

 Программируемые контроллеры предназначены для циклового программного управления станками и различным технологическим оборудованием, оснащенным датчиками и исполнительными устройствами, которые работают по двухпозиционному принципу: "включен-выключен". В статье процесс составления управляющей программы рассмотрен на примере контроллера модели МКП-1.
Программируемые контроллеры предназначены для циклового программного управления станками и различным технологическим оборудованием, оснащенным датчиками и исполнительными устройствами, которые работают по двухпозиционному принципу: "включен-выключен". В статье процесс составления управляющей программы рассмотрен на примере контроллера модели МКП-1.
В зависимости от исполнения этот контроллер позволяет управлять 16, 32 или 48 устройствами. Количество входных цепей для подключения датчиков соответствует числу выходов. Каждый вход и выход имеет свой адрес.
Контроллер обеспечивает управление исполнительными устройствами, прием информации от датчиков состояния оборудования, формирование выдержек времени, организацию условных и безусловных переходов по программе управления, а также реализует другие функции.
Проектирование управляющего устройства сводится к двум этапам: 1 – составление схемы подключения датчиков и исполнительных устройств к контроллеру, 2 – составление управляющей программы по схеме алгоритма.
Подключение датчиков
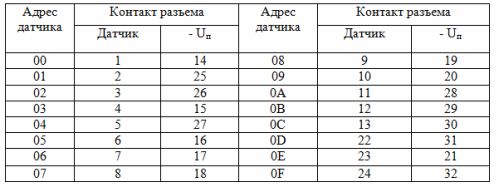
Двухпозиционные кнопки и датчики подключаются к входным разъемам контроллера в соответствии с Таблицей 1. Каждому входу соответствует свой адрес.
Для питания входных цепей необходим источник питания с выходным напряжением Un =20…30 В. Срабатыванию датчика соответствует замыка¬ние входной цепи (уровень двоичной 1), разомкнутое состояние цепи эквивалентно уровню двоичного 0.
Пример подключения контакта датчика к входу контроллера приведен на рис.1
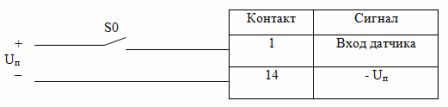
Рис.1. Схема подключения контакта датчика
Таблица 1. Цепи входных сигналов контроллера
Подключение исполнительных устройств
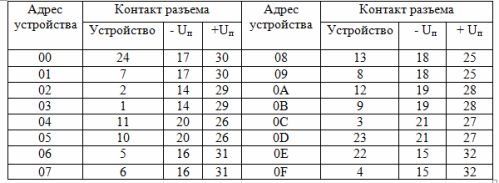
Исполнительные устройства (катушки реле, входные цепи бесконтактных аппаратов) подключаются к выходным разъемам контроллера в соответствии с таблицей 2.
Таблица 2. Цепи выходных сигналов контроллера
Пример подключения катушек реле к выходам контроллера приведен на рис.2.
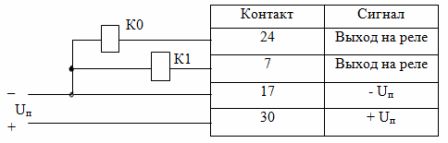
Рис.2. Схема подключения катушек реле
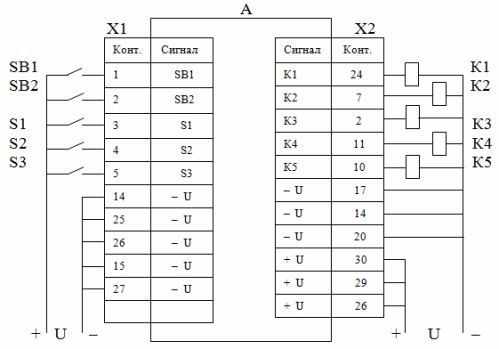
Пример полной схемы подключения внешних устройств к контроллеру
Система счисления контроллера
Контроллер оперирует с цифрами, выраженными в шестнадцатеричной системе счисления. Основанием системы является десятичное число 16, алфавит состоит из десяти цифр (0…9) и шести латинских букв (A, B, C, D, E, F). Буквы соответствуют десятичным числам 10, 11, 12, 13, 14, 15.
Подробнее о шестнадцатеричной системе счисления: Системы счисления чисел
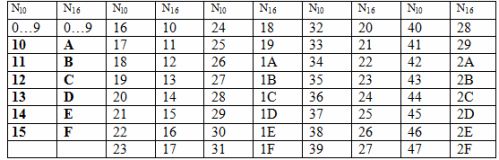
При программировании все числовые величины задаются шестнадцатеричными значениями. В таблице 3 приведен ряд чисел в шестнадцатеричной системе N16 и их десятичные эквиваленты Nl0.
Таблица 3. Числа в шестнадцатеричной системе счисления
Система команд контроллера
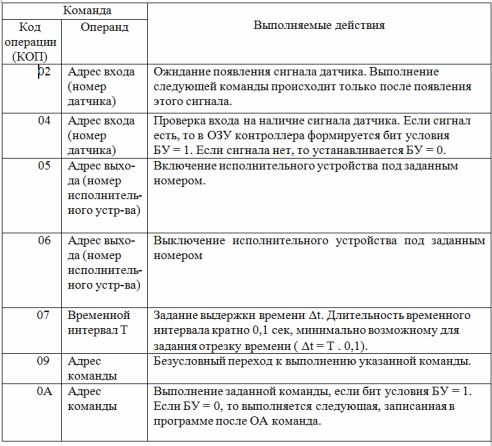
Программируемый контроллер оснащен системой команд, предназначенной для решения задач программного управления. В таблице 4 приведены небольшая часть команд контроллера.
Команда состоит из двух частей: кода выполняемой операции (КОП) и операнда, в котором указывается адрес объекта, над которым производится операция. При этом в качестве такого объекта выступают как датчики и исполнительные устройства, так и команды самой программы. При задании временных интервалов операндом является длительность этих интервалов.
Таблица 4. Система команд контроллера
Составление схемы алгоритма
Порядок работы любого устройства может быть описан с помощью графических символов, образующих схему алгоритма. При составлении схемы могут быть использованы символы четырех типов, называемые вершинами (рис. 3).

Рис. 3. Вершины схемы алгоритма
Вершина «Начало» соответствует исходному состоянию устройства управления до воздействия на него органами управления, например, кнопкой «Пуск».
Вершина «Конец» соответствует окончанию процесса управления, например, после нажатия кнопки «Стоп».
Операционная вершина соответствует выполнению определенной элементарной операции над приборами, входящими в состав устройства управления, например включение или выключение реле. На схеме внутри значка вершины записывается выполняемая операция.
Условная вершина определяет условие перехода от одной операционной вершины к другой. Условие задается датчиком, кнопкой управления или другим устройством. Состояние датчика или кнопки и соответственно выходы вершины обозначаются цифрами 1 или 0.
Например: путевой выключатель «включен» – 1; «выключен» – 0.
Составление схемы алгоритма сводится к соединению вершин в соответствии с требуемым порядком работы автоматизируемого устройства. Фрагмент схемы алгоритма показан на рис.4. На схеме символом Х1 обозначен переключатель, Δt – временной интервал.
Составление управляющей программы
Каждая команда в программе записывается под своим порядковым номером, который является ее адресом. Составление программы выполняется по схеме алгоритма и должна содержать набор команд, реализующих все операции, указанные в схеме.
Перед разработкой программы необходимо составить схему подключения датчиков и исполнительных устройств. В зависимости от места подключения этих устройств они получают свой номер, который в программе является их адресом.
Составление программы следует начинать с вершины схемы "Начало" и далее последовательно программировать операции вплоть до вершины "Конец".
Если выполнение какой-либо операции производится после срабатывания кнопки, путевого выключателя или другого датчика, то задается команда 02 , а в качестве операнда записывается номер данного датчика. При этом контроллер будет выполнять команду включения или выключения исполнительных аппаратов только после получения сигнала о срабатывании этого датчика.
Включение или выключение аппаратов выполняется командами соответственно 05 или 06. В операнде записывается номер коммутируемого аппарата
Задание временных интервалов осуществляется командой 07. В операнде записывается коэффициент, который при умножении на 0,1 сек. дает требуемое время задержки.
Например, при задании t = 2,6 сек. в операнде записывается число 1А (26 в десятичной системе счисления). Максимальное значение выдержки времени, задаваемое одной командой 07, равно 25,5 сек (команда 07 FF). Если необходимо получить временную задержку большую, чем 25,5 секунд, то в управляющей программе следует последовательно включить несколько команд 07, суммарно обеспечивающих требуемый временной интервал.
Для реализации в программе условных переходов (в схеме алгоритма условная вершина с операциями как по «1», так и по «0») следует сначала задать команду проверки этой вершины 04.
Если датчик, соответствующий этой вершине, находится в состоянии «1», то сформируется бит условия БУ = 1. Если датчик в состоянии «0», то сформируется БУ = 0.
Следующей задается команда ОА, которая, если в предыдущей команде установлен БУ = 1, переведет контроллер на выполнение команды, указанной в операнде этой команды.
При БУ = 0 контроллер будет выполнять команду, идущую следом за командой ОА.
При составлении программы рекомендуется сначала записать последовательность команд, которую будет выполнять контроллер при БУ = 0, не указывая операнда в команде ОА. После записи всех команд, выполняемых контроллером по условию «0», в программу заносится команда, выполняемая по условию «1». Адрес этой команды указывается в операнде команды ОА.
ПРИМЕЧАНИЕ: Для бита условия исходным состоянием является БУ = 1, которое устанавливается после включения питания контроллера и после исполнения команд условных переходов.
Пример записи программы для фрагмента схемы алгоритма по рис. 4 показан в таблице 5.
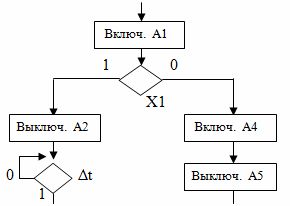
Рис. 4. Фрагмент схемы алгоритма
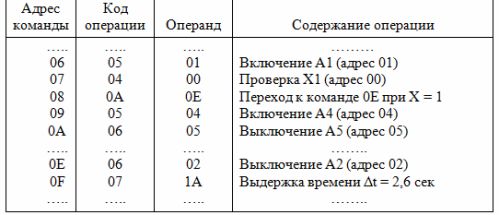
Таблица 5. Фрагмент управляющей программы