

Очевидным преимуществом перед асинхронным двигателем, питаемым от частотного преобразователя, является то, что скорость синхронного двигателя точно определяется частотой, а асинхронный двигатель всегда должен работать со скольжением. Точного источника частоты достаточно для точного управления скоростью синхронного двигателя, в то время как обратная связь по скорости необходима для достижения точности асинхронным двигателем.

На практике работа синхронных двигателей с инверторным питанием без обратной связи не так широко распространена, как можно было бы ожидать, хотя она обычно используется в многодвигательных приводах. Тем не менее, замкнутый контур или самосинхронная работа быстро набирают обороты и уже хорошо зарекомендовали себя.
С одной стороны, вместо приводов постоянного тока используются большие синхронные двигатели с возбужденным ротором, особенно там, где требуются высокие скорости или когда двигатель должен работать в опасной среде (например, в большом газовом компрессоре).
На другом конце шкалы находятся небольшие синхронные двигатели с постоянными магнитами, используемые в бесщеточных приводах постоянного тока.
Приводы синхронных двигателей с преобразователем, питаемым в разомкнутом контуре
Этот простой метод подходит для установок с несколькими двигателями, где все двигатели должны работать с одинаковой скоростью.
Отдельные двигатели дороже, чем эквивалентные асинхронные двигатели массового производства, но это компенсируется тем фактом, что не требуется обратная связь по скорости, и все двигатели могут питаться от одного инвертора (частотного преобразователя), как показано на рис. 1.
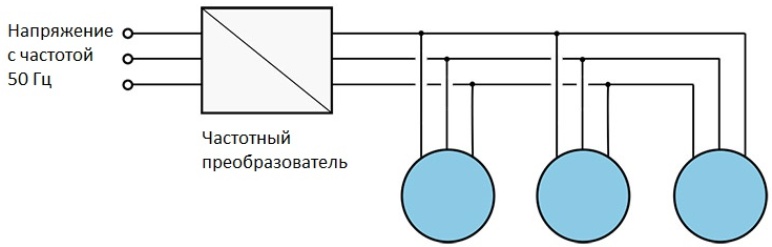
Рис. 1. Работа группы из нескольких синхронных двигателей с питанием от одного частотного преобразователя в разомкнутом контуре
Отношение напряжения к частоте инвертора обычно поддерживается постоянным, чтобы двигатели работали с полным потоком на всех скоростях и, следовательно, имели возможность «постоянного крутящего момента».
Если необходима длительная работа на малых скоростях, может потребоваться улучшение охлаждения двигателей.
Скорость точно определяется частотой привода, но изменения скорости (в том числе запуск из состояния покоя) должны выполняться медленно.
При работе группы из нескольких синхронных двигателей с питанием от одного частотного преобразователя в разомкнутом контуре иногда может возникать проблема, которая заключается в том, что скорость двигателя демонстрирует явные спонтанные колебания.
Частота питания может быть абсолютно постоянной, но частота вращения ротора колеблется вокруг ожидаемого (синхронного) значения, иногда с заметной амплитудой и обычно с низкой частотой, скажем, 1 Гц.
Причина такого нестабильного поведения заключается в том, что двигатель и нагрузка образуют систему как минимум четвертого порядка, и поэтому она может быть очень плохо демпфированной или даже нестабильной при определенных сочетаниях параметров системы.
Факторами, влияющими на стабильность, являются напряжение на клеммах, частота питания, постоянные времени двигателя, инерция и демпфирование нагрузки.
Неустойчивое поведение в собственном смысле слова (т. е. когда колебания неограниченно нарастают) встречается редко, но ограниченная неустойчивость не редкость, особенно на скоростях значительно ниже базовых 50 Гц и в условиях легкой нагрузки.
Очень сложно точно предсказать, когда может произойти нестабильное поведение, и необходимо принять меры против него. Поэтому некоторые преобразователи содержат схемы, которые обнаруживают любую тенденцию к колебаниям тока и модулируют напряжение и частоту для подавления нежелательных колебаний.

Рис. 2. Синхронный двигатель с постоянными магнитами Wolong Electric Group демонстрируется на выставке в городе Ханчжоу в Китае
Самосинхронная (замкнутая) работа
В разомкнутой схеме частота питания двигателя независимо регулируется частотным преобразователем, который не может точно определить, правильно ли ротор заблокирован вращающимся полем, создаваемым статором, и если тяговый момент превышен, двигатель просто останавливается.
Однако в самосинхронном режиме выходная частота инвертора определяется скоростью вращения ротора. В частности, моменты включения и выключения обмотки статора коммутационными устройствами определяются зависимыми от положения ротора сигналами, получаемыми от датчика положения ротора, установленного на валу ротора.
Таким образом, токи статора всегда включаются в нужное время для создания желаемого крутящего момента на роторе, потому что инвертор знает, где находится ротор в любой момент времени.
Использование сигналов обратной связи по положению ротора для управления инвертором объясняет приведенное выше описание «замкнутого контура».
Если ротор замедляется (например, из-за увеличения нагрузки), частота питания статора автоматически снижается, так что ротор остается синхронизированным с вращающимся полем, и поэтому двигатель не может «вырваться», как это происходит в режиме разомкнутого контура.
Различие между работой с обратной связью и без обратной связи может помочь прояснить аналогию с двигателем внутреннего сгорания.
Двигатель всегда работает как замкнутая система в том смысле, что открытие и закрытие впускных и выпускных клапанов автоматически синхронизируется с положением поршней с помощью распределительного вала и зубчатого ремня.
В самосинхронной машине это похоже на то, что переключающие устройства в инверторе включают и выключают ток в зависимости от положения ротора.
Напротив, работа двигателя в разомкнутом контуре означала бы, что мы сняли ремень ГРМ и решили управлять клапанами с отдельным приводом распределительного вала, и в этом случае должно быть ясно, что двигатель сможет производить мощность только на одной скорости при что движение поршней вверх и вниз в точности соответствует открытию и закрытию клапанов.
Оказывается, общие рабочие характеристики самосинхронного двигателя переменного тока очень похожи на характеристики обычного двигателя постоянного тока.
Это действительно неудивительно, если мы понимаем, что в двигателе постоянного тока механический коммутатор меняет направление тока в каждой (вращающейся) обмотке якоря в соответствующей точке, так что, независимо от скорости, ток под каждым (неподвижным) полюсом поля равен всегда в правильном направлении, чтобы создать требуемый крутящий момент.
В самосинхронном двигателе роли статора и ротора меняются местами по сравнению с двигателем постоянного тока.
Поле вращается, а «якорная» обмотка (состоящая из трех отдельных групп катушек или фаз) неподвижна.
Время и направление тока в каждой фазе контролируются переключением инвертора, которое, в свою очередь, определяется датчиком положения ротора. Поэтому, независимо от скорости, крутящий момент всегда в правильном направлении.
Комбинация датчика положения ротора и инвертора выполняет практически ту же функцию, что и коммутатор в обычном двигателе постоянного тока.
Конечно, обычно инвертор должен переключать только три обмотки по сравнению с гораздо большим количеством катушек и сегментов коммутатора, которые должны переключать щетки в двигателе постоянного тока, но в остальном сравнение применимо.
Неудивительно, что комбинацию датчика положения и инвертора иногда называют «электронным коммутатором», а общее сходство в поведении дает начало термину «двигатель с электронной коммутацией» (ECM) или «бесщеточный двигатель постоянного тока» (BLDC) для обозначения самосинхронных электрических машин.
Эксплуатационные характеристики и управление
Если входное напряжение постоянного тока инвертора постоянно и двигатель запускается из состояния покоя, ток через двигатель сначала будет большим, но будет уменьшаться со скоростью до тех пор, пока кинетическая электромагнитная сила, создаваемая внутри двигателя, почти не сравняется с приложенным напряжением.
По мере увеличения нагрузки на вал скорость начинает уменьшаться, электромагнитная движущая сила уменьшается, а ток увеличивается до тех пор, пока не будет достигнуто новое равновесие, при котором дополнительный крутящий момент двигателя равен крутящему моменту нагрузки.
Это поведение аналогично обычному двигателю постоянного тока, где скорость холостого хода зависит от приложенного напряжения якоря.
Таким образом, скоростью самосинхронного двигателя можно управлять, контролируя напряжение в звене постоянного тока до инвертора.
Общее сходство с приводом постоянного тока намеренно подчеркнуто на рис. 3.
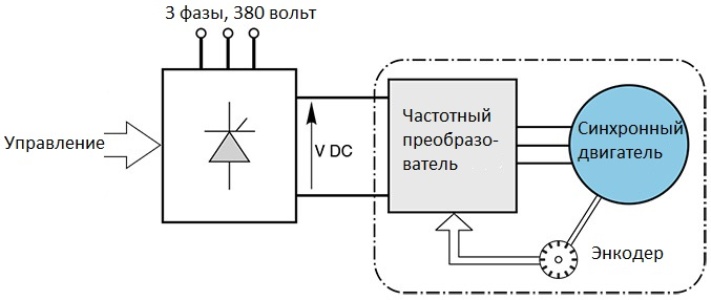
Рис. 3. Самодействующая система синхронного двигателя с инвертором. Для больших размеров такое устройство иногда называют синхронным приводом. Для меньших размеров, как бесщеточный привод с двигателем постоянного тока.
Штриховая линия, ограничивающая двигатель переменного тока вместе с датчиком положения ротора и инвертором, по существу заменяет обычный двигатель постоянного тока.
Однако отметим, что тахометр не является необходимым для регулирования скорости с обратной связью, поскольку сигнал обратной связи по скорости может быть получен из частоты сигнала положения ротора. И, как и в случае с приводом постоянного тока, можно использовать регулировку тока, а не регулировку напряжения, если необходимо контролировать выходной крутящий момент, а не число оборотов в минуту.
Если привод питается от полностью управляемого привода, возможна полноценная четырехквадрантная работа. С точки зрения затрат самосинхронная система кажется привлекательной, если совокупная стоимость частотного преобразователя и синхронного двигателя меньше стоимости эквивалентного двигателя постоянного тока.
Когда такие схемы были впервые представлены в 1970-х годах, они были рентабельны только при очень больших размерах (скажем, выше 1 МВт), но точка безубыточности для двигателей с возбуждением падает, и приводы с номинальной мощностью в сотни кВт теперь очень распространены.
Поскольку стоимость преобразователей упала, приводы меньшей мощности, использующие двигатели с постоянными магнитами, стали привлекательными, особенно там, где требуются очень высокие скорости и где обычный коллекторный двигатель постоянного тока не подходит из-за ограничений коммутатора.