

Параметрическое управление
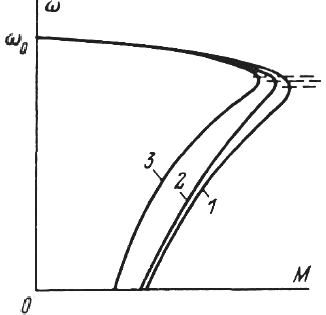
Рис. 1. Механические характеристики асинхронного двигателя при изменении параметров первичной и вторичной цепи: 1 - естественная, 2 и 3 - при введении добавочного активного и индуктивного сопротивления в цепь статора
Сопоставляя ее с естественной характеристикой двигателя, можно сделать вывод, что введение добавочного сопротивления в цепь статора мало влияет на скорость. При неизменном статическом моменте скорость понизится незначительно. Поэтому данный способ регулирования скорости малоэффективен и в таком простейшем варианте не используется.
Малоэффективно и введение индуктивного сопротивления в цепь статора. Критическое скольжение также несколько уменьшится, а момент двигателя за счет увеличения сопротивления снижается существенно. Соответствующая механическая характеристика представлена на том же рис. 1.
Иногда добавочное сопротивление вводится в цепь статора для ограничения пусковых токов. При этом в качестве дополнительного индуктивного сопротивления обычно применяют дроссели, а активного — тиристоры (рис. 2).
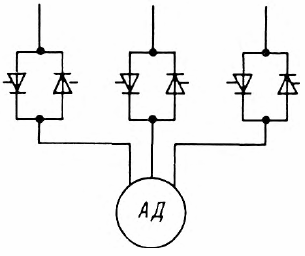
Рис. 2. Включение тиристоров в цепь статора
Следует, однако, иметь в виду, что при этом существенно уменьшается не только критический, но и пусковой момент двигателя (при s = 1), а значит, пуск в этих условиях возможен лишь при малом статическом моменте. Введение добавочного сопротивления в цепь ротора, естественно, возможно лишь для двигателя с фазным ротором.
Добавочное индуктивное сопротивление в цепи ротора оказывает такое же влияние на скорость двигателя, как и введение его в цепь статора.
Практически использование индуктивного сопротивления в цепи ротора крайне затруднено, в связи с тем что оно должно функционировать при переменной частоте — от 50 Гц до нескольких герц, а иногда и долей герца. Для таких условий создать дроссель весьма трудно.
При малой частоте в основном будет сказываться активное сопротивление катушки индуктивности. Исходя из приведенных соображений индуктивное сопротивление в цепи ротора для регулирования скорости никогда не используется.
Наиболее эффективный способ параметрического регулирования скорости — введение добавочного активного сопротивления в цепь ротора. При этом мы получаем семейство характеристик с постоянным максимальным моментом. Эти характеристики используются для ограничения тока и поддержания постоянного момента, а также могут применяться и для управления скоростью.
На рис. 3 показано, как, изменяя r2, т. е. вводя rдоб, можно при некотором статическом моменте изменять скорость в широких пределах — от номинальной до нуля. Однако практически можно регулировать скорость лишь при достаточно больших значениях статического момента.
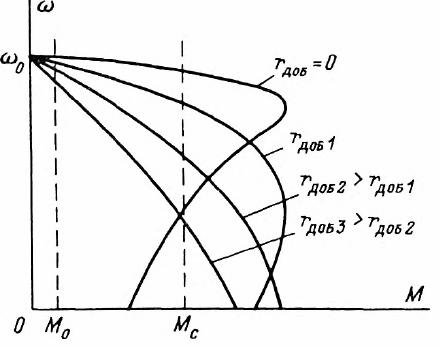
Рис. 3. Механические характеристики асинхронного двигателя при введении добавочного сопротивления в цепь ротора
При малых значениях (Мо) в режиме, близком к холостому ходу, диапазон регулирования скорости существенно сокращается и для заметного снижения скорости пришлось бы вводить весьма большие добавочные сопротивления.
Следует иметь в виду, что при работе на низких скоростях и при больших статических моментах стабильность скорости будет недостаточна, так как из-за большой крутизны характеристик незначительные флюктуации момента будут вызывать существенные изменения скорости.
Иногда для обеспечения разгона двигателя без последовательного выведения секций реостата параллельно подключают реостат и катушку индуктивности к кольцам ротора (рис. 4).
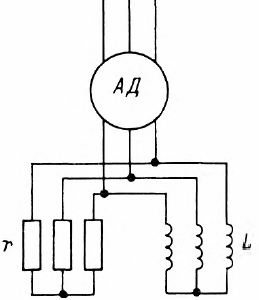
Рис. 4. Параллельное включение добавочного активного и индуктивного сопротивления в цепь ротора асинхронного двигателя
В начальный момент пуска, когда частота тока в роторе велика, ток в основном замыкается через реостат, т. е. через большое сопротивление, чем обеспечивается достаточно высокий пусковой момент. По мере снижения частоты индуктивное сопротивление снижается и ток начинает замыкаться и через индуктивность.
При выходе на рабочие скорости, когда скольжение мало, ток в основном протекает через катушку индуктивности, сопротивление которой при малой частоте определяется электрическим сопротивлением обмотки rоб. Таким образом, при пуске внешнее сопротивление вторичного контура как бы автоматически изменяется от rреост до rоб и разгон происходит практически при постоянном моменте.
Параметрическое управление, естественно, связано с большими потерями энергии. Энергия скольжения, которая в виде электромагнитной энергии передается через зазор со статора на ротор и обычно преобразуется в механическую, при большом сопротивлении вторичного контура в основном идет на нагрев этого сопротивления, и при s = 1 вся энергия, передаваемая со статора на ротор, будет расходоваться в реостатах вторичного контура (рис. 5).
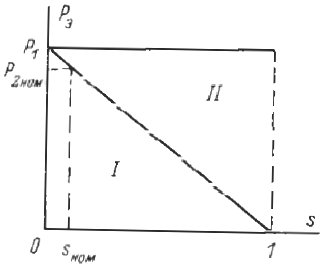
Рис. 5. Потери во вторичном контуре при регулировании скорости асинхронного двигателя введением добавочного сопротивления в цепь ротора: I - зона полезной мощности, передаваемой на вал двигателя, II - зона потерь в сопротивлениях вторичного контура
Поэтому параметрическое управление в основном используется для кратковременного снижения скорости по ходу технологического процесса, выполняемого рабочей машиной. Лишь в тех случаях, когда процессы управления скоростью сочетаются с пуском и торможением рабочей машины, как, например, в подъемных установках, параметрическое управление с введением добавочного сопротивления в цепь ротора используется как основное средство регулирования скорости.
Регулирование скорости изменением подводимого к статору напряжения
При регулировании скорости асинхронного двигателя изменением напряжения форма механической характеристики при этом сохраняется неизменной, а моменты снижаются пропорционально квадрату напряжения. Механические характеристики при различном напряжении представлены на рис. 6. Как видно, в случае использования двигателей обычного исполнения диапазон регулирования скорости весьма ограничен.
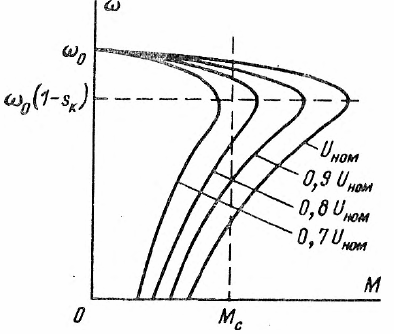
Рис. 6. Регулирование скорости асинхронного двигателя изменением напряжения в цепи статора
Несколько больший диапазон может быть обеспечен с двигателем повышенного скольжения. Однако в этом случае механические характеристики имеют большую крутизну (рис. 7) и устойчивая работа двигателя может быть достигнута лишь при использовании замкнутой системы, обеспечивающей стабилизацию скорости.
При изменении статического момента система регулирования поддерживает заданный уровень скорости и происходит переход с одной механической характеристики на другую. В итоге работа протекает на характеристиках, показанных штриховыми линиями.
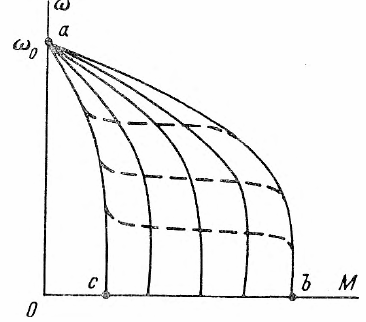
Рис. 7. Механические характеристики при регулировании напряжения статора в замкнутой системе
При перегрузке привода двигатель выходит на предельную характеристику аb, соответствующую максимальному возможному напряжению, которое обеспечивает преобразователь, и при дальнейшем росте нагрузки скорость будет снижаться по этой характеристике. При малых нагрузках, если преобразователь не сможет снизить напряжение до нулевого, будет подъем скорости по характеристике ас.
В качестве источника с регулируемым напряжением обычно используют магнитные усилители или тиристорные преобразователи. В случае использования тиристорного преобразователя (рис. 8) последний обычно функционирует в импульсном режиме. При этом на зажимах статора асинхронного двигателя поддерживается некоторое среднее напряжение, необходимое для обеспечения заданной скорости.
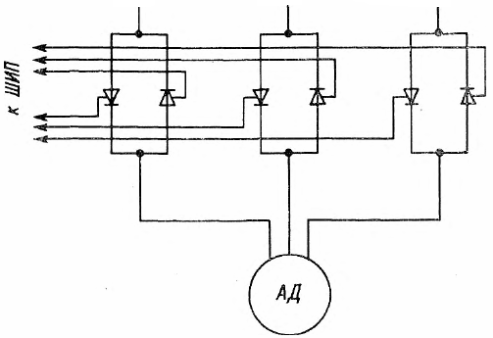
Рис. 8. Схема импульсного управления скоростью асинхронного двигателя
Для регулирования напряжения на зажимах статора двигателя, казалось бы, возможно использование трансформатора или автотрансформатора с секционными обмотками. Однако применение индивидуальных трансформаторных агрегатов связано с очень большими затратами и не обеспечивает нужного качества регулирования, так как в этом случае возможно только ступенчатое изменение напряжения, а ввести в автоматическую систему устройство переключения секций практически невозможно. Иногда автотрансформаторы используются для ограничения пусковых токов мощных двигателей.
Регулирование скорости переключением секций обмоток статора на различное число пар полюсов
Существует ряд производственных механизмов, которые по ходу технологического процесса должны работать на различных уровнях скорости, при этом нет необходимости в плавном регулировании, а достаточно иметь привод с дискретным, ступенчатым, изменением скорости. К подобным механизмам относятся некоторые металло- и деревообрабатывающие станки, подъемники и др.
Ограниченное число фиксированных скоростей вращения может быть обеспечено с помощью многоскоростных короткозамкнутых двигателей, в которых обмотка статора переключается на различное число пар полюсов. Беличья клетка короткозамкнутого двигателя автоматически образует число полюсов, равное числу полюсов статора.
Используется две конструкции двигателей: с несколькими обмотками в каждом пазу статора и с одной обмоткой, секции которой переключаются для получения различного числа пар полюсов.
Многоскоростные двигатели с несколькими независимыми обмотками на статоре по техническим и экономическим показателям уступают многоскоростным однообмоточным. В многообмоточных двигателях неэффективно используется обмотка статора, заполнение паза статора недостаточно, КПД и cosφ ниже оптимальных. Поэтому основное распространение получили многоскоростные однообмоточные двигатели с переключением секций обмотки на различное число пар полюсов.
При переключении секций изменяется распределение МДС в расточке статора. В результате скорость вращения МДС, а следовательно, и магнитного потока тоже изменяется. Наиболее просто осуществляется переключение пар полюсов с отношением 1 : 2. В этом случае обмотки каждой фазы выполняются в виде двух секций. Изменение направления тока в одной из секций позволяет изменить число пар полюсов в два раза.
Рассмотрим схемы обмотки статора двигателя, секции которой переключаются на восемь и четыре полюса. На рис. 9 изображена для простоты обмотка одной фазы. При последовательном соединении двух секций, т. е. при соединении конца первой секции К1 с началом второй Н2, получаем восемь полюсов (рис. 9,а).
Если изменить направление тока во второй секции на обратное, то число полюсов, образуемое обмоткой, уменьшится в два раза и будет равно четырем (рис. 9,б). Направление тока во второй секции может быть изменено переносом перемычки с зажимов К1, Н2 на зажимы К1, К2. Также четыре полюса могут быть получены при параллельном соединении секций (рис. 9, в).
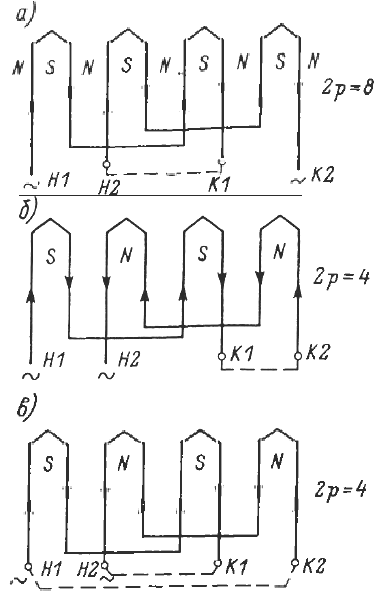
Рис. 9. Переключение секций обмотки статора на различное число пар полюсов
Механические характеристики для двухскоростного двигателя с переключением секций обмотки статора представлены на рис. 10.
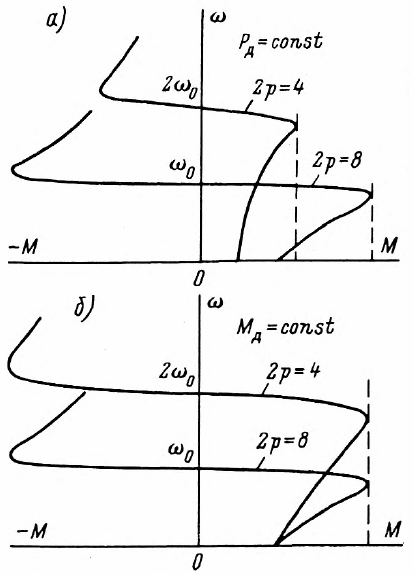
Рис. 10. Механические характеристики асинхронного двигателя при переключении обмотки статора на различное число пар полюсов
При переходе от схемы а к схеме б (рис. 9) на обоих уровнях скорости сохраняется постоянная мощность двигателя (рис. 10,а). При использовании второго варианта переключения двигатель способен развивать один и тот же момент. Возможно переключение секций обмотки статора, обеспечивающее соотношение скоростей не только 1 : 2, но и другие. Промышленностью наряду с двухскоростными двигателями выпускаются также трех- и четырехскоростные.
Частотное управление трехфазными двигателями
Как следует из изложенного, регулирование скорости асинхронного двигателя крайне затруднено. Плавное регулирование скорости в широких пределах с сохранением достаточной жесткости характеристик возможно только при частичном управлении. Изменяя частоту питающего тока, а следовательно, скорость вращения магнитного поля, можно регулировать скорость вращения ротора двигателя.
Однако для частотного управления в установке необходим преобразователь частоты, который был бы в состоянии преобразовать ток постоянной частоты питающей сети 50 Гц в ток переменной регулируемой частоты, плавно изменяющейся в широких пределах.
Первоначально были попытки использования электромашинных преобразователей. Однако, чтобы получить ток переменной частоты от синхронного генератора, необходимо вращать его ротор с переменной скоростью. При этом задачи регулирования скорости рабочего двигателя возлагаются на двигатель, приводящий во вращение синхронный генератор.
Коллекторный генератор, который может генерировать ток переменной частоты при постоянной скорости вращения тоже не позволил решить задачу, так как, во-первых, для его возбуждения необходим ток переменной частоты, а во-вторых, как у всех коллекторных машин переменного тока, возникают большие трудности с обеспечением нормальной коммутации на коллекторе.
Практически частотное управление начало развиваться с появлением полупроводниковых приборов. При этом оказалось возможным создать преобразователи частоты управления как установками большой мощности, так и исполнительными двигателями в следящих системах и сервоприводах.
Наряду со сложностью построения преобразователя частоты возникает еще необходимость одновременного управления по двум величинам — частоте и напряжению. При уменьшении частоты с целью снижения скорости равновесие ЭДС и напряжения сети может быть сохранено только за счет увеличения магнитного потока двигателя. При этом магнитная цепь будет насыщаться, а ток статора — интенсивно нарастать по нелинейному закону. В итоге работа асинхронного двигателя в режиме частотного управления при неизменном напряжении оказывается невозможной.
Уменьшая частоту с целью сохранения неизменным магнитного потока, необходимо одновременно снижать и уровень напряжения. Таким образом, при частотном управлении должны использоваться два канала управления: по частоте и по напряжению.
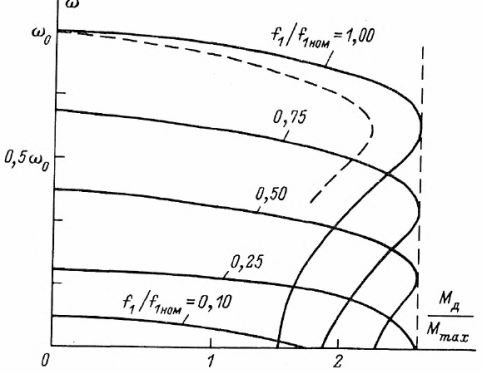
Рис. 11. Механические характеристики асинхронного двигателя при питании напряжением регулируемой частоты и постоянном магнитном потоке
Системы частотного управления обычно строятся как системы замкнутые, и дополнительные сведения о них изложены здесь: Частотное регулирование асинхронного двигателя