

 Из всех видов двигателей асинхронные двигатели получили наиболее широкое распространение в промышленности и продолжают вытеснять все больше и больше двигатели постоянного тока.
Из всех видов двигателей асинхронные двигатели получили наиболее широкое распространение в промышленности и продолжают вытеснять все больше и больше двигатели постоянного тока.
Асинхронные двигатели получили широкое распространение благодаря следующим своим качествам: дешевизне двигателя, простоте конструкции, надежности, высокому к. п. д. До настоящего времени асинхронные двигатели уступали место двигателям постоянного тока только в тех случаях, где требовалось плавное регулирование частоты вращения (строгальные станки, правильные машины, регулируемые главные приводы прокатных станов и т. п.), в электрическом транспорте и в приводах большой мощности повторно-кратковременного режима (реверсивные станы). Внедрение в промышленность регулируемых преобразователей частоты позволит, еще шире применять асинхронные двигатели.
Недостатками асинхронных двигателей являются:
1) Квадратичная зависимость момента от напряжения, при падении напряжения в сети сильно уменьшаются пусковой и критический моменты,
2) Опасность перегрева статора, особенно при повышениях напряжения сети, и ротора при понижении напряжения,
3) Малый воздушный зазор, несколько понижающий надежность двигателя,
4) Большие пусковые токи асинхронных двигателей. При пуске асинхронного двигателя с короткозамкнутым ротором ток статора больше номинального в 5 - 10 раз. Такие большие токи в статоре недопустимы по условиям динамических усилий в обмотках и нагрева обмоток. В асинхронных двигателях могут возникать переходные режимы с большими бросками тока не только при подключении двигателя к сети но и при его реверсе и торможении.
Итак, для чего нужно ограничивать пусковой ток в обмотках статора асинхронного электродвигателя с короткозамкнутым ротором?
Необходимость ограничения тока двигателей диктуется причинами электрического и механического характера. Причины электрического характера ограничения тока двигателей могут быть следующие:
1) Уменьшение толчков тока в сети. В некоторых случаях для крупных двигателей требуется ограничить пусковой ток до допускаемого для питающей системы.
2) Уменьшение электродинамических усилий в обмотках двигателя.
Уменьшение толчков тока в сети требуется обычно при пуске крупных асинхронных двигателей с короткозамкнутым ротором, если они получают питание от сравнительно маломощной питающей системы. Кроме того, для крупных двигателей заводы-изготовители машин не разрешают прямой пуск из-за чрезмерно больших электродинамических усилий в лобовых частях обмоток статора и ротора.
Причины механического характера ограничения момента двигателей могут быть самыми разнообразными, например предотвращение поломки или быстрого изнашивания передач, соскальзывания ремней со шкивов, буксования колес подвижных тележек, больших ускорений или замедлений, недопустимых для оборудования или людей в различных средствах передвижения и т. д. Иногда требуется уменьшить пусковой момент двигателей, даже небольших, для того чтобы смягчить удары в передачах и обеспечить плавное ускорение.
Во всех случаях, где условия работы не требуют форсированных ускорений или замедлений, желательно рассчитывать режимы на минимальные броски тока, а следовательно, и момента, сохраняя этим передачи механизма и двигатель.

Устройство плавного пуска двигателя
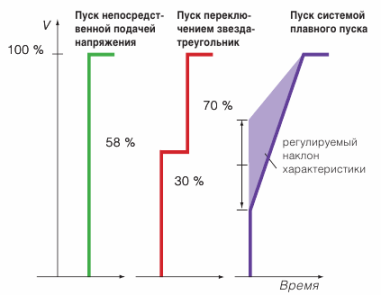
Для ограничения тока применяются пусковые реакторы, резисторы и автотрансформаторы, а также современные электронные устройства - софт-стартеры (устройства плавного пуска двигателей).
Напряжение на электродвигателе

Ток электродвигателя
Необходимо обратить внимание на то, что ограничение тока и момента с помощью устройств плавного пуска двигателей получается за счет усложнения схемы управления и удорожания установки, а потому должно применяться только там, где это обосновано.
В продолжение этой темы: Как правильно выбрать устройство плавного пуска (УПП)