

Частота вращения ротора, при которой работает асинхронный электродвигатель, зависит от частоты питающего напряжения, от мощности текущей нагрузки на валу, и от числа электромагнитных полюсов данного двигателя. Эта реальная частота вращения (или рабочая частота) всегда меньше так называемой синхронной частоты, которая определяется лишь параметрами источника питания и количеством полюсов обмотки статора данного асинхронного двигателя.
Таким образом, синхронная частота вращения двигателя — это частота вращения магнитного поля обмотки статора при номинальной частоте питающего напряжения, и она несколько отличается от рабочей частоты. В итоге количество оборотов в минуту под нагрузкой всегда меньше так называемых синхронных оборотов.
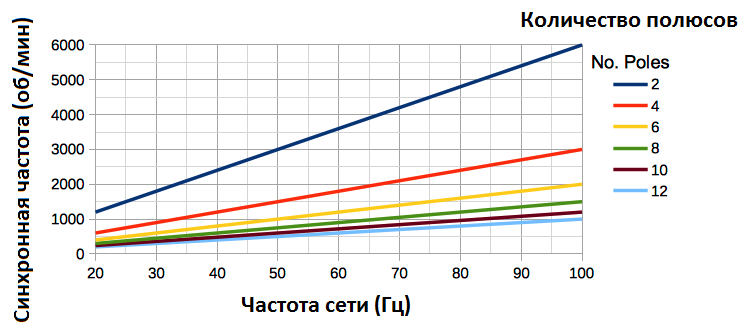
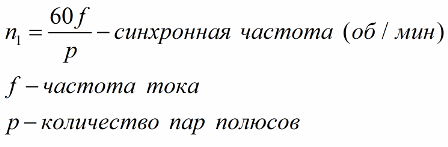
На приведенном рисунке видно, как синхронная частота вращения для асинхронного двигателя с тем или иным количеством полюсов статора зависит от частоты питающего напряжения: чем выше частота — тем выше угловая скорость вращения магнитного поля. Так например в частотно-регулируемых приводах меняя частоту питающего напряжения изменяют синхронную частоту двигателя. При этом изменяется и рабочая частота вращения ротора двигателя под нагрузкой.
Обычно обмотку статора асинхронного двигателя питают трехфазным переменным током, который и создает вращающееся магнитное поле. И чем больше пар полюсов — тем меньшей будет синхронная частота вращения — частота вращения магнитного поля статора.
Большинство современных асинхронных двигателей имеют от 1 до 3 пар магнитных полюсов, в редких случаях 4, ведь чем больше полюсов — тем ниже КПД асинхронного двигателя. Однако при меньшем количестве полюсов скорость вращения ротора можно менять очень-очень плавно, изменяя частоту питающего напряжения.
Как уже было отмечено выше, реальная рабочая частота асинхронного двигателя отличается от его синхронной частоты. Почему так происходит? Когда ротор вращается с частотой меньшей чем синхронная, то проводники ротора пересекают магнитное поле статора с некоторой скоростью и в них наводится ЭДС. Эта ЭДС создает токи в замкнутых проводниках ротора, в результате данные токи взаимодействуют с вращающимся магнитным полем статора, и возникает крутящий момент — ротор увлекается магнитным полем статора.

Если момент имеет достаточную величину чтобы преодолеть силы трения, то ротор начинает вращаться, при этом момент электромагнитный равен тормозящему моменту, который создают нагрузка, силы трения и т. д.
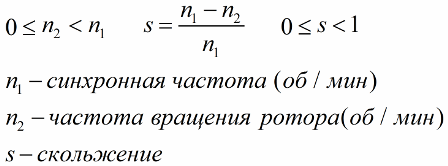
При этом ротор все время отстает от магнитного поля статора, не может рабочая частота достичь синхронной частоты, так как если бы это произошло, то в проводниках ротора перестала бы наводиться ЭДС, и вращающий момент просто не появится. В итоге, для двигательного режима вводят величину «скольжение» (скольжение s, как правило, составляет 2-8%), в связи с чем справедливо и следующее неравенство двигателя:
Но если ротор того же асинхронного двигателя раскрутить при помощи какого-нибудь внешнего привода, например двигателем внутреннего сгорания, до такой скорости, что частота вращения ротора превысит синхронную частоту, то ЭДС в проводниках ротора и активный ток в них приобретут определенное направление, и асинхронный двигатель превратится в генератор.
Общий электромагнитный момент окажется тормозящим, скольжение s станет отрицательным. Но чтобы генераторный режим смог проявить себя, необходимо поставить асинхронному двигателю реактивную мощность, которая бы создавала магнитное поле статора. В момент старта такой машины в генераторном режиме может хватить остаточной индукции ротора и конденсаторов, которые подключают к трем фазам обмотки статора, питающей активную нагрузку.