

Ротор любого электродвигателя приводится в движение под действием сил, вызванных вращающимся электромагнитным полем внутри обмотки статора. Скорость его оборотов обычно определяется промышленной частотой электрической сети.
Ее стандартная величина в 50 герц подразумевает совершение пятидесяти периодов колебаний в течение одной секунды. За одну минуту их число возрастает в 60 раз и составляет 50х60=3000 оборотов. Такое же число раз проворачивается ротор под воздействием приложенного электромагнитного поля.
Если изменять величину частоты сети, приложенной к статору, то можно регулировать скорость вращения ротора и подключенного к нему привода. Этот принцип заложен в основу управления электродвигателями.

Виды частотных преобразователей
По конструкции частотные преобразователи бывают:
1. индукционного типа;
2. электронные.
Асинхронные электродвигатели, выполненные по схеме с фазным ротором и запущенные в режим генератора, являются представителями первого вида. Они при работе обладают низким КПД и отмечаются маленькой эффективностью. Поэтому они не нашли широкого применения в производстве и используются крайне редко.
Способ электронного преобразования частоты позволяет плавно регулировать обороты как асинхронных, так и синхронных машин. При этом может быть реализован один из двух принципов управления:
1. по заранее заданной характеристике зависимости скорости вращения от частоты (V/f);
2. метод векторного управления.
Первый способ является наиболее простым и менее совершенным, а второй используется для точного регулирования скоростей вращения ответственного промышленного оборудования.

Особенности векторного управления частотным преобразованием
Отличием этого способа является взаимодействие, влияние устройства управления преобразователя на «пространственный вектор» магнитного потока, вращающийся с частотой поля ротора.
Алгоритмы для работы преобразователей по этому принципу создаются двумя способами:
1. бессенсорного управления;
2. потокорегулирования.
Первый метод основан на назначении определенной зависимости чередования последовательностей широтно-импульсной модуляции (ШИМ) инвертора для заранее подготовленных алгоритмов. При этом амплитуда и частота напряжения на выходе преобразователя регулируются по скольжению и нагрузочному току, но без использования обратных связей по скорости вращения ротора.
Этим способом пользуются при управлении несколькими электродвигателями, подключенными параллельно к преобразователю частоты. Потокорегулирование подразумевает контроль рабочих токов внутри двигателя с разложением их на активную и реактивную составляющие и внесение корректив в работу преобразователя для выставления амплитуды, частоты и угла для векторов выходного напряжения.
Это позволяет повысить точность работы двигателя и увеличить границы его регулирования. Применение потокорегулирования расширяет возможности приводов, работающих на малых оборотах с большими динамическими нагрузками, такими как подъемные крановые устройства или намоточные промышленные станки.
Использование векторной технологии позволяет применять динамическую регулировку вращающихся моментов к трехфазным асинхронным двигателям.
Схема замещения
Принципиальную упрощенную электрическую схему асинхронного двигателя можно представить следующим видом.
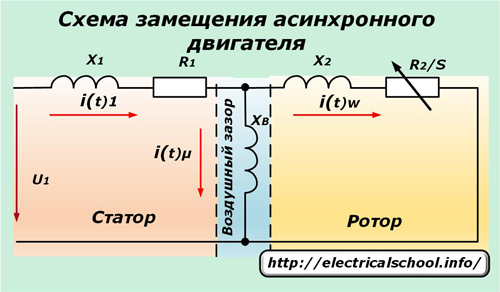
На обмотки статора, обладающие активным R1 и индуктивным X1 сопротивлениями, приложено напряжение u1. Оно, преодолевая сопротивление воздушного зазора Хв, трансформируется в обмотку ротора, вызывая в ней ток, который преодолевает ее сопротивление.
Векторная диаграмма схемы замещения
Ее построение помогает понять происходящие процессы внутри асинхронного двигателя.
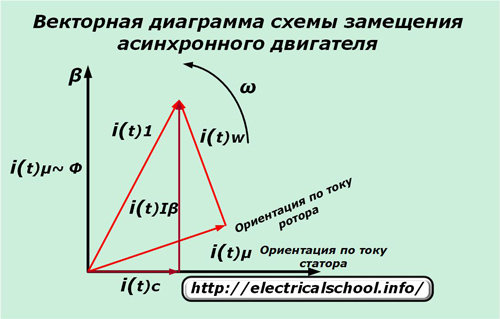
Энергия тока статора разделяется на две части:
-
iµ — потокообразующую долю;
-
iw — моментообразующую составляющую.
При этом ротор обладает активным сопротивлением R2/s, зависящим от скольжения.
Для бессенсорного управления измеряются:
-
напряжение u1;
-
ток i1.
По их значениям рассчитывают:
-
iµ — потокообразующую составляющую тока;
-
iw — моментообразующую величину.
В алгоритм расчета уже заложили электронную эквивалентную схему асинхронного двигателя с регуляторами тока, в которой учтены условия насыщения электромагнитного поля и потерь магнитной энергии в стали.
Обе этих составляющих векторов тока, отличающиеся по углу и амплитуде, вращаются совместно с системой координат ротора и пересчитываются в стационарную систему ориентации по статору.
По этому принципу подстраиваются параметры частотного преобразователя под нагрузку асинхронного двигателя.
Принцип работы частотного преобразователя
В основу этого устройства, которое еще называют инвертором, заложено двойное изменение формы сигнала питающей электрической сети.
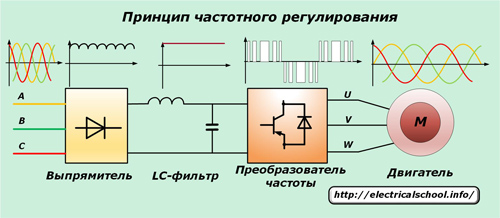
Вначале промышленное напряжение подается на силовой выпрямительный блок с мощными диодами, которые убирают синусоидальные гармоники, но оставляют пульсации сигнала. Для их ликвидации предусмотрена батарея конденсаторов с индуктивностью (LC-фильтр), обеспечивающая стабильную, сглаженную форму выпрямленному напряжению.
Затем сигнал поступает на вход преобразователя частоты, который представляет собой мостовую трехфазную схему из шести силовых транзисторов серии IGBT или MOSFET с диодами защиты от пробоя напряжений обратной полярности. Используемые ранее для этих целей тиристоры не обладают достаточным быстродействием и работают с большими помехами.
Для включения режима «торможения» двигателя в схему может быть установлен управляемый транзистор с мощным резистором, рассеивающим энергию. Такой прием позволяет убирать генерируемое двигателем напряжение для защиты конденсаторов фильтра от перезарядки и выхода из строя.
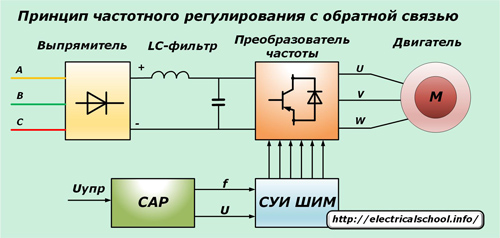
Способ векторного управления частотой преобразователя позволяет создавать схемы, осуществляющие автоматическое регулирование сигнала системами САР. Для этого используется система управления:
1. амплитудная;
2. ШИМ (широтного импульсного моделирования).
Метод амплитудного регулирования основан на изменении входного напряжения, а ШИМ — алгоритма переключений силовых транзисторов при неизменном напряжении входа.
При ШИМ регулировании создается период модуляции сигнала, когда обмотка статора подключается по строгой очередности к положительным и отрицательным выводам выпрямителя.
Поскольку частота такта генератора довольно высокая, то в обмотке электродвигателя, обладающего индуктивным сопротивлением, происходит их сглаживание до синусоиды нормального вида.
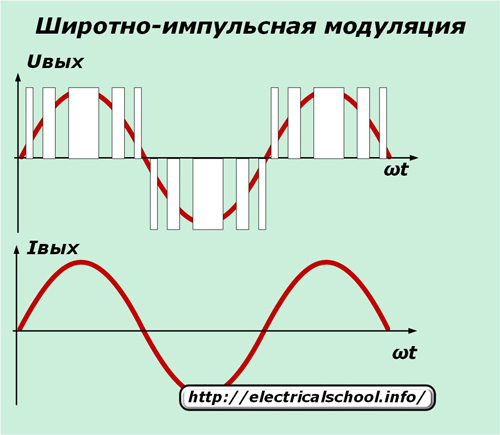
Способы ШИМ управления позволяют максимально исключить потери энергии и обеспечивают высокий КПД преобразования за счет одновременного управления частотой и амплитудой. Они стали доступны благодаря развитию технологий управления силовыми запираемыми тиристорами серии GTO или биполярных марок транзисторов IGBT, обладающих изолированным затвором.
Принципы их включения для управления трехфазным двигателем показаны на картинке.
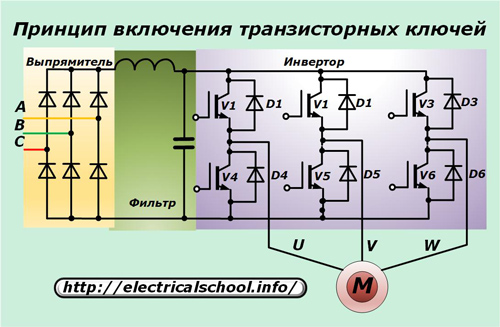
Каждый из шести IGBT-транзисторов подключается по встречно-параллельной схеме к своему диоду обратного тока. При этом через силовую цепь каждого транзистора проходит активный ток асинхронного двигателя, а его реактивная составляющая направляется через диоды.
Для ликвидации влияния внешних электрических помех на работу инвертора и двигателя в конструкцию схемы преобразователя частоты может включаться помехозащитный фильтр, ликвидирующий:
-
радиопомехи;
-
наводимые работающим оборудованием электрические разряды.
Их возникновение сигнализирует контроллер, а для уменьшения воздействия используется экранированная проводка между двигателем и выходными клеммами инвертора.
С целью улучшения точности работы асинхронных двигателей в схему управления частотных преобразователей включают:
-
ввода связи с расширенными возможностями интерфейса;
-
встроенный контроллер;
-
карту памяти;
-
программное обеспечение;
-
информационный Led-дисплей, отображающий основные выходные параметры;
-
тормозной прерыватель и встроенный ЭМС фильтр;
-
систему охлаждения схемы, основанную на обдуве вентиляторами повышенного ресурса;
-
функцию прогрева двигателя посредством постоянного тока и некоторые другие возможности.
Эксплуатационные схемы подключения
Частотные преобразователи создаются для работы с однофазными или трехфазными сетями. Однако, если есть промышленные источники постоянного тока с напряжением 220 вольт, то от них тоже можно запитывать инверторы.

Трехфазные модели рассчитываются на напряжение сети 380 вольт и выдают его на электродвигатель. Однофазные же инверторы питаются от 220 вольт и на выходе выдают три разнесенных по времени фазы.
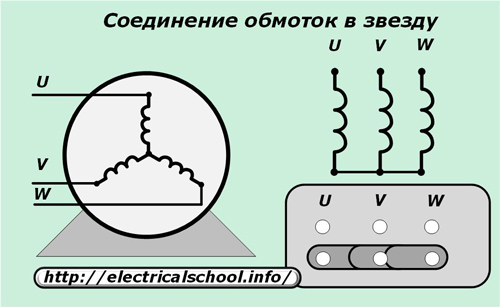
Схема подключения частотного преобразователя к двигателю может быть выполнена по схемам:
-
звезды;
-
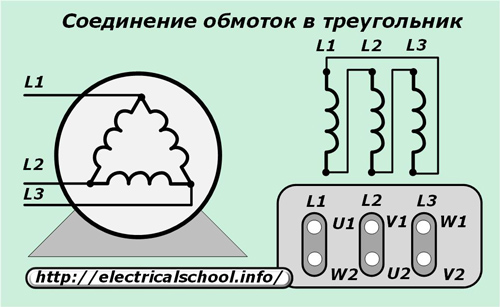
треугольника.
Обмотки двигателя собираются в «звезду» для преобразователя, запитанного от трехфазной сети 380 вольт.
По схеме «треугольник» собирают обмотки двигателя, когда питающий его преобразователь подключен к однофазной сети 220 вольт.
Выбирая способ подключения электрического двигателя к преобразователю частоты надо обращать внимание на соотношение мощностей, которые может создать работающий двигатель на всех режимах, включая медленный, нагруженный запуск, с возможностями инвертора.
Нельзя постоянно перегружать частотный преобразователь, а небольшой запас его выходной мощности обеспечит ему длительную и безаварийную работу.
Смотрите также: Как правильно выбрать частотный преобразователь