

 Узлы схем автоматизации составлены на основе опыта проектирования, наладки и эксплуатации оборудования металлургических заводов и могут быть распространены на другие отрасли промышленности. Автоматизация процессов управления электроприводами технологических механизмов строится в функции положения (пути), скорости, времени, давления, температуры и других величин, характеризующих технологический процесс.
Узлы схем автоматизации составлены на основе опыта проектирования, наладки и эксплуатации оборудования металлургических заводов и могут быть распространены на другие отрасли промышленности. Автоматизация процессов управления электроприводами технологических механизмов строится в функции положения (пути), скорости, времени, давления, температуры и других величин, характеризующих технологический процесс.
Датчиками этих величин являются:
-
путевые выключатели,
-
фотореле,
-
емкостные и индукционные приборы, определяющие положение механизма или перемещаемого тела,
-
приборы времени,
-
контактные манометры и т. п.
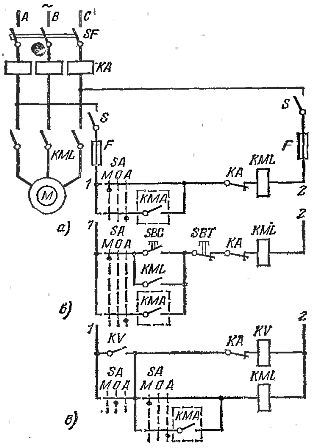
Рис. 1. Схемы ручного и автоматического нереверсивного управления асинхронным двигателем с к. з. ротором: а — без минимальной защиты, б — с минимальной защитой при ручном управлении, в — с минимальной защитой при ручном и автоматическом управлении, КМА — контакт автоматического сигнала.
Силовые цепи управления двигателями, показанные в качестве примера на рис. 1 и 2, в остальных схемах не приводятся.
Для аппарата ручного (неавтоматического) управления применен термин «ключ», выполненный в виде командоконтроллера, командоаппарата, универсального переключателя или другого аппарата аналогичного действия.
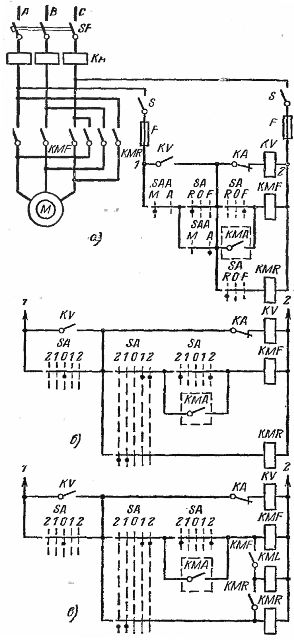
Рис. 2. Схемы ручного и автоматического реверсивного управления асинхронным двигателем. Автоматическое управление только «вперед»: а — схема с избирателем SAA ручной и автоматической работы, ручное управление ключом SA отключает цепь автоматики, б и в — схемы с ключом без избирателя, автоматическая работа при первом положении ключа, КМА — контакт автоматического сигнала.
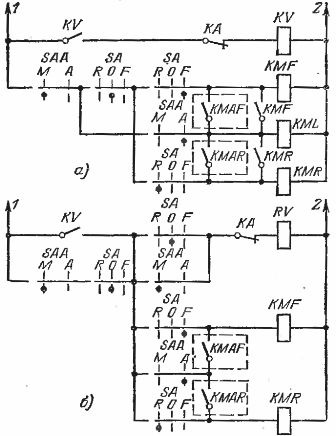
Рис. 3. Схемы ручного и автоматического реверсивного управления приводом с применением избирателя: а — при автоматической работе ручное управление ключом SA отключает цепи автоматики и работа привода корректируется оператором, б — при автоматической работе перевод ключа SA из нулевого положения останавливает привод, KMAF и KMAR — контакторы автоматических сигналов «вперед» и «назад».
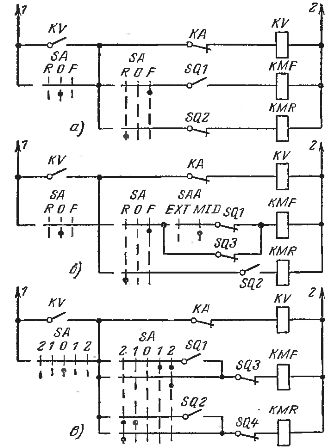
Рис. 4. Схемы ручного и автоматического реверсивного управления приводом: а — автоматическое управление осуществляется при включенном контакторе КМА, схема позволяет во время автоматической работы перейти на ручное управление с полным исключением автоматики, б— автоматическое управление осуществляется на положении ключа 1, на положении ключа 2 возможна ручная корректировка работы привода, KMAF и KMAR — контакты автоматических сигналов «вперед» и «назад».
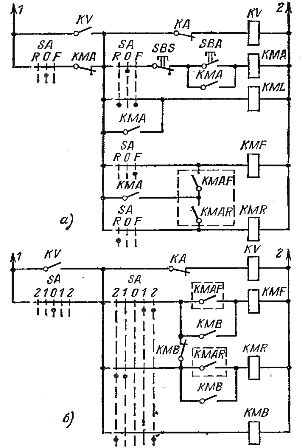
Рис. 5. Схемы автоматической остановки привода: а — в крайних положениях рабочего элемента, б — в крайних положениях и в промежуточном положении «вперед» (SAA в положении MID), в — в крайних и промежуточных положениях «вперед» и «назад».
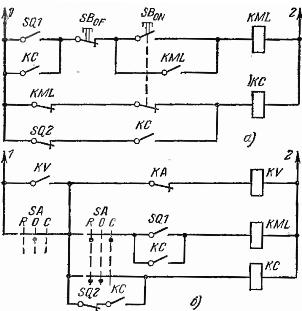
Рис. 6. Схемы цикличной работы нереверсивного электропривода с применение двух шайб путевого выключателя: а —управление кнопкой, б — управление ключом.
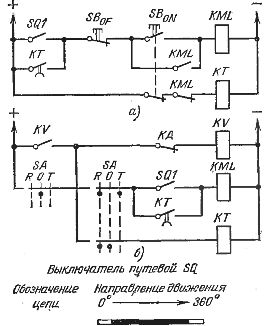
Рис. 7. Схемы цикличной работы нереверсивного электропривода с применением одной шайбы путевого выключателя и реле времени (выдержка времени минимальная только для перекрытия контакта 1 путевого выключателя): а — управление кнопкой, б — управление ключом.
В схемах приняты обозначения контакторов:
-
KML — линейный,
-
KMF — вперед,
-
KMR — назад,
-
KMD — динамического торможения,
-
КМА — автоматики,
-
КМВ — блокировочный.
Обозначения реле:
-
КТ — времени,
-
КА — максимального тока,
-
KB, КF, KR — блокировочное,
-
КС — цикличное,
-
SQ — путевой выключатель.
В электроприводах механизмов широко применяют узлы схем автоматического управления: автопуск, автостоп, цикличная работа, автоматическое возвратно-поступательное бесконечное движение или их сочетание.
Автопуск привода может быть произведен от датчика или аппаратов других приводов в определенном, заранее заданном положении механизма.
Автостоп привода может производиться в крайних и промежуточных положениях или для эксцентрических механизмов после поворота эксцентрика на 180 или 360°. Автореверс может служить для возврата механизма или для непрерывной работы механизма с возвратно-поступательным или вращательным движением.
На рис. 8 —10 даны схемы с избирателем для перевода на ручное или автоматическое управление и без избирателя. В схемах с избирателем при автоматической работе ключ стоит в нулевом положении и им можно вмешиваться в автоматическую работу.
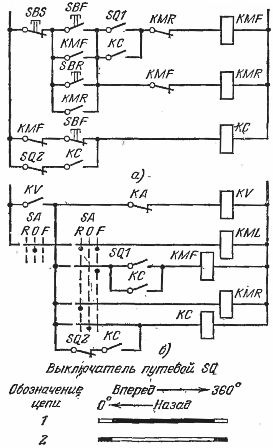
Рис. 8. Схемы цикличной работы реверсивного электропривода с применением двух шайб путевого выключателя («вперед» — цикличная работа, «назад» — непрерывная работа): а — управление кнопкой, б — управление ключом.
В схемах без избирателя первое положение ключа используется для ручного управления, а второе — для автоматического, или наоборот. Хотя схемы автоматической работы с избирателем имеют больше элементов, по своей гибкости они предпочтительнее схем без избирателя. В качестве избирателя, как правило, применяют универсальный переключатель или переключатель кулачковый универсальный, которые имеют достаточное количество контактов, необходимых для выполнения сложных схем.
Выбор аппаратов ручного управления производится, исходя из частоты включения механизмов. Для часто работающих механизмов (свыше 100 включений в час) применяют командоконтроллеры, ладонные кнопки с коротким ходом и ножные кнопки. Для механизмов с числом включений до 100 в час применяют универсальные переключатели. Для длительно работающих механизмов применяют кнопочные станции, универсальные переключатели и переключатели кулачковые универсальные.
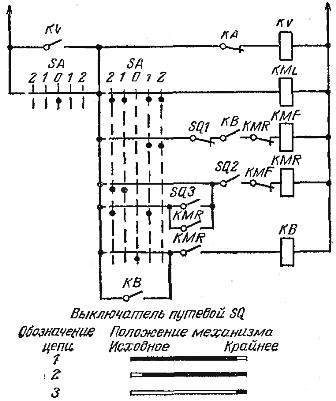
Рис. 9. Схема управления с автоматическим реверсом для возврата рабочего элемента в исходное положение.
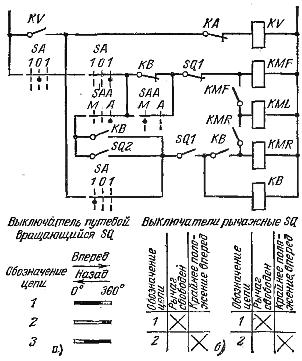
Рис. 10. Схема автоматического возвратно-поступательного бесконечного движения: а — вращающимся путевым выключателем, б — двумя рычажными путевыми выключателями. Обозначение SQ1 в цепи катушки контактора KMR дано для рычажных путевых выключателей, для вращающегося SQ цепь будет иметь обозначение SQ3.