

Электрооборудование современных промышленных механизмов, в том числе и станкостроительных отраслей, включает целый комплекс различных систем:
- электроприводы подачи, главного двигателя и вспомогательных механизмов;
- силовое электрооборудование; различного рода датчики, измерительные и регистрирующие устройства;
- устройства программного управления и цифровой индикации, как правило, выполненные на базе микро-ЭВМ;
- периферийное оборудование ввода и вывода информации;
- устройства электроавтоматики, осуществляющие управление и координацию работы механизмов.
Устройства электроавтоматики на основе информации, заданной управляющим устройством более высокого уровня или оператором, и информации о фактическом состоянии механизма, получаемой от датчиков, формируют управляющие воздействия на исполнительные элементы — электроприводы, электромагнитные муфты, электромагниты управления гидравлическими золотниками и т. д.
Входные и выходные сигналы, и сами электроавтоматические устройства могут быть двух видов: аналоговые (непрерывные) и дискретные.
В настоящей статье рассматриваются дискретные станочные электроавтоматические устройства, наиболее широко применяемые в промышленности.

Для успешного синтеза дискретных устройств электроавтоматики необходимо решить следующие основные задачи:
1. Определить способ графической формализации условий работы промышленного механизма или какой-либо типовой схемы вычислительной техники.
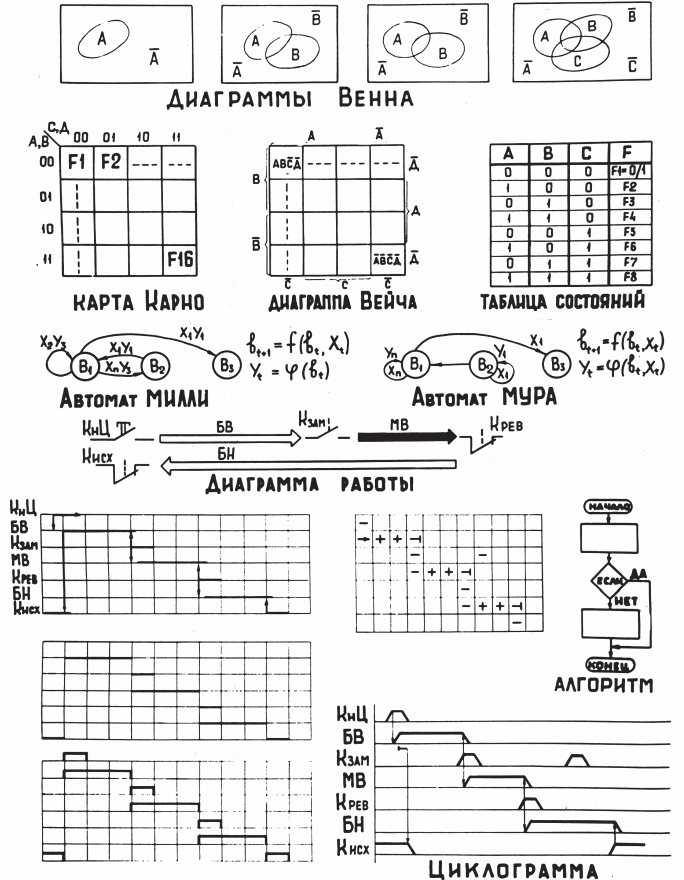
Критериями выбора являются простата и наглядность отображения реальных процессов, удобство математического анализа. Применяют диаграммы Венна и Вейча, карты Карно, таблицы состояний, графы автоматов Милли и Мура, диаграммы и циклограммы работы, классические структурные алгоритмы и др.
2. Выбрать математический аппарат, позволяющий описать принятые способы графической формализации условий работы. Обычно это алгебра логики и теория дискретных автоматов.
3. Выбрать элементную базу и способ реализации. Применяют жесткие и гибкие структуры реализации электроавтоматики.
Жесткие структуры выполняются в релейно-контактном или бесконтактном варианте, гибкие структуры — на программируемых логических матрицах (ПЛМ), программируемых логических контроллерах (ПЛК), фоновых контроллерах встроенных в устройство ЧПУ, на базе персональных компьютеров (ПК).
4. Выбрать метод минимизации и приведения полученных логических уравнений, описывающих работу синтезируемого устройства, к принятой элементной базе. Здесь применяют законы алгебры логики, методы матриц Карно, Квайна, Мак-Клакси, теории автоматов и др.
Способы графической формализации работы электроавтоматики
Выбор метода формализации и синтеза, как правило, субъективен, во многом зависит от первоначальных привязанностей конструктора, традиций и школы коллектива, в котором он работает, и других факторов.
Многолетний опыт автора и анализ технической литературы позволяет сделать следующие выводы.
Диаграммы Венна носят чисто иллюстративный теоретический характер познаний первых шагов в мире логической алгебры; метод матриц (или карт) Карно практически неприемлем при числе логических переменных более пяти, дальнейшее его совершенствование — методы Квайна и Мак-Клакси — также приемлемы лишь при ограниченном числе логических переменных, что однозначно признается в публикациях по данной тематике.
Заметим, что реальные промышленные механизмы имеют десятки и сотни логических переменных (входных и выходных сигналов).
Во многих случаях (синтез шифраторов, дешифраторов, преобразователей кодов, сумматоров и т. д.) очень удобны таблицы состояний, ввиду простоты и наглядности.
Теория дискретных автоматов позволяет решить любую задачу, однако она очень сложна и трудоемка, требует высоких и постоянных профессиональных навыков и в практической инженерной деятельности конструкторских бюро промышленных предприятий также малопригодна.
Наиболее полно требованиям простоты и наглядности, возможности непосредственного использования математического аппарата алгебры логики отвечают циклограммы, и в наибольшей степени в начертании, используемом при описании работы средств микропроцессорной техники.
Видно, что подобная циклограмма представляет собой развернутую во времени картину работы механизма, четко определяет время действия любого входного, промежуточного или выходного сигнала, при этом учитываются фронты сигналов, временные задержки, любые начальные условия и блокировки и т. д.
Данный способ графической формализации в сочетании с использованием аппарата алгебры логики хорошо зарекомендовал себе на практике, позволил за короткое время подготовить большое число высококвалифицированных специалистов в области станочной дискретной электроавтоматики.
Что касается способов реализации электроавтоматических устройств, то безусловное предпочтение следует отдать применению гибких перепрограммируемых структур, в большей части выполняемых на программируемых логических контроллерах (ПЛК). Гибкие структуры позволяют осуществлять оперативную настройку системы управления на разные условия работы.
«
Подписывайтесь на наши каналы в Telegram:
Школа для электрика и Электрика, электромонтажные работы
Ниже на рисунке показаны основные этапы процесса проектирования электроавтоматики при использовании жесткой и гибкой структуры.
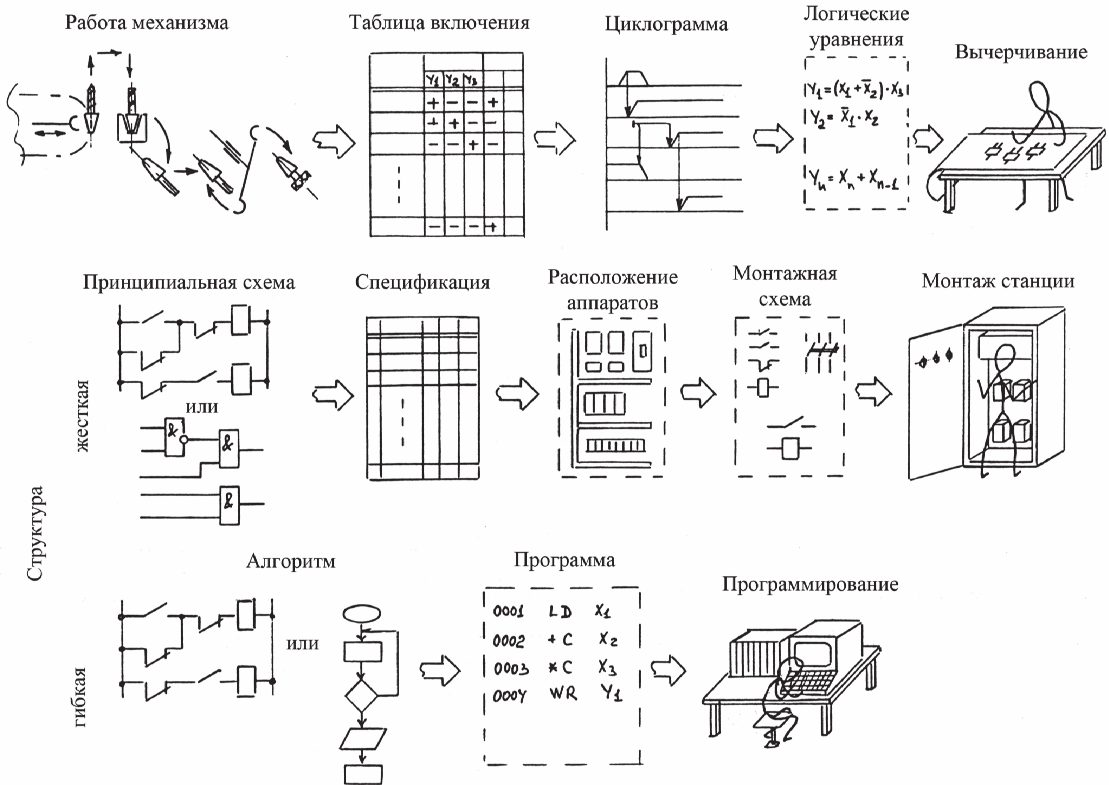
Этапы проектирования электроавтоматики
Видно, что при применении ПЛК, по сравнению с использованием жестких структур, исключается большой объем работ, связанных с выбором и специфицированием электрических аппаратов используемой элементной базы, разработкой конструкций блоков, размещением и крепежом аппаратуры в электрошкафу, составлением сложных монтажных схем, так как большая часть этой рутиной работы заменяется составлением алгоритмов и программированием.
Работы, связанные с программированием, могут выполняться параллельно и независимо от процесса изготовления электрооборудования в производстве, что сокращает срок его внедрения и является одним из важнейших преимуществ ПЛК.
Из этого не следует, что разработка конструкций, составление спецификаций и вычерчивание монтажных схем исключается полностью. Эти работы выполняют, однако их объем и сложность сводятся к минимуму.
Кроме того, применение ПЛК обеспечивает большие функциональные и диагностические возможности, более высокие показатели надежности, сокращение сроков проектирования.
Итак, ПЛК дают возможность создавать высокоэффективные устройства управления промышленными механизмами с малыми затратами на проектирование, отладку и эксплуатацию.
Метод синтеза электроавтоматических устройств на основе циклограмм и математического аппарата алгебры логики полностью пригоден при использовании в качестве элементной базы программируемых логических контроллеров.
Чернов Е. А. Программирование ПЛК