

 При проектировании электропривода электродвигатель должен выбираться так, чтобы его механические характеристики соответствовали механическим характеристикам производственного механизма. Механические характеристики дают взаимосвязь переменных в установившихся режимах.
При проектировании электропривода электродвигатель должен выбираться так, чтобы его механические характеристики соответствовали механическим характеристикам производственного механизма. Механические характеристики дают взаимосвязь переменных в установившихся режимах.
Механической характеристикой механизма называют зависимость между угловой скоростью и моментом сопротивления механизма, приведенными к валу двигателя) ω = f(Mс).
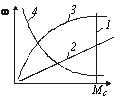
Рис. 1. Механические характеристики механизмов
Среди всего многообразия выделяют несколько характерных типов механических характеристик механизмов:
1. Характеристика с моментом сопротивления, не зависящим от скорости (прямая 1 на рис. 1). Независимая от скорости механическая характеристика графически изображается прямой, параллельной оси вращения, в данном случае вертикалью. Такой характеристикой обладают, например, подъемные краны, лебедки, поршневые насосы при неизменной высоте подачи и др.
2. Характеристика с моментом сопротивления линейно зависящим от скорости (прямая 2 на рис. 1). Такая зависимость присуща, например, приводу генератора постоянного тока с независимым возбуждением, работающему на постоянную нагрузку.
3. Характеристика с нелинейным возрастанием момента (кривая 3 на рис. 1). Типичными примерами емогут служить характеристики вентиляторов, центробежных насосов, гребных винтов. Для этих механизмов момент Мс зависит от квадрата угловой скорости ω. Это т.н. параболичская (вентиляторная) механическая характеристика.
4. Характеристика с нелинейно спадающим моментом сопротивления (кривая 4 на рис. 1). Здесь момент сопротивления обратно пропорционален скорости вращения. Мощность в этом случае остается постоянной на всем диапазоне рабочей скорости механизма. Например, у механизмов главного движения некоторых металлорежущих станков (токарных, фрезерных, расточных) момент Мс изменяется обратно пропорционально ω, а мощность потребляемая механизмом, остается постоянной.
Механической характеристикой электродвигателя называется зависимость его угловой скорости от вращающего момента ωд = f(M).Здесь следует иметь ввиду, что момент М на валу двигателя независимо от направления вращения имеет положительный знак - момент движущий. Вместе с тем момент сопротивления Мс имеет знак отрицательный.
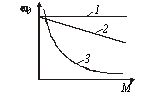
В качестве примеров на рис. 2 приведены механические характеристики: 1 - синхронного двигателя; 2 – двигателя постоянного тока независимого возбуждения; 3 – двигателя постоянного тока последовательного возбуждения.
Для оценки свойств механических характеристик электропривода используют понятие жесткости характеристики. Жесткость механической характеристики определяется по выражению
β = dМ /dω
где dМ – изменение момента двигателя; dωд – соответствующее изменение угловой скорости.
Для линейных характеристик значение β остается постоянным, для нелинейных – зависит от рабочей точки.
Используя это понятие, характеристики, приведенные на рис. 2, можно качественно оценить так: 1 – абсолютно жесткая (β = ∞); 2 – жесткая; 3 – мягкая.
Абсолютно жесткая характеристика - скорость вращения двигателя остается неизменной при изменении нагрузки двигателя в пределах от нуля для номинальной. Такой характеристикой обладают синхронные двигатели.
Жесткая характеристика - скорость вращения меняется незначительно при изменении нагрузки от нуля до номинальной. Такой характеристикой обладает двигатель постоянного тока с параллельным возбуждением, а также асинхронный двигатель в области линейной части характеристики.
Жесткой характеристикой принято считать такую, у которой изменение скорости не превышает приблизительно 10% номинальной скорости при изменении нагрузки от нуля до номинальной.
Мягкая характеристика - скорость вращения двигателя меняется значительно при сравнительно небольших изменениях нагрузки. Такой характеристикой обладает двигатель постоянного тока с последовательным, смешанным или с параллельным возбуждением, но с добавочным сопротивлением в цепи якоря, а также асинхронный с сопротивлением в цепи ротора.
Для большинства производственных механизмов используют асинхронные двигатели с короткозамкнутым ротором, имеющие жесткую механическую характеристику.
Все механические характеристики электродвигателей делятся на естественные и искусственные.
Естественная механическая характеристика относится к условиям работы двигателя с номинальными значениями параметров.
Например, для двигателя с параллельным возбуждением естественная характеристика может быть построена для случая, когда напряжение на якоре и ток возбуждения имеют номинальные значения, а в цепи якоря отсутствует добавочное сопротивление.
Естественная характеристика асинхронного двигателя соответствует номинальному напряжению и номинальной частоте переменного тока, подводимого к статору двигателя при условия отсутствия добавочного сопротивления в цепи ротора.
Таким образом, для каждого двигателя естественная характеристика может быть построена только одна, а искусственных - неограниченное количество. Например, каждому новому значению сопротивления якоря двигателя постоянного тока или в цепи ротора асинхронного двигателя отвечает своя механическая характеристика.
