

 Значение регулируемой величины и характер ее изменения, как мы уже убедились, зависят от ряда факторов: задающего воздействия, времени, возмущающего воздействия и т. п. Под алгоритмом, функционирования, или законом регулирования, будем подразумевать функциональную зависимость установившихся, заданных значений регулируемой величины от этих факторов.
Значение регулируемой величины и характер ее изменения, как мы уже убедились, зависят от ряда факторов: задающего воздействия, времени, возмущающего воздействия и т. п. Под алгоритмом, функционирования, или законом регулирования, будем подразумевать функциональную зависимость установившихся, заданных значений регулируемой величины от этих факторов.
Каждая автоматическая система определяется характером ее алгоритма функционирования (закона воспроизведения), характером ее алгоритма управления и наличием (отсутствием) способности к самоприспосабливанию. Эти признаки и положены в основу классификации автоматических систем.
По характеру алгоритма функционирования автоматические системы делятся на стабилизирующие, следящие и программные.
В стабилизирующих системах регулируемая величина y при любых возмущениях F(f), действующих на систему, поддерживается регулятором постоянной и равной заданному значению yо в пределах допустимых отклонений y = yо + Δy,
где Δy - отклонение регулируемой величины, зависящее от величины возмущения F(t), действующего на систему.
Задающие воздействия х(t) в таких системах являются постоянными, заранее заданными величинами: x(t) = const.
Автоматические системы стабилизации могут быть выполнены то принципу астатического и статического регулирования. Подробно об этом смотрите здесь: Астатическое и статическое регулирование.
К следящим системам автоматического регулирования относятся системы, в которых воспроизведение входной величины, изменяющейся по произвольному закону, осуществляется на выходе системы с допустимой ошибкой.
Закон воспроизведения для следящей системы может быть записан в следующем виде: у = х или y = kx,
где х - произвольная входная величина, зависящая от времени или других параметров и в общем случае неизвестная заранее, k - коэффициент масштаба.
В следящих системах применяется терминология, отличная от терминологии, используемой в системах регулирования: вместо "регулирование" говорят "слежение", "окончание процесса" - "отработка", "входная величина" - "ведущая величина", "выходная величина" - "ведомая величина".
На рис. 1, а показана примерная блок-схема следящей системы.
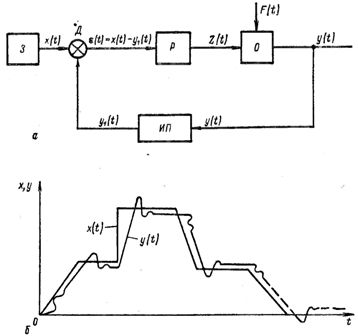
Рис. 1. Блок-схема (а) и диаграмма (б) изменения углового перемещения на входе и выходе следящей системы: 3 - ведущий элемент, Д - датчик рассогласования, Р - регулятор, О - объект, ИП - измерительно-преобразовательный элемент.
Основным элементом следящей системы является датчик рассогласования Д, который определяет рассогласование (ошибку) между ведомой и ведущей величинами. Ведомая величина у измеряется измерительно-преобразовательным элементом МП и приводится к уровню ведущей величины х.
Датчик рассогласования Д устанавливает величину рассогласования между ведущей величиной х, поступающей от ведущего элемента 3, и ведомой величиной у и выдает сигнал регулятору Р, который вырабатывает регулирующее воздействие Z(t) на объект. Регулятор стремится свести к нулю появившееся рассогласование. Под рассогласованием подразумевается отклонение ведомой величины от заданного значения ведущей.
На рис. 1, б приведена примерная диаграмма изменения ведущей х и ведомой y величин следящей системы.
Автоматические системы, которые заставляют регулируемую величину y изменяться по определенному, заранее заданному закону, называются системами программного регулирования.
Закон воспроизведения для программной системы может быть выражен уравнением
у = х(t),
где х (t) - заданная (известная заранее) функция времени, которую система должна воспроизводить.
В таких системах необходимо иметь специальное устройство - задатчик, который менял бы задающую величину х (t) по определенному требуемому закону.

По характеру алгоритма управления автоматические системы делятся на автоматические системы с разомкнутой цепью воздействий (разомкнутый цикл регулирования) и автоматические системы с замкнутой цепью воздействий (замкнутый цикл регулирования).
Самоприспосабливающиеся автоматические системы делятся на самоприспосабливающиеся, или самонастраивающиеся, и системы без самоприспосабливания. Необходимо отметить, что самоприспосабливающиеся системы представляют собой новый вид систем и не все понятия этого вида систем полностью сформировались, поэтому в разных учебниках они имеют различные названия,
Ко всем производственным установкам предъявляются требования, чтобы они работали в оптимальном режиме с точки зрения расхода энергии, производительности и качества выполнения производственной операции.

При автоматизации таких установок необходимо иметь специальные устройства, которые могли бы обеспечить автоматическую настройку производственной установки на работу в оптимальном режиме. Такие специальные устройства и называются системами автоматической настройки, или самонастраивающимися системами регулирования.
Эти системы автоматически приспосабливают производственную установку к меняющимся условиям работы, т. е. к изменяющимся характеристикам регулируемого объекта (изменениям возмущения), и заставляют ее работать в оптимальном режиме, поэтому системы автоматической настройки часто называют системами оптимального, или экстремального, регулирования.
Применение таких систем позволяет повысить производительность установки, улучшить качество выпускаемой продукции, снизить затраты труда на единицу продукции и т. д. В будущем многие автоматизированные установки будут иметь системы автоматической настройки.