не требуют регулирования скорости.
Лишь на некоторых конвейерах для изменения темпа работы применяется неглубокое регулирование скорости в пределах 2:1. Двигатели конвейеров работают в различных условиях окружающей среды, во многих случаях в запыленных, влажных помещениях с высокой или низкой температурой, на открытом воздухе, в цехах с агрессивной средой и т. д.
Характерной особенностью конвейеров является большой статический момент сопротивления покоя, который, как правило, превосходит номинальный вследствие различных причин, в том числе и застывания смазки в трущихся деталях. Таким образом, к электроприводу конвейеров предъявляются требования высокой надежности, простоты обслуживания, а также обеспечения повышенного момента при пуске.
В некоторых случаях возникают дополнительные требования по обеспечению плавного пуска, предотвращению пробуксовывания ленты, небольшому регулированию скорости и согласованному вращению нескольких электроприводов. Всем этим требованиям в достаточной степени удовлетворяют асинхронные двигатели с короткозамкнутым или с фазным ротором.
Выбор мощности приводного двигателя конвейера производится методом постепенного приближения совместно с расчетом и выбором всего механического оборудования. Первый этап расчета заключается в ориентировочном определении тягового усилия и натяжения, по которым производятся предварительный выбор мощности двигателя и выбор механического оборудования. На втором этапе расчета строится уточненный график зависимости натяжения с учетом потерь от длины конвейера. После построения графика выбираются места установки электропривода, двигатель и механическое оборудование проверяются по полученным усилию и натяжению.
Известно большое количество формул для ориентировочного определения тягового усилия и натяжения конвейера, предложенных на основе опыта проектирования и эксплуатации конвейеров. Одна из них имеет следующий вид:

где Т — натяжение конвейера, Н; F — усилие, которое должен преодолевать электродвигатель, Н; T0 — предварительное натяжение, Н; Fп — усилие, обусловленное подъемом груза, Н; ΔF—суммарное усилие, вызванное силами трения на участках трассы конвейера, Н.
По усилию и натяжению в тяговом органе конвейера производится предварительный выбор двигателя и механического оборудования. Формулы для подсчета потерь в барабанах, звездочках, блоках и других элементах оборудования могут быть найдены в специальной литературе по механической части конвейеров.
Для построения диаграммы тяговых усилий вычерчивается трасса конвейера со всеми подъемами и спусками, перегибами, приводными и натяжными станциями, направляющими блоками и барабанами. Затем, если следовать от наименее нагруженного участка конвейера, производится учет потерь в каждом элементе и получается натяжение тягового органа по всей длине. На рис. 1 приведены диаграммы тяговых усилий ленточного и цепного конвейеров с однодвигательным электроприводом.
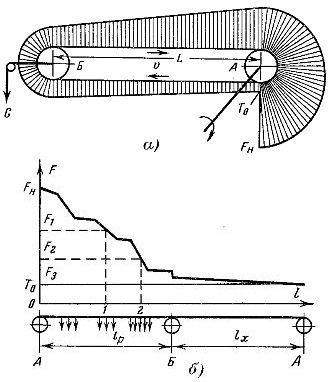
Рис. 1. Диаграмма тяговых усилий в ленточном (а) и цепном (б) конвейерах: а — приводная станция; б — натяжная станция.
Мощность приводного двигателя конвейера определяется по формуле
здесь Р— мощность двигателя, кВт; FH — усилие на набегающем участке тягового органа, Н; v — скорость перемещения тягового органа, м/с; η — к. п. д. приводного механизма.
При проектировании ленточных конвейеров после построения диаграммы тяговых усилий определяется место установки приводной станции на трассе конвейера. Электропривод конвейеров большой протяженности, например крупных поточно-транспортных систем, нецелесообразно осуществлять одним двигателем, так как в этом случае в механическом оборудовании, расположенном близко к приводной станции, создаются значительные усилия.
Перегрузка указанных участков конвейера приводит к тому, что габариты механической части и особенно тягового органа резко возрастают. Для предотвращения возникновения больших тяговых усилий конвейеры приводятся в движение от нескольких приводных станций. В таком случае в тяговом органе приводной станции создается усилие, пропорциональное статическому сопротивлению только одного участка, и тяговый орган не передает усилий для привода всего конвейера.
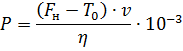
При наличии на ленточном конвейере нескольких приводных станций место их установки выбирается по диаграмме тяговых усилий таким образом, чтобы тяговое усилие двигателей нескольких станций примерно равнялось усилию однодвигательного электропривода (рис. 2).
Рис. 2. Диаграмма тяговых усилий ленточного конвейера: а — при однодвигательном электроприводе; б — при многодвигательном электроприводе.
Следует, однако, учесть, что для окончательного выбора мощности двигателя приводной станции необходимо построить уточненную диаграмму тяговых усилий для каждой ветви. Это уточнение вызвано тем обстоятельством, что сумма усилий всех участков может быть не равна усилию при однодвигательном приводе, что определяется уменьшением сечения тягового органа и соответственно снижением потерь на трение при многодвигательном приводе.
Отметим, что для крупных ленточных конвейеров, где мощности двигателей достигают десятков и сотен киловатт, протяженность трассы между приводными станциями чаще всего составляет примерно 100—200 м. Следует учитывать, что конструктивное встраивание приводных станций в конвейер связано с известными трудностями, особенно для ленточных конвейеров. Поэтому наиболее удобными местами установки их являются концевые точки трассы. На некоторых предприятиях протяженность несекционированных конвейеров достигает 1000—1500 м.
Установка нескольких приводных станций на ленточном конвейере приводит, как правило, к повышению эксплуатационных показателей многодвигательного электропривода по сравнению с одиночным. Определяется это тем, что, например, при пуске конвейера вхолостую может работать один двигатель.
С увеличением нагрузки включается второй двигатель, а затем последующие. При снижении нагрузки возможно частичное отключение двигателей. Указанные переключения приводят к снижению времени работы двигателей с малой загрузкой и повышению их эксплуатационных показателей. В случае завалов конвейеров транспортируемыми материалами, увеличения статического момента за счет застывания смазки и т. д. возможен совместный пуск всех двигателей для создания повышенного пускового момента.
Большое значение при выборе системы управления электроприводом ленточных конвейеров имеет правильный расчет упругих деформаций тягового органа и ускорений, которые могут возникнуть в переходных процессах. Обратимся к рис. 3, где изображены графики изменения скорости при пуске двигателя на набегающей 1 и сбегающей 2 ветвях ленты. Конвейер приводится в движение асинхронным короткозамкнутым двигателем, статический момент на валу двигателя принят постоянным.
Характер изменения скорости в ветвях 1 и 2 конвейера будет в значительной степени зависеть от протяженности ленты. При малой длине конвейеров, около нескольких десятков метров, графики изменения скорости ветвей 1 и 2 во времени будут близки друг другу (рис. 3, а). Естественно при этом, что ветвь 2 начнет двигаться с некоторым отставанием по отношению к ветви 1 за счет упругой деформации ленты, однако скорости ветвей довольно быстро выравниваются, правда, с некоторыми колебаниями.
Несколько иначе обстоит дело при пуске ленточных конвейеров большой протяженности, около сотен метров. В этом случае трогание с места сбегающей ветви 2 конвейера может начаться после того, как приводной двигатель достигнет установившейся скорости (рис. 3, б). На ленточных конвейерах большой протяженности можно наблюдать отставание начала движения участков ленты на расстоянии 70—100 м от набегающей ветви при установившейся скорости двигателя. При этом в ленте создается дополнительное упругое натяжение, а тяговое усилие к последующим участкам ленты прикладывается рывком.
По мере достижения всеми участками конвейера установившейся скорости снижается упругое натяжение ленты. Возврат запасенной энергии может привести к возрастанию скорости ленты по сравнению с установившейся и к ее колебаниям (рис. 3, б). Такой характер переходного процесса в тяговом органе крайне нежелателен, так как следствием его является повышенный износ ленты, а в некоторых случаях ее разрыв.
Указанные обстоятельства приводят к тому, что в отношении характера пуска и других переходных процессов в электроприводе ленточных конвейеров выдвигаются жесткие требования по ограничению ускорений системы. Удовлетворение их приводит к некоторому усложнению электропривода: появляются многоступенчатые панели управления асинхронными двигателями с фазным ротором, дополнительные нагрузочные, пусковые устройства и т. д.
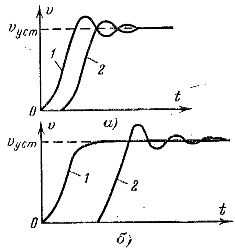
Рис. 3. Диаграммы скорости различных участков ленточного конвейера при пуске.
Самым простым способом ограничения ускорений в электроприводе ленточных конвейеров при пуске является реостатное управление (рис. 4, а). Переход с одной пусковой характеристики на другую обеспечивает плавное ускорение системы. Такое решение задачи часто применяется на ленточных конвейерах, однако оно приводит к значительному увеличению габаритов панелей управления и пусковых реостатов.
В некоторых случаях более целесообразно ограничение ускорения системы электропривода осуществлять путем дополнительного торможения вала двигателя в процессе пуска, так как создание дополнительного тормозного момента МТ снижает динамический момент (рис. 4, б). Как видно из приведенных графиков, ускорение системы искусственно снижается за счет подтормаживания, вследствие чего снижаются колебания скорости в набегающей и сбегающей ветвях конвейера. По окончании пуска источник дополнительного тормозного момента должен быть отключен от вала двигателя.
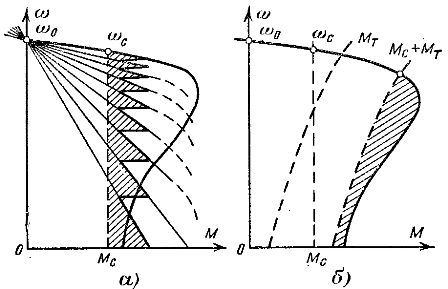
Рис. 4. К способам пуска ленточных конвейеров.
Отметим попутно, что ограничение ускорений в системе электропривода может быть достигнуто путем использования обоих способов одновременно, например реостатного пуска с подключением источника дополнительного тормозного момента. Такой метод находит применение на протяженных односекционных конвейерах, где стоимость ленты определяет основную долю капитальных затрат всей установки.
Плавный пуск системы с созданием искусственной нагрузки на валу практически осуществляется при помощи обычных колодочных тормозов с электрическим или гидравлическим управлением, подсоединения к валу двигателя индукционных или фрикционных муфт, использования дополнительных тормозных машин и т. д. Системы реостатного регулирования асинхронных двигателей иногда дополняются тиристорными или дроссельными регуляторами напряжения в статорной цепи.
Отметим также, что задача ограничения ускорений в ленте конвейера может быть достигнута и другими способами, например применением системы двухдвигательного привода с поворотным статором, системы с многоскоростным короткозамкнутым двигателем, асинхронным электроприводом с тиристорным управлением в цепи ротора двигателя и т. д.
Следует отметить, что приводной двигатель цепных конвейеров должен располагаться, как правило, после участка с наибольшей нагрузкой, т. е. участка трассы с большим количеством грузов и крутых подъемов и перегибов.
Обычно на основе этой рекомендации двигатель располагается в наивысшей точке подъема. При установке привода следует учесть, что участки трассы с большим количеством изгибов должны иметь по возможности небольшое натяжение: это приводит к уменьшению потерь на криволинейной части трассы.

Определение мощности приводного двигателя цепного конвейера производится также на основании построения диаграммы тяговых усилий по всей трассе (см. рис. 1, б).
Зная в соответствии с диаграммой предварительное натяжение и усилие на набегающем участке тягового органа, а также скорость движения, по формуле можно рассчитать мощность электропривода.
Цепные конвейеры, несмотря на значительную протяженность трасс, вследствие относительно малых скоростей движения, например на машиностроительных заводах, работают чаще всего с одним приводным двигателем сравнительно небольшой мощности (несколько киловатт). Однако на тех же заводах встречаются более мощные конвейерные установки с цепными тяговыми органами, где используется несколько приводных двигателей. Такая система электропривода имеет ряд характерных особенностей.
При многодвигательном приводе цепного конвейера роторы двигателей в установившемся режиме будут иметь одинаковую скорость, так как они механически связаны тяговым органом. В переходных режимах скорости роторов могут несколько различаться за счет упругих деформаций тягового органа.
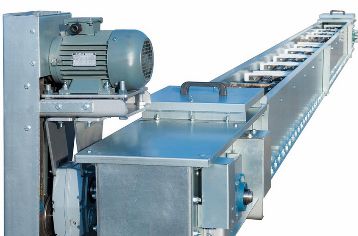
Вследствие наличия механической связи между роторами машин многодвигательного конвейера в тяговом органе возникают дополнительные натяжения, обусловленные разными нагрузками ветвей. Природа этих натяжений может быть выяснена на основании рассмотрения схемы конвейера, приведенной на рис. 5. При одинаковой загрузке ветвей конвейера все четыре двигателя, в том случае если их характеристики одинаковы, будут иметь равные скорости и нагрузку.
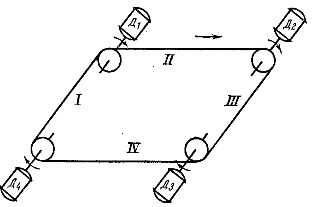
Рис. 5. Схема многодвигательного конвейера.
Увеличение нагрузки на ветвь I приведет к тому, что в первую очередь упадет скорость двигателя Д1 а скорость двигателей Д2, Д3 и Д4 останется постоянной. Таким образом, двигатель Д2 будет вращаться со скоростью, большей, чем у двигателя Д1 и создаст дополнительное натяжение в ветви II, а затем и I.
Натяжение ветви II повлечет за собой некоторую разгрузку двигателя Д1 и увеличение его скорости. Такая же картина будет иметь место и в ветви II, так как двигатель Д3 возьмет на себя часть нагрузки ветви II конвейера. Постепенно скорости и нагрузки двигателей выравниваются, но в тяговом органе создается дополнительное натяжение.
При выборе многодвигательного привода цепного конвейера диаграмма тяговых усилий строится таким же способом, как и при одном двигателе. Электропривод должен обеспечить максимальное тяговое усилие, которое необходимо для преодоления сопротивления движению конвейера. На рис. 1, б приведена диаграмма тяговых усилий в тяговом органе конвейера, по которой можно наметить место установки приводных станций.
Если задаться, например, условием, что число приводных станций равно трем и все двигатели должны обеспечить одинаковые тяговые усилия, то двигатели следует установить в месте, характеризующемся точкой 0, и соответственно на расстоянии 0—1 и 0—2 от него (рис. 6, а). Во время работы конвейера в случае полного совпадения механических характеристик двигателей каждый из них создает примерно одинаковое тяговое усилие (Fn — Т0)/3.
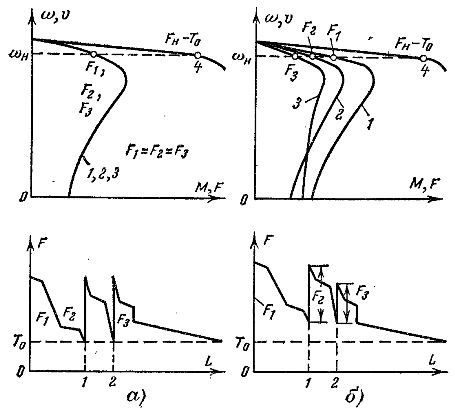
Рис. 6. Графики распределения нагрузки в тяговом органе цепного конвейера.
Применение многодвигательных приводов на цепных конвейерах значительно уменьшает нагрузку тягового органа, вследствие чего механическое оборудование может быть выбрано более легким. Оптимальное количество приводных станций на конвейере выбирается путем технико-экономического сравнения вариантов, которое учитывает одновременно стоимость электропривода и механического оборудования.
В том случае, когда характеристики двигателей несколько неодинаковы, каждая машина может создать тяговое усилие, отличающееся от расчетного. На рис. 6, а приведены механические характеристики трех двигателей одинаковой мощности, имеющих одинаковые параметры, а на рис. 6, б— характеристики двигателей, имеющих разные параметры. Усилия, которые будут создавать двигатели, находятся путем построения суммарной характеристики 4.
Так как роторы всех двигателей конвейера жестко связаны тяговым органом, то их скорость соответствует скорости движения цепи, а суммарное усилие равно (Fa — Т0). Тяговое усилие каждого двигателя легко получить, проведя горизонтальную прямую, соответствующую номинальной скорости и пересекающую характеристики 1, 2, 3 и 4.
На рис. 6, а и б, кроме механических характеристик двигателей, приведены диаграммы тяговых усилий. В тяговом органе при разных характеристиках двигателей может, создаться дополнительное натяжение, обусловленное разностью тяговых усилий, развиваемых двигателями конвейера.
При выборе двигателей приводных станций конвейера следует проверять их характеристики и по возможности добиваться полного их совпадения. Исходя из этих условий, целесообразно применять асинхронные двигатели с фазным ротором, где соответствие характеристик может быть получено введением дополнительных сопротивлений в роторную цепь.
На рис. 7 приведены механические характеристики двухдвигательного электропривода конвейера. Характеристики 1 и 2 являются естественными, соответственно характеристики 1' и 2' получены при введенном в цепь ротора двигателя дополнительном сопротивлении. Суммарный момент и тяговое усилие, развиваемые двигателями, будут одинаковыми как при жестких 1, 2, так и при мягких 1', 2' характеристиках. Однако нагрузка между двигателями при мягких характеристиках распределяется более благоприятно.
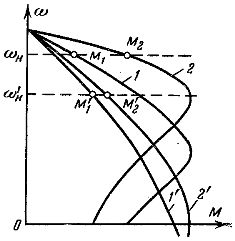
Рис. 7. Распределение нагрузки между двигателями конвейера при различной жесткости их характеристик.
При проектировании механического оборудования следует учесть, что скорость конвейера при смягчении характеристик двигателей снижается и для сохранения постоянной номинальной скорости конвейера необходимо изменить передаточное отношение редукторов. Практически целесообразным является введение в роторную цепь двигателей конвейера дополнительного сопротивления не более 30% номинального сопротивления ротора. Мощность двигателя в этом случае следует увеличить примерно в 1/(1 —s) раз. Когда на конвейере устанавливаются асинхронные двигатели с короткозамкнутым ротором, их следует выбирать с повышенным скольжением.