

Имеется огромное разнообразие электрических машин постоянного и переменного тока, мощность которых колеблется от долей ватта до нескольких сотен ватт и которые принято называть микромашинами.
Микромашины широко применяются как управляющие и исполнительные элементы в системах автоматического управления, а также для многих других целей в промышленности и в быту.
Наиболее часто микромашины используются как электродвигатели, среди которых можно выделить двигатели постоянного тока с электромагнитным возбуждением и магнитоэлектрические, универсальные коллекторные двигатели, однофазные асинхронные двигатели различного исполнения, синхронные реактивные и шаговые двигатели, гистерезисные двигатели.
Кроме того, находят применение микрогенераторы постоянного и переменного тока. Таковы, например, тахогенераторы постоянного тока и асинхронные тахогенераторы. Часто микрогенераторы используются как специальные источники постоянного тока или переменного тока повышенной частоты для питания схем управления и исполнительных двигателей движущихся устройств.
В следящих системах широко применяются сельсины, представляющие собой разновидность асинхронной машины. Для получения напряжения переменного тока, являющегося той или иной функцией угла поворота ротора, используются вращающиеся трансформаторы, которые выполняются как асинхронные машины с фазным ротором.
Требования, предъявляемые к микромашинам, разнообразны и определяются назначением машин и условиями их работы. Однако общим требованием является обеспечение заданных рабочих характеристик при высокой надежности работы во всех эксплуатационных условиях.
Микродвигателя постоянного тока
Микродвигатели постоянного тока широко используются в системах автоматического управления в качестве исполнительных двигателей, а также для привода различных механизмов и машин.
Условия работы микродвигателей весьма разнообразны. Так, электродвигатели механизмов дистанционного управления и вычислительных устройств обычно работают в кратковременном или повторно-кратковременном режиме с рабочим периодом от одной до нескольких минут и частым реверсированием.
Напротив, двигатели привода гироскопических устройств, вентиляторов, сирен и т. д. имеют продолжительный режим работы при постоянстве скорости вращения. Кроме того, параметры окружающей среды (температура, влажность, давление, механические перегрузки и т. д.) могут изменяться в широких пределах.
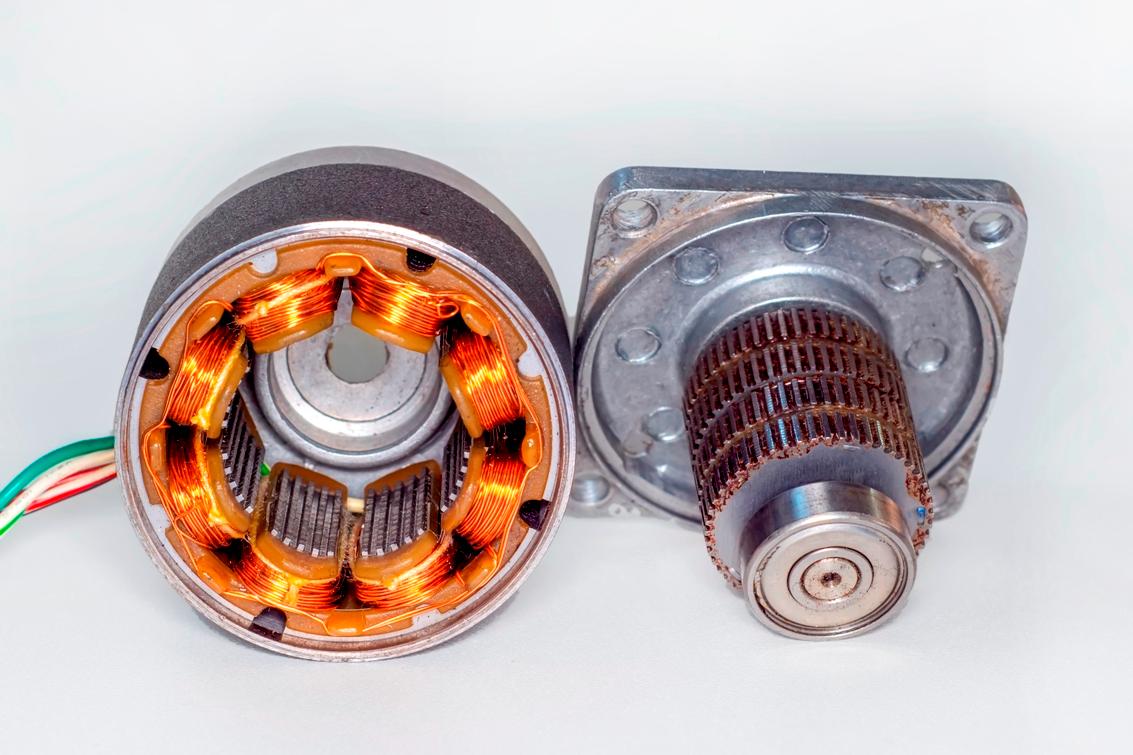
Микродвигатели постоянного тока выполняют закрытыми либо защищенными. При этом конструкция двигателя, как правило, проста и состоит из нескольких элементов. С целью уменьшения массы и габаритов скорость двигателей обычно выбирают повышенной.
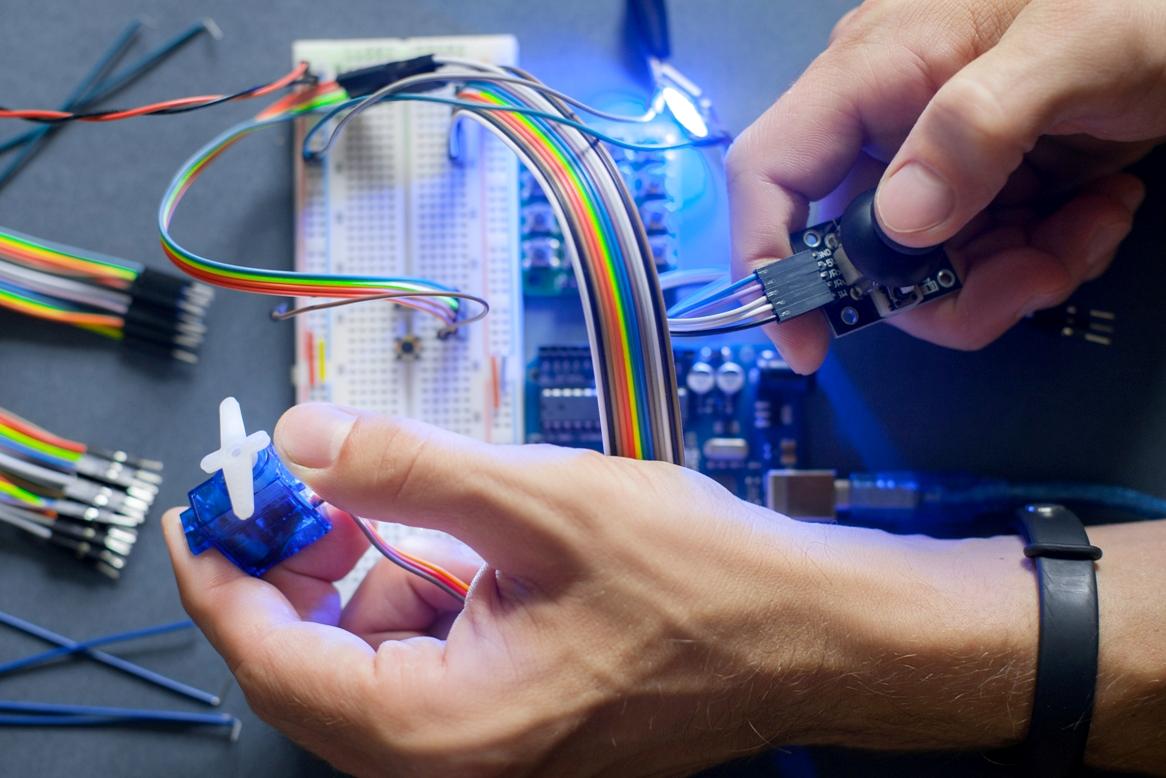
Двигатель постоянного тока в сервомашинке для Arduino:
Способ возбуждения определяется условиями применения двигателей. Когда необходим достаточно высокий пусковой момент, выбирают последовательную обмотку возбуждения.
Реверсивные двигатели нередко снабжены двумя обмотками возбуждения, включаемыми поочередно в зависимости от требуемого направления вращения. Иногда (особенно при мощностях 20 Вт и менее) наибольший пусковой момент удастся обеспечить при параллельном включении обмотки возбуждения.
Вообще в тех случаях, когда необходима постоянная скорость вращения, целесообразно параллельное возбуждение. Смешанное возбуждение, как и возбуждение от постоянных магнитов, в микродвигателях постоянного тока применяется сравнительно редко и только в специальных случаях.
Пуск и реверсирование микродвигателей производится путем прямого подключения к питающей сети. Действительно, сопротивление обмотки якоря таких двигателей, ограничивающее пусковой ток, сравнительно велико, поэтому необходимости в пусковых реостатах нет.
Вид механических характеристик микродвигателей постоянного тока сильно зависит от способа возбуждения. В зависимости от конкретного применения необходимы либо стабилизация, либо, напротив, регулирование скорости микродвигателя по некоторому заданному закону.
Наиболее распространено регулирование скорости путем изменения напряжения якоря, а также путем изменения рабочего магнитного потока.
Чаще всего исполнительные двигатели постоянного тока обычно имеют независимое возбуждение или возбуждение от постоянных магнитов.
Современные микромашины постоянного тока: Современные бесколлекторные двигатели постоянного тока
Широкое распространение микромашины нашли в мехатронике: Что такое мехатроника и мехатронные устройства

Универсальные коллекторные двигатели
Коллекторный двигатель с последовательным возбуждением может работать при питании как постоянным, так и переменным током и поэтому называется универсальным.
Если питание двигателя осуществляется переменным током, магнитные поля обмотки возбуждения и якоря, создаваемые одним и тем же током, изменяют свое направление одновременно.
Электромагнитный момент, возникающий в результате взаимодействия этих полей, действует всегда в неизменном направлении, пульсируя с двойной частотой. При этом обеспечивается средний момент одного направления, и работа двигателя в целом подобна работе на постоянном токе.
Для уменьшения потерь от гистерезиса и вихревых токов весь магнитопровод универсального коллекторного двигателя целесообразно выполнять шихтованным.
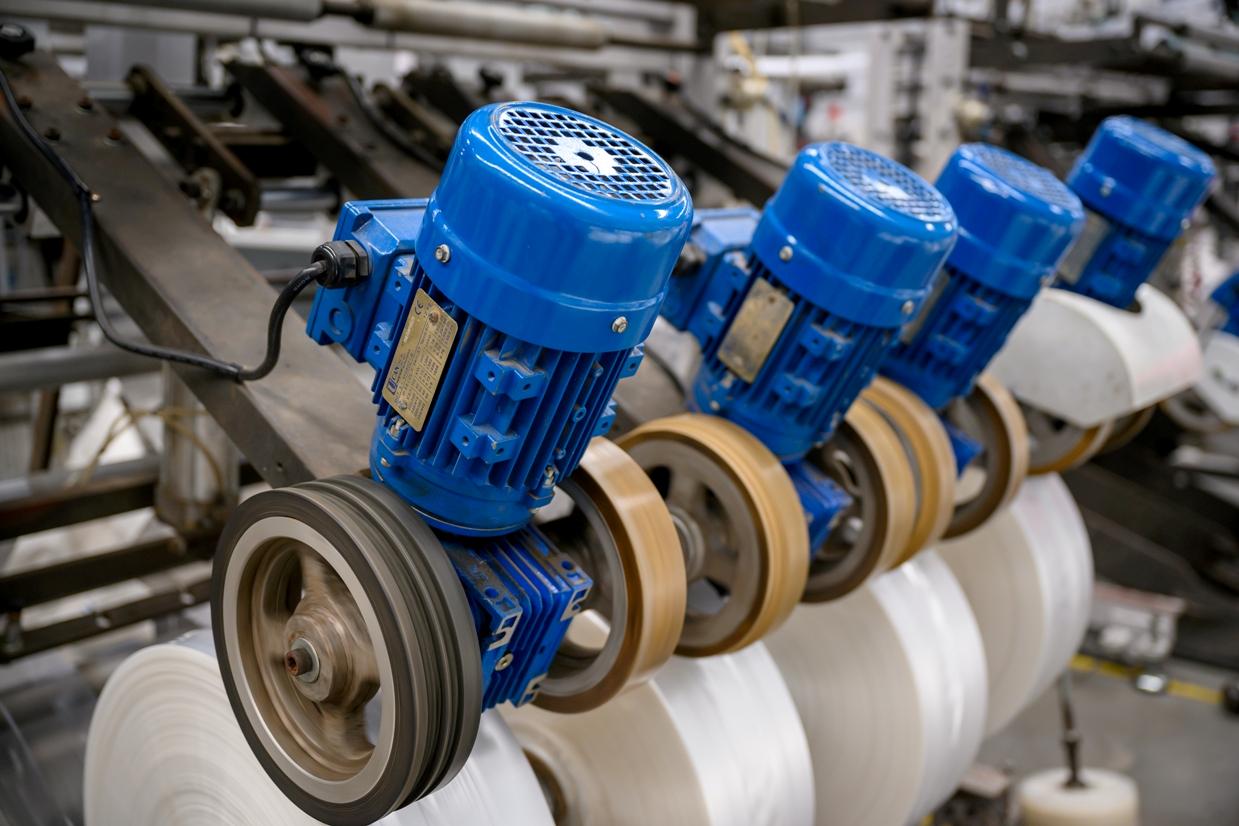
Универсальные двигатели используются там, где необходимо уменьшить массу, например, в пылесосах, ручном электроинструменте и т. д. и работают обычно на высоких скоростях.
За счет высокой скорости, относительно малого ресурса работы и повышенного шума универсальные двигатели имеют сравнительно низкую удельную стоимость (на единицу мощности).


Тахогенераторы постоянного тока
Тахогенератором называют электрический тахометр, служащий для преобразования механической скорости в электрическое напряжение.
Выходом тахогенератора является напряжение на зажимах якоря, пропорциональное скорости его вращения. Кроме изменений скорости, тахогенератор может быть использован как элемент автоматической системы управления, например, для обеспечения обратной связи по скорости.
Тахогенератор постоянного тока представляет собой маломощный коллекторный генератор. Для обеспечения постоянства рабочего магнитного потока тахогенераторы выполняют с независимым возбуждением или с возбуждением от постоянных магнитов.
Коллектор тахогенератора имеет большее число коллекторных пластин, чем у генератора общего применения. При этом пульсации выходного напряжения уменьшаются.
Зависимость напряжения на зажимах тахогенератора от скорости принято называть выходной характеристикой. Для обеспечения линейности выходной характеристики рабочий поток должен быть строго постоянным при всех режимах работы.
Чтобы устранить температурное влияние, тахогенераторы выполняют с возбуждением от постоянных магнитов, или, если возбуждение электромагнитное, магнитопровод делают сильно насыщенным.
Тогда колебания тока возбуждения вследствие температурных изменений сопротивления обмотки возбуждения не оказывают заметного влияния на поток возбуждения.
Однако при наличии тока в цепи якоря рабочий поток несколько уменьшается из-за размагничивающего действия реакции якоря, и линейность выходной характеристики нарушается. Этот эффект проявляется тем сильнее, чем меньше сопротивление нагрузки.
Падение напряжения в щеточном контакте вызывает смещение выходной характеристики относительно начала координат, так что имеет место так называемая мертвая зона тахогенератора в пределах которой выходное напряжение равно нулю.
Для уменьшения мертвой зоны в тахогенераторах применяют щетки с малым падением напряжения на контактах.
«
Подписывайтесь на наши каналы в Telegram:
Школа для электрика и Электрика, электромонтажные работы
Асинхронные двигатели
Однофазный асинхронный двигатель структурно напоминает асинхронный двигатель с короткозамкнутой обмоткой ротора, но имеет однофазную обмотку статора. В большинстве случаев обмотку статора выполняют распределенной так, чтобы обеспечить синусоидальное распределение магнитодвижущей силы (МДС).
Однофазные асинхронные двигатели классифицируют и называют по способу пуска. Двигатели выбирают по требуемым моментам при пуске и установившейся работе, а также по токам, потребляемым двигателями из сети.
Двигатель с расщепленной фазой питается от однофазной сети и имеет главную и вспомогательную обмотки, оси которых смещены в пространстве на 90°. Вспомогательная обмотка имеет большее отношение активного сопротивления к реактивному, чем главная обмотка, так что их токи находятся не в фазе.
В результате в зазоре машины создастся вращающееся эллиптическое поле и возникает пусковой момент. Но достижении двигателем 0,7 - 0,8 синхронной скорости вспомогательная обмотка, называемая обычно пусковой, отключается с помощью центробежного выключателя или реле.
Повышенное активное сопротивление пусковой обмотки получают, выполняя ее более тонким проводом или вводя в ее цепь добавочный резистор.
Двигатели с расщепленной фазой имеют небольшой пусковой момент при низких пусковых токах.
Разновидностью двигателя с расщепленной фазой является двигатель с пусковым конденсатором (конденсаторный двигатель).
Фазовый сдвиг между токами обмоток здесь обеспечивается с помощью конденсатора, включенного последовательно с пусковой обмоткой. После разгона двигателя пусковая обмотка отключается.
Наилучшим с точки зрения пускового момента, пускового тока и стоимости является фазовый угол между токами несколько меньше 90°. Его моментно-скоростная характеристика отличается высоким пусковым моментом.
В двигателе с рабочим конденсатором вспомогательная обмотка после пуска не отключается. При этом конструкция двигателя из-за отсутствия выключателя упрощается, а КПД улучшается.
Вспомогательная обмотка и конденсатор могут быть рассчитаны из условия идеальной двухфазной работы при заданной нагрузке. Обратное поле в этом случае исчезает, поэтому устраняются пульсации момента с двойной частотой и уменьшаются шумы. Пусковой момент двигателя мал.
Получить оптимальные рабочие и пусковые свойства можно, если использовать два конденсатора, один для пуска, другой - рабочий.
Конденсатор малой емкости, необходимый для оптимизации установившейся работы, постоянно включен последовательно с вспомогательной обмоткой. На период пуска параллельно этому конденсатору подключается конденсатор большей емкости.
Асинхронный двигатель с экранированными полюсами имеет явно выраженные полюса, причем часть каждого полюса окружена короткозамкнутым медным кольцом, называемым экраном.
Ток, наводимый в экране, вызывает отставание потока этой части полюса от остального потока. В результате создастся вращающееся поле эллиптической формы и небольшой пусковой момент. КПД таких двигателей невысок.
Исполнительные асинхронные двигатели автоматических устройств
Асинхронные микродвигатели благодаря их конструктивной простоте и надежности широко применяются в качестве исполнительных двигателей систем автоматики, обеспечивая скорость вращения, пропорциональную сигналу управления.
Асинхронный исполнительный двигатель имеет две обмотки на статоре, смещенные на 90°, и короткозамкнутый ротор.
Одна из обмоток статора постоянно подключена к питающей сети и называется обмоткой возбуждения.
Питание второй обмотки, называемой обмоткой управления, осуществляется через блок управления, посредством которого можно изменять подводимое к обмотке управления напряжение. Частоты подводимых к обеим обмоткам напряжений одинаковы.
Используют различные способы управления асинхронными исполнительными двигателями. Особенность так называемого амплитудного управления состоит в следующем.
Прикладываемые к обмоткам возбуждения и управления напряжения должны быть смещены относительно друг друга по фазе на 90°. Это смещение можно обеспечить либо с помощью блока управления, либо путем включения конденсатора последовательно с обмоткой возбуждения.
Управление двигателем производится изменением амплитуды напряжения на обмотке управления.
Когда к обмотке управления прикладывается полное напряжение, в зазоре создастся вращающееся круговое поле и скорость двигателя становится наибольшей. Если, напротив, напряжение на обмотке управления равно нулю, поле в зазоре пульсирующее, как в однофазном двигателе, и ротор не вращается.
Во избежание самохода (т. е. вращения двигателя при отсутствии напряжения на обмотке управления) активное сопротивление короткозамкнутого ротора выбирают относительно большим. Тогда обеспечивается эффективное торможение двигателя после снятия напряжения с обмотки управления.
Асинхронные двигатели с короткозамкнутым ротором наиболее экономичны при работе с малыми скольжениями и потому предпочтительны в приводах постоянной скорости.
Они имеют ряд других достоинств, благодаря которым находят широкое применение в системах автоматического управления.
Достоинством асинхронных исполнительных двигателей является жесткость и простота конструкции ротора и отсутствие щеточных контактов.
Асинхронные тахогенераторы
В системах автоматического управления с обратными связями часто бывает необходимо измерять угловую скорость вала, причем желательно, чтобы измеряемый электрический сигнал имел вид напряжения переменного тока постоянной частоты. Для этой цели может быть использована двухфазная асинхронная машина, называемая асинхронным тахогенератором.
Вращающиеся трансформаторы
В системах автоматики широко применяются вращающиеся (поворотные) трансформаторы, которые служат для получения напряжения, пропорционального углу поворота ротора, а также синусу и косинусу этого угла.
Сельсины
Сельсины используют в системах автоматического управления для обеспечения синхронного вращения двух или нескольких механически не связанных между собой валов (осей), передами информации об угловом положении вала и выполнения арифметических операций с углами.
Сельсины являются индукционными устройствами, аналогичными асинхронным машинам. Свое название они получили за способность самосинхронизации.
Трехфазный сельсин имеет трехфазную обмотку на роторе, называемую обмоткой возбуждения, и трехфазную статарную обмотку синхронизации. Сельсины малой мощности выполняются с однофазной обмоткой возбуждения и называются однофазными.
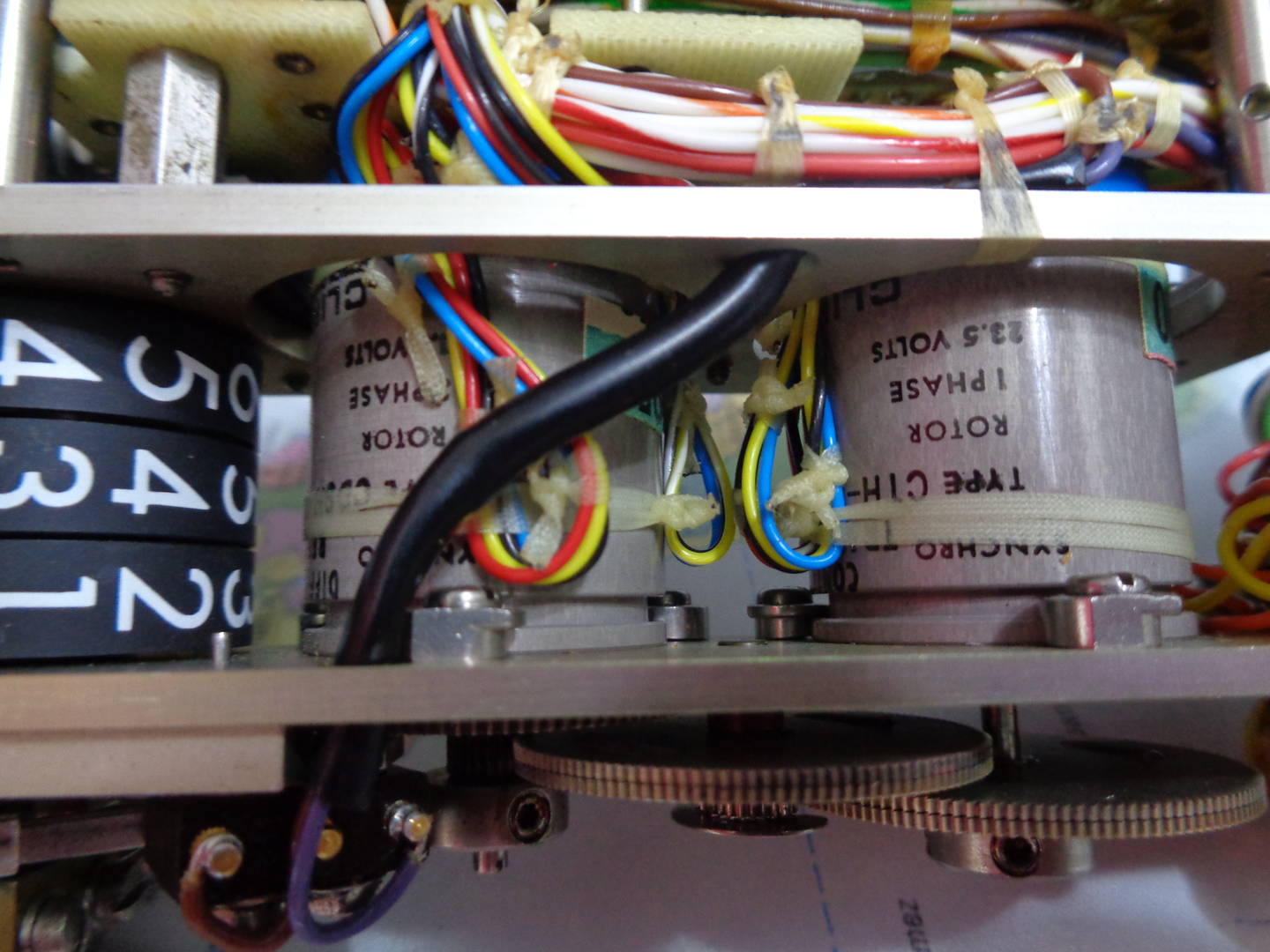
Простейшая система синхронной передачи состоит из двух одинаковых сельсинов, один из которых является датчиком, второй — приемником. Трехфазные обмотки синхронизации датчика и приемника соединены между собой. Обмотки возбуждения подключены к источнику переменного напряжения через контактные кольца и щетки.
Один сельсин-датчик способен работать с несколькими сельсинами-приемниками. При этом обмотки синхронизации всех сельсинов соединяются параллельно, а обмотки возбуждения питаются от общего источника напряжения.
Конструктивно сельсины напоминают двигатели малой мощности. Сердечники статора и ротора выполняются шихтованными. Ротор сельсина-приемника обычно снабжен демпфером, служащим для гашения механических колебаний.
Синхронные реактивные двигатели
Синхронный реактивный двигатель представляет собой синхронную машину с ротором однополюсной конструкции, который не имеет обмотки возбуждения или постоянных магнитов.
При установившемся вращении ротора электромагнитный момент одного направления возникает вследствие наличия в воздушном зазоре поля реакции якоря - отсюда название реактивного двигателя.
Конструкция ротора реактивного двигателя может быть различной. Так. если часть зубцов ротора асинхронного короткозамкнутого двигателя удалить, оставляя стержни и короткозамыкающие кольца «беличьей клетки» нетронутыми, то ротор приобретет магнитную асимметрию и окажется пригодным для использования в реактивном двигателе.
Разумеется, что в промышленно изготовляемых реактивных двигателях находят применение роторы более совершенных конструкций.
Статор трехфазного реактивного двигателя аналогичен статору асинхронного двигателя и имеет распределенную или сосредоточенную обмотку.
Синхронный реактивный двигатель пускают в ход как асинхронный, т. е. прямым включением. При небольшой нагрузке на валу двигатель, имеющий короткозамкнутую обмотку того или иного вида на роторе, разгоняется под действием асинхронного момента и работает первоначально с небольшим скольжением.
Синхронные реактивные двигатели по КПД и коэффициенту мощности аналогичны асинхронным и применяются в тех случаях, когда при относительно стабильной нагрузке требуется постоянная скорость вращения.
Гистерезисные двигатели
Для создания вращающего момента можно использовать явление гистерезиса. Ротор гистерезисного двигателя в его простейшей форме представляет собой цилиндр из магнитотвердого материала без пазов и обмотки. Обычно в целях экономии дорогостоящего магнитотвердого сплава ротор выполняют сборным.
Он состоит из сплошного или шихтованного цилиндра из магнитотвердого материала, насаженного на втулку.
В пазах сердечника статора помещается распределенная обмотка, спроектированная так, чтобы создаваемое ею магнитное поле имело распределение в воздушном зазоре как можно более близкое к синусоидальному. Отклонение поля от синусоидального резко увеличивает потери мощности.
Однофазный двигатель имеет расщепленную обмотку статора с постоянно включенным конденсатором, который выбран таким, что в зазоре создастся круговое вращающееся поле.

Шаговые двигатели
Шаговый двигатель представляет собой разновидность синхронного двигателя и предназначен для поворота вала на определенный угол при каждом управляющем электрическом импульсе.
Статор шагового двигателя многополюсный, снабжен сосредоточенной или распределенной обмоткой, напоминающей обмотки обычных электрических машин. Число полюсов статора определяется требуемым углом поворота ротора на один импульс.
Ротор шагового двигателя имеет явно выраженные полюса и может выполняться с обмоткой возбуждения или постоянными магнитами. Используются также роторы реактивного типа, т. е. не имеющие возбуждения. Двухполюсной ротор четырехфазного шагового двигателя выполнен с постоянным магнитом.
Достоинствами шаговых двигателей являются относительно малые размеры и стоимость. Современные конструкции позволяют делать до 200 шагов в секунду без потери шага при внезапных остановках и пусках.
Шаговые двигатели применяются в разомкнутых системах автоматического управления как исполнительные двигатели, в робототехнике, ракетной технике и т. д.
Смотрите также по этой теме: