

 Любая автоматическая система состоит из отдельных связанных между собой и выполняющих определенные функции конструктивных элементов, которые, принято называть элементами или средствами автоматики. С точки зрения функциональных задач, выполняемых элементами в системе, их можно разделить на воспринимающие, задающие, сравнивающие, преобразующие, исполнительные и корректирующие.
Любая автоматическая система состоит из отдельных связанных между собой и выполняющих определенные функции конструктивных элементов, которые, принято называть элементами или средствами автоматики. С точки зрения функциональных задач, выполняемых элементами в системе, их можно разделить на воспринимающие, задающие, сравнивающие, преобразующие, исполнительные и корректирующие.
Воспринимающие элементы или первичные преобразователи (датчики) измеряют управляемые величины технологических процессов и преобразовывают их из одной физической формы в другую (например, термоэлектрический термометр преобразует разность температур в термоЭДС).
Задающие элементы автоматики (элементы настройки) служат для задания требуемого значения регулируемой величины Хо. Именно этому значению должно соответствовать ее действительное значение. Примеры задающих устройств: механические задатчики, электрические задатчики, например, резисторы с переменным сопротивлением, переменные индуктивности и переключатели.
Сравнивающие элементы автоматики сопоставляют заданное, значение, управляемой величины Х0 с действительным значением X. Получаемый на выходе, сравнивающего элемента сигнал рассогласования ΔХ = Хо — X передается либо через усилитель, либо непосредственно на исполнительный элемент.

Преобразующие элементы осуществляют необходимые преобразования сигнала и его усиление в магнитных, электронных, полупроводниковых и других усилителях, когда мощность сигналов недостаточна для дальнейшего использования.
Исполнительные элементы создают управляющие воздействия на объект управления. Они изменяют количество энергии или вещества, подводимой к объекту управления или отводимой от него, для того чтобы управляемая величина соответствовала заданному значению.
Корректирующие элементы служат для улучшения качества процесса управления.
Кроме основных элементов в автоматических системах имеются и вспомогательные, к числу которых относятся переключающие устройства и элементы защиты, резисторы, конденсаторы и аппаратура сигнализации.
Все элементы автоматики независимо от их назначения обладают определенной совокупностью характеристик и параметров которые определяют их эксплуатационные и технологические особенности.
Основной из главных характеристик является статическая характеристика элемента. Она представляет собой зависимость выходной величины Хвых от входной Хвх в установившемся режиме, т.е. Хвых = f(Xвх). В зависимости от влияния знака входной величины различают нереверсивные (когда знак выходной величины во всем диапазоне изменения остается постоянным) и реверсивные статические характеристики (когда изменение знака входной величины приводит к изменению знака выходной величины).

Динамическая характеристика используется для оценки работы элемента в динамическом режиме, т. е. при быстрых изменениях входной величины. Ее задают переходной характеристикой, передаточной функцией, частотными характеристиками. Переходная характеристика представляет собой зависимость выходной величины Хвых от времени τ: Хвых = f (τ) — при скачкообразном изменении входного сигнала Хвх.
Коэффициент передачи можно определить по статической характеристике элемента. Различают три вида коэффициентов передачи: статический, динамический (дифференциальный) и относительный.
Статический коэффициент передачи Kст представляет собой отношение выходной величины Хвых к входной Хвх, т. е. Кст = Хвых/Хвх. Коэффициент передачи иногда называют коэффициентом преобразования. Применительно к конкретным конструктивным элементам статический коэффициент передачи называют также коэффициентом усиления (в усилителях), коэффициентом редукции (в редукторах), коэффициентом трансформации (в трансформаторах) и т. д.
Для элементов с нелинейной характеристикой используют динамический (дифференциальный) коэффициент передачи Кд, т. е. Кд = ΔХвых/ΔХвх.
Относительный коэффициент передачи Кот равен отношению относительного изменения выходной величины элемента ΔХвых/Хвых.н к относительному изменению входной величины ΔХвх/Хвх.н,
Кот = (ΔХвых/Хвых.н)/ΔХвх/Хвх.н,
где Хвых.н и Хвх.н — номинальные значения выходной и входной величин. Этот коэффициент является безразмерной величиной и удобен при сравнении элементов, различных по конструкции и принципу действия.

Порог чувствительности — наименьшее значение входной величины, при которой происходит заметное изменение выходной величины. Он вызывается наличием в конструкциях элементов трения без смазывающих материалов, зазоров и люфтов в соединениях.
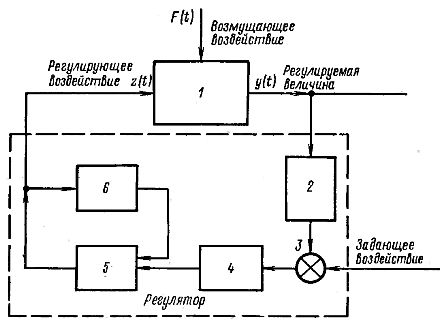
Особенностью автоматических замкнутых систем, в которых используется принцип управления по отклонению, является наличие обратной связи. Принцип действия обратной связи рассмотрим на примере системы управления температуры электрической нагревательной печи. Чтобы поддерживать температуру в заданных пределах, поступающее на объект управляющее воздействие, т. е. напряжение, подводимое, к нагревательным элементам, формируется с учетом значения температуры.
При помощи первичного преобразователя температуры выход системы соединяется с ее входом. Такое соединение, т. е. канал, информация по которому передается в обратном направлении по сравнению с управляющим воздействием, называют обратной связью.
Обратная связь бывает положительной и отрицательной, жесткой и гибкой, главной и дополнительной.
Положительной обратной связью называют связь, когда совпадают знаки воздействия обратной связи и задающего воздействия. В противном случае обратную связь называют отрицательной.
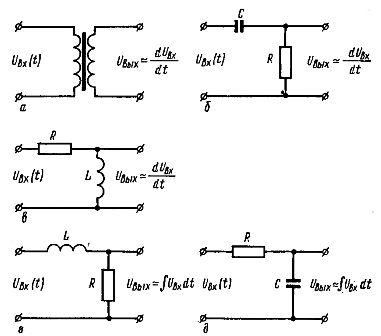
Схемы гибких обратных связей: а, б, в - дифференцирующих, г и д - интегрирующих
Если передаваемое воздействие зависит только от значения регулируемого параметра, т. е. не зависит от времени, то такую связь считают жесткой. Жесткая обратная связь действует как в установившемся, так и в переходном режимах. Гибкой обратной связью называют связь, действующую только в переходном режиме. Гибкая обратная связь характеризуется передачей по ней на вход первой или второй производной от изменения управляемой величины по времени. У гибкой обратной связи сигнал на выходе существует только тогда, когда управляемая величина изменяется во времени.
Главная обратная связь соединяет выход системы управления с ее входом, т. е. связывает управляемую величину с задающим устройством. Остальные обратные связи считают дополнительными или местными. Дополнительные обратные связи передают сигнал воздействия с выхода какого-либо звена системы на вход любого предыдущего звена. Они используются для улучшения свойств и характеристик отдельных элементов.