

Асинхронный двигатель — двигатель переменного тока, в котором токи в обмотках статора создают вращающееся магнитное поле. Это магнитное поле индуктирует токи в обмотке ротора и, действуя на эти токи, увлекает за собой ротор.
Однако для того, чтобы во вращающемся роторе вращающееся магнитное поле статора индуктировало токи, ротор в своем вращении должен немного отставать от вращающегося, поля статора. Поэтому в асинхронном двигателе скорость вращения ротора всегда немного меньше скорости вращения магнитного поля (которая определяется частотой переменного тока, питающего двигатель).
Отставание ротора от вращающегося магнитного поля статора (скольжение ротора) тем больше, чем больше нагрузка двигателя. Отсутствие синхронизма между вращением ротора и магнитного поля статора — характерная черта асинхронного двигателя, от которой и происходит его название.
Вращающееся магнитное поле в статоре создается с помощью обмоток, питаемых токами, сдвинутыми по фазе. Обычно для этой цели применяется трехфазный переменный ток. Существуют также однофазные асинхронные двигатели, в которых сдвиг фаз между токами в обмотках создается включением различных реактивных сопротивлений в обмотки.
С целью регулировки угловой скорости вращения ротора, а также крутящего момента на валу современных бесщеточных двигателей, применяют либо векторное, либо скалярное управление электроприводом.
Скалярное управление
Более всего распространение получило скалярное управление асинхронным двигателем, когда для управления например скоростью вращения вентилятора или насоса, достаточно удерживать постоянной скорость вращения ротора, для этого хватает сигнала обратной связи от датчика давления или от датчика скорости.
Принцип скалярного управления прост: амплитуда питающего напряжения является функцией частоты, причем отношение напряжения к частоте оказывается приблизительно постоянным.
Конкретный вид этой зависимости связан с нагрузкой на валу, однако принцип остается таковым: повышаем частоту, а напряжение при этом пропорционально повышается в зависимости от нагрузочной характеристики данного двигателя.
В итоге магнитный поток в зазоре между ротором и статором поддерживается почти постоянным. Если же отношение напряжения к частоте отклонить от номинального для данного двигателя, то двигатель либо перевозбудится, либо недовозбудится, что приведет к потерям в двигателе и к сбоям в рабочем процессе.

Таким образом скалярное управление позволяет добиться почти постоянного момента на валу в рабочем диапазоне частот независимо от частоты, однако на низких скоростях момент все же снижается (чтобы этого не произошло, необходимо повысить отношение напряжения к частоте), поэтому для каждого двигателя имеет место строго определенный рабочий диапазон скалярного управления.
Кроме того, невозможно построить систему скалярного регулирования скорости без датчика скорости, установленного на валу, ибо нагрузка сильно влияет на отставание реальной скорости вращения ротора от частоты питающего напряжения. Но даже с датчиком скорости при скалярном управлении не получится с высокой точностью регулировать момент (по крайней мере так, чтобы это было экономически целесообразно).
В этом и заключаются недостатки скалярного управления, объясняющие относительную немногочисленность сфер его применения, ограниченных в основном обычными асинхронными двигателями, где зависимость скольжения от нагрузки не является критичной.

Векторное управление
Для избавления от названных недостатков, в далеком 1971 году инженеры компании Сименс предложили использовать векторное управление двигателем, при котором контроль осуществляется с обратной связью по величине магнитного потока. Первые системы векторного управления содержали датчики потока в двигателях.
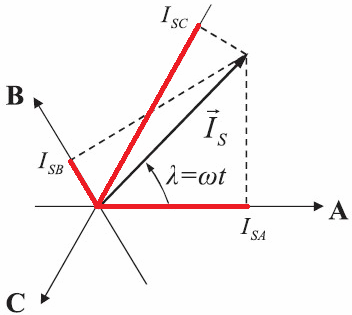
Сегодня подход к данному методу несколько иной: математическая модель двигателя позволяет рассчитывать скорость вращения ротора и момент на валу в зависимости от текущих токов фаз (от частоты и величин токов в обмотках статора).
Этот более прогрессивный подход предоставляет возможность независимо и почти безынерционно регулировать как момент на валу, так и скорость вращения вала под нагрузкой, ибо в процессе управления учитываются еще и фазы токов.
Некоторые более точные системы векторного управления оснащены схемами обратной связи по скорости, при этом системы управления без датчиков скорости именуются бездатчиковыми.
Так, в зависимости от области применения того или иного электропривода, его система векторного управления будет иметь свои особенности, свою степень точности регулировки.
Когда требования к точности регулировки скорости допускают отклонение до 1,5%, а диапазон регулировки — не превышает 1 к 100, то бездатчиковая система вполне подойдет. Если же требуется точность регулировки скорости с отклонением не более 0,2%, а диапазон сводится до 1 к 10000, то необходимо наличие обратной связи по датчику скорости на валу. Наличие датчика скорости в системах векторного управления позволяет точно регулировать момент даже при низких частотах до 1 Гц.

Итак, векторное управление дает следующие преимущества. Высокую точность управления скоростью вращения ротора (и без датчика скорости на нем) даже в условиях динамически изменяющейся нагрузки на валу, при этом рывков не будет. Плавное и ровное вращение вала на малых скоростях. Высокий КПД в силу низких потерь в условиях оптимальных характеристик напряжения питания.
Не обходится векторное управление без недостатков. Сложность вычислительных операций. Необходимость задавать исходные данные (параметры регулируемого привода).
Для группового электропривода векторное управление принципиально не годится, здесь лучше подойдет скалярное.
Андрей Повный