

 Синхронные двигатели на промышленных предприятиях используют для привода лесопильных рам, компрессорных и вентиляторных установок и др., двигатели малой мощности применяют в системах автоматики, когда требуется строго постоянная частота вращения. Механическая характеристика синхронного двигателя абсолютно жесткая.
Синхронные двигатели на промышленных предприятиях используют для привода лесопильных рам, компрессорных и вентиляторных установок и др., двигатели малой мощности применяют в системах автоматики, когда требуется строго постоянная частота вращения. Механическая характеристика синхронного двигателя абсолютно жесткая.
Вращающий момент синхронного двигателя зависит от угла 0 между осями полюсов ротора и полем статора и выражается формулой
где Мм - максимальное значение момента.
Зависимость М = f (θ) называется угловой характеристикой синхронной машины (рис. 1). Работа двигателя устойчива на начальном участке угловой характеристики, он работает обычно при θ не более 30 - 35°. При увеличении устойчивость уменьшается, в предельной точке В характеристики (θ = 90о) стабильная работа становится невозможной; момент, соответствующий пределу устойчивости называют максимальным (опрокидывающим) моментом.
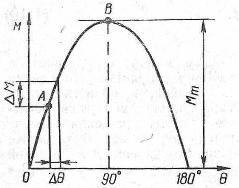
Рис. 1. Угловая характеристика синхронного двигателя
Если синхронный двигатель нагрузить выше Мм, то ротор двигателя выпадет из синхронизма и произойдет его останов, что является для машины аварийным режимом. Номинальный момент двигателя в 2—3 раза меньше опрокидывающего. Вращающий момент двигателя пропорционален напряжению. Синхронные двигатели более чувствительны к колебаниям напряжения, чем асинхронные.
Пусковые свойства синхронного двигателя характеризуются не только кратностью пускового момента, но и величиной входного момента Мвх, развиваемого двигателем при скольжении 5 % от включения постоянного тока в обмотку возбуждения двигателя. Кратность пускового момента 0,8—1,25, а входной момент близок по величине к пусковому моменту синхронного двигателя.
Относительная сложность пуска синхронных двигателей и сравнительно высокая стоимость аппаратуры автоматического управления ограничивают их применение в промышленности.
Если синхронная машина работает вхолостую (угол θ = 0), то векторы напряжения сети U и ЭДС Е0 в обмотке якоря равны и противоположны по фазе. Увеличением тока в обмотке возбуждения полюсов можно создать перевозбуждение в машине. При этом ЭДС Е0 превышает напряжение сети U, в обмотке якоря возникает ток
где Е — результирующая ЭДС; хс — индуктивное сопротивление обмотки якоря (активным сопротивлением обмотки при качественной оценке режима работы машины обычно пренебрегают).
Ток якоря Iя отстает от результирующей ЭДС Е на угол 90°, а по отношению к вектору напряжения сети он является опережающим на 90° (таким же, как при включении в сеть конденсаторов). Машину, работающую с перевозбуждением, можно использовать для компенсации реактивной мощности, такую машину называют синхронным компенсатором.