

Подавляющая часть вырабатываемой электрической энергии преобразуется в механическую посредством электрического привода для обеспечения работы различных машин и механизмов.
Одной из важных задач электропривода является определение необходимого закона изменения момента М двигателя при известной нагрузке и требуемом характере движения, задаваемом законом изменения ускорения или скорости. Эта задача сводится к синтезу системы электропривода, обеспечивающей заданный закон движения.
В общем случае знаки моментов М (вращающий момент двигателя) и Мс (момент сил сопротивления), могут быть различными.
Например, при одинаковых знаках М и Мс привод работает в двигательном режиме с возрастанием скорости w (угловое ускорение e > 0). В этом случае вращение привода происходит в сторону приложения момента М двигателя, который может действовать в любом из двух возможных направлений (по часовой стрелке или против нее).
Одно из этих направлений, например по часовой стрелке, принимают за положительное, и при вращении привода в этом направлении момент М и скорость w считают положительными. В системе координат момента и скорости (М, w) такой режим работы будет расположен в I квадранте.
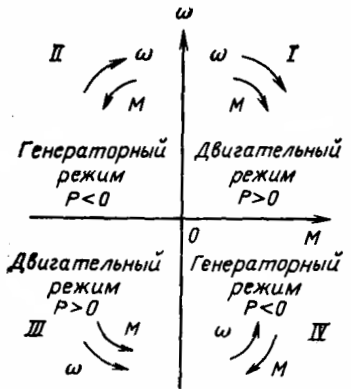
Области режимов работы электропривода в координатах скорости w и момента М
Если при неподвижном приводе изменить направление действия вращающего момента М, то знак его станет отрицательным, а величина e (угловое ускорение привода) < 0. При этом абсолютная величина скорости w возрастает, но знак ее отрицательный, т. е. происходит разгон привода в двигательном режиме при вращении против часовой стрелки. Этот режим будет расположен в III квадранте.
Направление статического момента Мс (или его знак) зависит от вида сил сопротивления, действующих на рабочий орган, и направления вращения.

Статический момент создается силами полезных и вредных сопротивлении. Полезными являются силы сопротивления, для преодоления которых предназначена машина. Их величина и характер зависят от вида производственного процесса и конструкции машины.
Вредные силы сопротивления обусловлены различными видами потерь, возникающих в механизмах при движении, и при их преодолении машина не совершает никакой полезной работы.
Основной причиной этих потерь являются силы трения в подшипниках, передачах и т. п., которые всегда препятствуют движению при любом его направлении. Поэтому при изменении знака скорости со изменяется знак статического момента Мс, обусловленного указанными силами сопротивления.
Такие статические моменты называют реактивными или пассивными, так как они всегда препятствуют движению, но под их воздействием при отключенном двигателе движение не может возникнуть.
Реактивными могут быть и статические моменты, создаваемые силами полезного сопротивления, если работа машины связана с преодолением сил трения, резания или растяжения, сжатия и скручивания неупругих тел.
Однако если производственный процесс, выполняемый машиной, связан с изменением потенциальной энергии элементов системы (подъем груза, упругие деформации скручивания, сжатия и т. п.), то создаваемые полезными силами сопротивления статические моменты называют потенциальными или активными.
Направление действия их остается постоянным, и знак статического момента Мс при изменении знака скорости о не меняется. В этом случае при увеличении потенциальной энергии системы статический момент препятствует движению (например, при подъемегруза), а при уменьшении — способствует движению (спуск груза) даже при отключенном двигателе.
Если электромагнитный момент М и скорость о направлены встречно, то электрическая машина работает в тормозном режиме, что соответствует II и IV квадрантам. В зависимости от соотношения абсолютных значений М и Мс скорость вращения привода при этом может возрастать, уменьшаться или оставаться постоянной.

Назначение электрической машины, используемой в качестве приводного двигателя, заключается в сообщении рабочей машине механической энергии для выполнения работы или в торможении рабочей машины (пример - Выбор электропривода конвейеров).
В первом случае электрическая энергия, подведенная к электрической машине, преобразуется в механическую, и на валу машины создается вращающий момент, обеспечивающий вращение привода и выполнение полезной работы производственным агрегатом.
Такой режим работы электропривода называется двигательным. Вращающий момент и скорость двигателя при этом совпадают по направлению, и мощность на валу двигателя Р = Мw > 0.
Характеристики двигателя в этом режиме работы могут находиться в I или III квадранте, где знаки скорости и момента одинаковы, а следовательно, Р > 0. Выбор знака скорости при известном направлении вращения двигателя (правое или левое) может быть произвольным.
Обычно за положительное направление скорости принимают направление вращения привода, при котором механизм выполняет основную работу (например, подъем груза подъемной машиной). Тогда работа электропривода в противоположном направлении происходит с отрицательным знаком скорости.
Чтобы снизить скорость или остановить машину, двигатель может быть отключен от сети. В этом случае уменьшение скорости будет происходить под действием сил сопротивления движению.
Такой режим работы называется свободным выбегом. В этом случае при любой скорости вращающий момент привода равен нулю, т. е. механическая характеристика двигателя совпадает с осью ординат.
Для более быстрого, чем при свободном выбеге, снижения скорости или остановки, а также для поддержания неизменной скорости механизма при моменте нагрузки, действующем в сторону вращения, направление момента электрической машины должно быть противоположным направлению скорости.
Такой режим работы привода называется тормозным, а электрическая машина при этом работает в генераторном режиме.
Мощность привода Р = Мw < 0, и механическая энергия от рабочей машины подводится к валу электрической машины и преобразуется в электрическую энергию. Механические характеристики при генераторном режиме располагаются во II и IV квадрантах.
Поведение электропривода, как следует из уравнении движения, при заданных параметрах механических элементов определяется величинами моментов двигателя и нагрузки на валу рабочего органа.
Так как наиболее часто анализируется закон изменения скорости электропривода в процессе работы, то для электроприводов, у которых вращающий момент двигателя и момент нагрузки зависят от скорости, удобно использовать графический метод.
С этой целью обычно применяют механическую характеристику двигателя, представляющую зависимость угловой скорости двигателя от его вращающего момента w = f(M), и механическую характеристику механизма, устанавливающую зависимость скорости двигателя от приведенного статического момента, создаваемого нагрузкой на рабочем органе w = f(Mc).
Указанные зависимости для установившегося режима работы электропривода называют статическими механическими характеристиками.

Статические механические характеристики электродвигателей