

В этой статье представлена краткая история развития систем автоматического управления с обратной связью. Термин «автоматическое» означает, что управление происходит без участия человека. Понятие «обратная связь» впервые, по-видимому, было использовано в 1920 году сотрудниками компании Bell Telephone Laboratories.
Обратная связь является ключевым элементом в системах автоматизации, позволяя поддерживать стабильность и эффективность работы различных процессов.
В общем понимании, обратная связь представляет собой механизм, при котором выходной сигнал системы возвращается на вход для корректировки её работы. Это может быть как положительная, так и отрицательная обратная связь.
Положительная обратная связь увеличивает выходной сигнал, что может привести к ускорению процессов, но также и к нестабильности системы. Например, в некоторых случаях это может вызвать автоколебания, когда система начинает "разгоняться" сама по себе.
Отрицательная обратная связь уменьшает выходной сигнал, что способствует стабилизации системы. Это позволяет поддерживать выходные значения в заданном диапазоне, что особенно важно в автоматизированных системах регулирования.
Системы автоматического управления с обратной связью играют важную роль в различных областях техники и науки. Они позволяют поддерживать стабильность и точность работы различных устройств и процессов. История их развития показывает, как постепенно совершенствовались методы и подходы к автоматическому управлению, начиная с простейших механических устройств и заканчивая сложными электронными системами.

Самое раннее известное автоматическое устройство с обратной связью относится ко второму веку до нашей эры. Это водяные часы, которые использовались для измерения времени с помощью капель воды, падающих с постоянной скоростью через сопло, соединённое с резервуаром.
Это устройство имеет интересную особенность — для того чтобы обеспечивать стабильную скорость истечения воды, необходимо было поддерживать постоянный уровень воды в резервуаре, что требовало автоматического регулирования. Для этого существовали механизмы, которые автоматически следили за уровнем воды, добавляя или уменьшая её количество по мере необходимости.
Интересно, что задача поддержания стабильного уровня жидкости в сосуде, возникшая ещё в древности, продолжает оставаться актуальной и в наши дни. Современные инженеры продолжают разрабатывать системы, которые могут регулировать уровень воды в различных устройствах и установках.
Один из вариантов водяных часов имеет конструкцию с плавающим клапаном, который выполняет функции как датчика, так и исполнительного устройства.
Когда уровень воды в сосуде достигает заранее установленного значения, клапан закрывает подводящий канал, тем самым прекращая поступление воды. Если же уровень воды становится ниже нужного, клапан открывается, позволяя воде поступать в сосуд. Это принципиально схоже с устройством сливного бачка в туалетах, который также автоматически регулирует уровень воды.
Процесс измерения времени с помощью капающей воды очень прост, но чрезвычайно эффективен. Вода, капающая через сопло, поступает в нижний сосуд, оснащённый проградуированной шкалой. Эта шкала позволяет точно измерять время, прошедшее с момента того, как сосуд был пуст.
Накапливающаяся в сосуде вода фактически выполняет операцию интегрирования, или суммирования, накопления значений за определённый промежуток времени. Это аналогично тому процессу, который используется в численных методах интегрирования в современных цифровых компьютерах.
Такой принцип работы устройств был использован уже более 2200 лет назад, и именно на основе этого принципа функционируют современные вычислительные машины. Следовательно, можно сказать, что современные компьютерные системы основаны на принципах, которые были разработаны ещё в эпоху античности.
Этот принцип использовался не только в водяных часах. Многие изобретатели на протяжении веков совершенствовали и расширяли возможности различных регуляторов и контроллеров.
Голландский механик и химик Корнелиус Дреббель (1572–1633) изобрёл регулятор температуры, который использовался для регулирования температуры в химических лабораториях и инкубаторах. Он создал систему, которая автоматически выпускала нагретый воздух, как только температура в камере достигала нужного уровня.
Этот регулятор был предшественником современных систем, используемых для автоматического поддержания температуры в жилых помещениях. Такие системы автоматически включают циркуляцию воздуха, когда температура снижается ниже установленного значения. Это упрощает поддержание комфортной температуры без необходимости постоянного вмешательства человека.
Американский изобретатель Уильям Генри (1729–1786) предложил свою версию регулятора температуры, использующую заслонку, которая автоматически управляла сгоранием топлива, а значит, и уровнем температуры в помещении.
Принцип его работы заключался в том, что при расширении нагретого воздуха заслонка закрывалась, ограничивая подачу топлива, а при сжатии воздуха заслонка открывалась, увеличивая подачу топлива и повышая температуру. Эта система представляла собой первый шаг к современным методам автоматического регулирования тепла и энергии.
Другие учёные и изобретатели также внесли значительный вклад в совершенствование технологий регулирования. Например, Джеймс Бриндли (1758), Саттон Томас Вуд (1784) и И. И. Ползунов (1763) усовершенствовали конструкции поплавковых регуляторов уровня жидкости. Эти устройства в конце XIX века широко использовались в водоснабжении, отоплении и различном промышленном оборудовании.
Одним из наиболее известных изобретений того времени был центробежный регулятор, разработанный Томасом Мидом в 1787 году, который использовался для контроля скорости ветряных мельниц и паровых машин.
В 1788 году Мэтью Болтон и Джеймс Уатт представили конструкцию центробежного регулятора скорости, в которой использовалась центробежная сила для регулировки подачи пара в паровую машину.
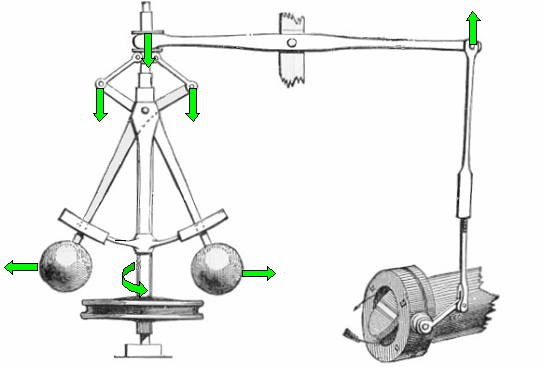
Центробежный регулятор
Центробежный регулятор скорости стал ключевым элементом для стабилизации работы паровых машин. Этот механизм, использующий центробежную силу для регулировки подачи пара, значительно улучшил производительность и надежность паровых двигателей.
Принцип действия регулятора заключается в следующем: два массивных шара вращались на валу паровой машины. Они были соединены с ползуном, который управлял клапаном, регулирующим подачу пара.
При увеличении скорости вращения вала шары расходились в стороны под действием центробежной силы, что приводило к уменьшению подачи пара и снижению скорости вращения. Если скорость уменьшалась, шары опускались, открывая клапан и увеличивая подачу пара на поршень двигателя.
Историческое значение этого изобретения трудно переоценить. Применение центробежного регулятора решило проблему нестабильной работы паровых машин, возникавшую из-за изменения нагрузки. Это позволило паровым машинам стать более предсказуемыми и эффективными, что способствовало их широкому распространению в промышленности.
Однако в процессе работы таких устройств возникала проблема колебаний, когда регуляторы не могли поддерживать постоянное значение выходной переменной и приводили к явлению, известному как «рыскание». Это означало, что система не могла точно регулировать нужное значение и часто выходила из равновесия.
Для устранения этого эффекта учёные стали разрабатывать математические модели, описывающие поведение таких физических систем. Математические уравнения, которые учитывают все переменные, стали основой для создания современных методов моделирования, анализа и синтеза систем управления.
Одним из важнейших вкладов в эту область стал математический инструмент, разработанный Пьером Симоном Лапласом (1749–1827). Преобразование Лапласа стало основой для анализа и синтеза систем управления и было принято в основу множества современных методов.
Кроме Лапласа, в развитие математического моделирования систем управления внесли свой вклад и другие учёные. Исаак Ньютон (1642–1727) значительно развил методы математического анализа, которые легли в основу научных вычислений и моделирования. Брук Тейлор, известный своими рядами Тейлора, также сыграл важную роль в создании инструментов для математического анализа.
Джеймс Клерк Максвелл (1831–1879) и Эдвард Джон Раус (1831–1907) расширили возможности математического моделирования, а Оливер Хевисайд (1850–1925) и Чарльз П. Штейнметц (1865–1923) развивали методы комплексных переменных и анализ частотных характеристик.
Гарри Найквист (1889–1976) и Хендрик У. Боде (1905–1982) внесли значительный вклад в развитие теории стабильности систем управления и диаграмм, таких как критерий Найквиста и диаграмма Боде. Гарольд С. Блэк (1898–1981) стал известен благодаря разработке усилителей с отрицательной обратной связью, которые широко применяются в современных системах.
Принцип работы цифровых компьютеров был в своё время разработан Джоном фон Нейманом (1903–1957), чьи идеи заложили основы для современной вычислительной техники.
Эти учёные и изобретатели заложили фундамент теории автоматического управления, которая продолжает активно развиваться и в наши дни. Хотя данный список не является исчерпывающим, он позволяет понять, как различные идеи и технологии эволюционировали на протяжении всей истории, и какой значительный вклад внесли выдающиеся учёные в развитие теории и практики автоматического управления.
Андрей Повный