

Асинхронные исполнительные двигатели используют в системах автоматического управления для управления и регулирования различных устройств.
Асинхронные исполнительные двигатели начинают действовать при подаче им электрического сигнала, который они преобразуют в заданный угол поворота вала или в его вращение. Снятие сигнала приводит к немедленному переходу ротора исполнительного двигателя в неподвижное состояние без использования каких-либо тормозных устройств. Работа таких двигателей протекает все время в условиях переходных режимов, в результате чего скорость ротора зачастую при кратковременном сигнале не достигает установившегося значения. Этому способствуют также частые пуски, изменения направления вращения и остановки.
По конструктивному оформлению исполнительные двигатели представляют собой асинхронные машины с двухфазной обмоткой статора, выполненной так, что магнитные оси ее двух фаз сдвинуты в пространстве относительно друг друга не угол 90 эл. град.
Одна из фаз обмотки статора является обмоткой возбуждении и имеет выводы к зажимам с обозначение ми C1 и С2. Другая, выполняющая роль обмотки управления, имеет выводы, присоединенные к зажимам с обозначениями У1 и У2.
К обеим фазам обмотки статора подводят соответствующие переменные напряжения одинаковой частоты. Так, цепь обмотки возбуждения присоединяют к питающей сети с неизменным напряжением U, а в цепь обмотки управления подают сигнал в виде напряжения управления Uу (рис. 1, а, б, в).
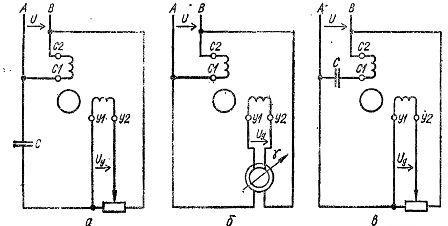
Рис. 1. Схемы включения асинхронных исполнительных двигателей при управлении: а - амплитудном, б - фазовом, в - амплитудно-фазовом.
В результате этого в обеих фазах обмотки статора возникают соответствующие токи, которые благодаря включенным фазосдвигающим элементам в виде конденсаторов или фазорегулятора сдвинуты относительно друг друга во времени, что приводит к возбуждению эллиптического вращающего магнитного поля, которое вовлекает короткозамкнутый ротор во вращение.
 При изменении режимов работы двигателя эллиптическое вращающееся магнитное поле в предельных случаях переходит в переменное с неподвижной осью симметрии или в круговое вращающееся, что сказывается на свойствах двигателя.
При изменении режимов работы двигателя эллиптическое вращающееся магнитное поле в предельных случаях переходит в переменное с неподвижной осью симметрии или в круговое вращающееся, что сказывается на свойствах двигателя.
Пуск, регулирование скорости и остановка исполнительных двигателей определяются условиями формирования магнитного поля путем амплитудного, фазового и амплитудно-фазового управления.
При амплитудном управлении напряжение U на зажимах обмотки возбуждения поддерживают неизменным, а изменяют только амплитуду напряжения Uy. Сдвиг фаз между этими напряжениями, благодари исключенному конденсатору, равен 90° (рис. 1, а).
Фазовое управление харакрно тем, что напряжения U и Uy остаются неизменными, а сдвиг фаз между ними регулируют поворотом ротора фазорегулятора (рис. 1, б).
При амплитудно-фазовом управлении, хотя регулируют только амплитуду напряжения Uy, но при этом, из-за наличия конденсатора в цепи возбуждения и электромагнитного взаимодействия фаз обмотки статора, происходит одновременное изменение фазы напряжения на зажимах обмотки возбуждения и сдвига фаз между этим напряжением и напряжением на зажимах обмотки управления (рис. 1, в).
Иногда кроме конденсатора в цепи обмотки возбуждения предусматривают еще конденсатор в цепи обмотки управления, что компенсирует реактивную намагничивающую мощность, снижает потери энергии и улучшает, механические характеристики асинхронного исполнительного двигателя.
При амплитудном управлении круговое вращающееся магнитное поле наблюдается при номинальном сигнале независимо от скорости ротора, а при уменьшении его оно становится эллиптическим. В случае фазового управления круговое вращающееся магнитное поле возбуждается только при номинальном сигнале и сдвиге фаз между напряжениями U и Uy равным 90° независимо от скорости ротора, а при ином сдвиге фаз оно становится эллиптическим. При амплитудно-фазовом управлении круговое вращающееся магнитное поле существует только при одном режиме — при номинальном сигнале в момент пуска двигателя, а затем по мере разгона ротора оно переходит в эллиптическое.
При всех способах управления скорость ротора регулируют изменением характера вращающегося магнитного поля, а перемену направления вращения ротора осуществляют изменением фазы напряжения, подведенного к зажимам обмотки управления, на 180°.
 К асинхронным исполнительным исполнительным двигателям предъявляют специфические требования в части отсутствия самохода, обеспечения широкого диапазона регулирования скорости ротора, быстродействия, большого начального пускового момента и малой мощности управления при относительном сохранении линейности их характеристик.
К асинхронным исполнительным исполнительным двигателям предъявляют специфические требования в части отсутствия самохода, обеспечения широкого диапазона регулирования скорости ротора, быстродействия, большого начального пускового момента и малой мощности управления при относительном сохранении линейности их характеристик.
Самоход асинхронных исполнительных двигателей проявляется в виде самопроизвольного вращения ротора при отсутствии сигнала управления. Он обусловлен либо недостаточно большим активным сопротивлением обмотки ротора — методический самоход, либо некачественным исполнением самого двигателя — технологический самоход.
Первый устраним при проектировании двигателей, предусматривающем изготовление ротора с повышенным сопротивлением обмотки и критическим скольжением sкр = 2 - 4, что, кроме того, обеспечивает широкий устойчивый диапазон регулирования скорости ротора, а второй — качественным изготовлением магнитопроводов и обмоток машин при тщательной их сборке.
Так как асинхронные исполнительные двигатели с ротором, имеющим короткозамкнутую обмотку с повышенным активным сопротивлением, отличаются небольшим быстродействием, характеризуемым электромеханической постоянной времени — временем набора ротором скорости от нулевой до половины синхронной — Тм = 0,2 - 1,5 с, то в установках автоматического управления предпочтение отдают исполнительным двигателям с полым немагнитным ротором, у которых электромеханическая постоянная времени имеет меньшее значение — Тм = 0,01 - 0,15 с.
Асинхронные исполнительные двигатели с полым немагнитным ротором, отличающиеся высоким быстродействием, имеют как внешний статор с магнитопроводом обычной конструкции и двухфазной обмоткой с фазами, выполняющими роль обмоток возбуждения и управления, так и внутренний статор в виде шихтованного ферромагнитного полого цилиндра, укрепленного на подшипниковом щите двигателя.
Поверхности статоров разделены воздушным зазором, который в радиальном направлении имеет размер 0,4 - 1,5 мм. В воздушном зазоре находится стакан из алюминиевого сплава со стенкой толщиной 0,2 - 1 мм, укрепленный на валу двигателя. Ток холостого хода асинхронных двигателей с полым немагнитным ротором велик и доходит до 0,9Iном, а номинальный кпд = 0,2 - 0,4.
В установках автоматики и телемеханики применяют двигатели с полым ферромагнитным ротором, у которого толщина стенки 0.5 - 3 мм. В этих машинах, используемых в качестве исполнительных и вспомогательных двигателей, внутренний статор отсутствует, а ротор укреплен на одной запрессованной или двух торцовых металлических пробках.
 Воздушный зазор между поверхностями статора и ротора в радиальном направлении составляет всего 0,2 - 0,3 мм.
Воздушный зазор между поверхностями статора и ротора в радиальном направлении составляет всего 0,2 - 0,3 мм.
Механические характеристики двигателей с полым ферромагнитным ротором ближе к линейным, чем характеристики двигателей с ротором, имеющим обычную короткозамкнутую обмотку, а также с ротором, выполненным в виде полого немагнитного цилиндра.
Иногда внешнюю поверхность полого ферромагнитного ротора покрывают слоем меди толщиной 0,05 - 0,10 мм, а его торцовые поверхности — слоем меди до 1 мм для увеличения номинальных мощности и момента двигателя, однако кпд его при этом несколько уменьшается.
Существенными недостатками двигателей с полым ферромагнитным ротором является одностороннее прилипание ротора к магнитопроводу статора из-за неравномерности воздушного зазора, чего не бывает в машинах с полым немагнитным ротором. Самоход у двигателей с полым ферромагнитным ротором отсутствует, они устойчиво работают в диапазоне скоростей от нулевой до синхронной скорости ротора.
Асинхронные исполнительные двигатели с массивным ферромагнитным ротором выполненным в виде стального или чугуного цилиндра без обмотки, отличаю простотой конструкции, высокой прочностью, большим пусковым моментом, устойчивостью работы на заданной скорости и могут быть использованы при очень высоких скоростях ротора.
Существуют обращенные двигатели с массивным ферромагнитным ротором, который выполнен в вид наружной вращающейся части.
Асинхронные исполнительные двигатели изготавливают на номинальную мощность от долей до нескольких сотен ватт и предназначают для питания от источников переменного напряжения с частотой 50 Гц, а также повышенных частот до 1000 Гц и выше.
Читайте также: Сельсины: назначение, устройство, принцип действия