

 Сельсины представляют собой особый вид электрических машин переменного тока мощностью от нескольких ватт до нескольких сот ватт (менее киловатта). Служит сельсин для дистанционной передачи механического угла поворота электрическим путем между устройствами, не имеющими между собой механической связи.
Сельсины представляют собой особый вид электрических машин переменного тока мощностью от нескольких ватт до нескольких сот ватт (менее киловатта). Служит сельсин для дистанционной передачи механического угла поворота электрическим путем между устройствами, не имеющими между собой механической связи.
Всякий сельсин имеет статор и ротор, на которых расположены обмотки переменного тока. Существуют сельсины с однокатушечной обмоткой на статоре и трехкатушечной на роторе, и, наоборот, с трехкатушечной обмоткой на статоре и однокатушечной на роторе, и, наконец, с трехкатушечной обмоткой на статоре и с такой же обмоткой на роторе.
По своему назначению в схемах авторегулирования сельсины делятся на:
- сельсин-датчики,
- сельсин-приемники
- дифференциальные.
Для уяснения работы сельсина рассмотрим рис. 1, а.
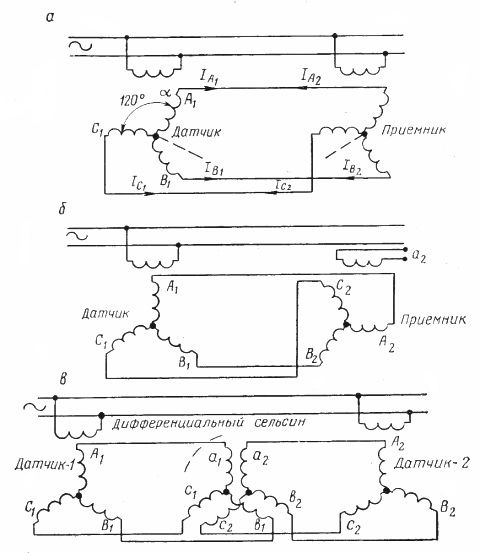
Рис. 1. Схемы включения сельсинов: а - по системе датчик - приемник; б - сельсин-приемник в трансформаторном режиме; в - дифференциального
Сельсин-датчик и сельсин-приемник своими однокатушечными обмотками статора подключены к одной и той же сети переменного тока, а трехкатушечные обмотки ротора соединены между собой. Если теперь повернуть ротор датчика на произвольный угол, то на такой же угол повернется ротор приемника. Если ротор датчика вращать непрерывно с произвольной скоростью, то с такой же скоростью будет вращаться и ротор приемника.
Действие сельсинной связи основано на принципе электромагнитной индукции, заключающейся в следующем. Переменный ток однокатушечной обмотки статора индуктирует в трехкатушечной обмотке ротора токи, величины которых зависят от относительного расположения обмоток ротора и статора.
Если роторы обоих сельсинов расположены одинаково по отношению к своим статорам, то токи в соединительных проводах роторов равны и противоположны между собой, и поэтому ток в каждой катушке равен нулю. Как следствие, равен нулю вращающий момент на валу одного и другого сельсинов.
Если теперь вручную или иным способом повернуть ротор сельсин-датчика на определенный угол, то нарушится равновесие токов между роторами, и на валу сельсин-приемника возникнет вращающийся момент, благодаря чему его ротор будет поворачиваться до тех пор, пока не исчезнет неравновесие, токов, т. е. пока этот ротор не примет то же положение, что и сельсин-датчик.

В системах авторегулирования нередко сельсин-приемник работает в трансформаторном режиме (рис. 1, б). В этом случае ротор приемника закрепляется неподвижно, а обмотка его статора отключается от сети. В этой обмотке индуктируется э. д. с. со стороны ротора, по обмоткам которого протекают токи, обусловливаемые положением ротора сельсин-датчика. Это означает, что величина э. д. с. на зажимах ротор приемника пропорциональна углу поворота датчика.
В исходном положении роторы смещены на 90° относительно друг друга и в этом случае индуктируемая на роторе датчика э. д. с. равна нулю. Теперь при повороте ротора-датчика на роторе приемника будет индуктироваться э. д. с. Епр, пропорциональная углу рассогласования роторов
Епр = Емакс х sinθ
Дифференциальный сельсин применяется в тех случаях, когда нужно контролировать разность углов поворота двух осей, т. е. их рассогласование. В этом случае два сельсин-датчика находятся на двух валах, скорости которых сравниваются между собой. Трехкатушечными обмотками роторы этих сельсинов соединены с трехкатушечными обмотками статора и ротора третьего сельсина, являющегося дифференциальным (рис. 1, в). Угол поворота ротора дифференциального сельсина равен разности углов поворота сельсин-датчиков.