

 Механическая характеристика синхронного двигателя имеет вид горизонтальной прямой, т. е. частота вращения его не зависит от нагрузки (рис. 1, а). С увеличением нагрузки возрастает угол θ — угол между векторами напряжения сети Uc и ЭДС обмотки статора Е0 (рис. 1,б).
Механическая характеристика синхронного двигателя имеет вид горизонтальной прямой, т. е. частота вращения его не зависит от нагрузки (рис. 1, а). С увеличением нагрузки возрастает угол θ — угол между векторами напряжения сети Uc и ЭДС обмотки статора Е0 (рис. 1,б).
Из векторной диаграммы можно вывести формулу электромагнитного момента
М = (m1/ω1)(U1Е0/х1)sinθ,
где m1 — число фаз статора; ω1 — угловая скорость поля статора; U1 — напряжение на статоре; Е0 — ЭДС, наведенная в обмотке статора; х1 — индуктивное сопротивление обмотки статора; θ — угол между векторами намагничивающих сил статора и ротора. Из этой формулы следует, что момент изменяется в зависимости от нагрузки по синусоидальному закону (рис. 1, в).
При отсутствии нагрузки угол θ = 0, т. е. напряжение и ЭДС совпадают по фазе. Это означает, что поле статора и поле ротора совпадают по направлению, т. е. пространственный угол между ними равен нулю.
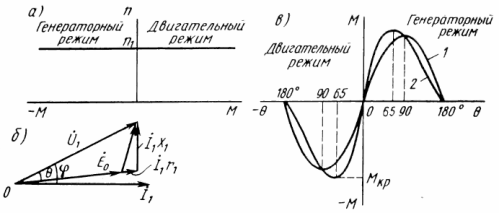
Рис. 1. Характеристики (а, в) и векторная диаграмма (6) синхронного двигателя: I — ток статора; r1 — активное сопротивление обмотки статора; х1 — индуктивное сопротивление, созданное потоком рассеянии и потоком якоря
С увеличением нагрузки момент возрастает и достигает критического максимального значения при θ = 80° (кривая 1), который двигатель в состоянии создать при заданном сетевом напряжении и токе возбуждения.
Обычно номинальное значение угла θном (25 ≈ 30)°, что ниже критического значения в три раза, поэтому перегрузочная способность двигателя Ммакс/Мном = 1,5 + 3. Большее значение относится к двигателям с неявно выраженными полюсами на роторе, а меньшее — с явно выраженными. Во втором случае характеристика (кривая 2) имеет критический момент при θ = 65°, что вызвано влиянием реактивного момента.
Чтобы двигатель не вышел из синхронизма при перегрузках или снижении сетевого напряжения, временно можно увеличить ток возбуждения, т. е. использовать форсированный режим.
При равномерном вращении пусковая обмотка на работу двигателя не влияет. При изменении нагрузки происходит изменение угла θ, что сопровождается увеличением или уменьшением скорости. Тогда пусковая обмотка начинает играть роль стабилизирующей. Возникающий в ней асинхронный момент сглаживает колебания скорости ротора.

Синхронный двигатель характеризуется следующими пусковыми свойствами:
- I*п = Iп//Iном — кратностью пускового тока, протекающею по статору в начальный момент пуска;
- М*п = Мп/Mном — кратностью пускового момента, зависящего от количества стержней пусковой обмотки и от их активного сопротивления;
- М*вх = Мвх/Mном — кратностью входного момента, развиваемого двигателем в асинхронном режиме перед втягиванием в синхронизм при скольжении s = 0,05;
- М*макс = Ммакс/Мной — кратностью максимального момента в синхронном режиме двигателя;
- U*п = Uп • 100/U1 — наименьшим допустимым напряжением на статоре при пуске, %.
Синхронный электропривод применяют в установках, не требующих частых пусков и регулировки скорости, например для вентиляторов, насосов, компрессоров. Синхронный электродвигатель имеет более высокий КПД, чем асинхронный, может работать с перевозбуждением, т. е. с отрицательным углом φ, тем самым компенсируя индуктивную мощность других потребителей.
Хотя синхронный двигатель более сложен по конструкции, требует источника постоянного тока, имеет контактные кольца, тем не менее он оказывается экономически более эффективным, чем асинхронный, особенно для привода мощных механизмов.