

 Основное назначение следящих приводов: слежение за вводимым в систему сигналом управления, изменяющимся по заранее неизвестному закону. Следящие приводы составляют большую группу приводов, используемых в промышленности. Наиболее распространенным случаем является отработка движения некоторого входного вала выходным валом привода. При этом повторение движения выходным валом должно осуществляться с требуемой ошибкой. В следящих приводах регулируемой величиной обычно является угол поворота Θ, а само регулирование — регулированием по положению.
Основное назначение следящих приводов: слежение за вводимым в систему сигналом управления, изменяющимся по заранее неизвестному закону. Следящие приводы составляют большую группу приводов, используемых в промышленности. Наиболее распространенным случаем является отработка движения некоторого входного вала выходным валом привода. При этом повторение движения выходным валом должно осуществляться с требуемой ошибкой. В следящих приводах регулируемой величиной обычно является угол поворота Θ, а само регулирование — регулированием по положению.
Функциональная схема следящего привода, приведенная на рис. 1, имеет замкнутую структуру с жесткой отрицательной обратной связью по углу поворота Θ2 выходного вала.
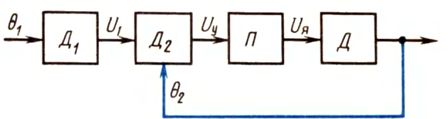
Рис. 1. Функциональная схема следящего привода
Принцип действия следящего привода следующий. Предположим, что между углом Θ1 входного вала и Θ2 выходного вала появилось некоторое рассогласование, т. е. Θ1 не равно Θ2. Датчики Д1 и Д2 формируют напряжения, пропорциональные углам поворота, и выдают на вход преобразователя П напряжение управления Uy = U1-U2, где U1 = k1Θ1, U2 = k2Θ2. Поэтому датчики Д1 и Д2 обычно называют измерителями рассогласования. Преобразователь П преобразует Uy в пропорциональный сигнал управления двигателем, которым может быть напряжение подаваемое на якорь.
Напряжение Uy формируется такого знака, чтобы двигатель Д, получив питание, стал поворачивать свой вал в направлении, при котором разность углов Θ2-Θ1 уменьшалась. Иными словами, следящий привод всегда стремится к непрерывному автоматическому устранению рассогласования между входным и выходным валами.
В качестве измерителя рассогласования в следящем приводе применяют потенциометрический измеритель, сельсин, работающий в трансформаторном режиме, вращающийся трансформатор и др., в качестве устройства преобразователь - двигатель системы Г—Д, ЭМУ-Д, МУ-Д, УВ-Д и др.
Структурная схема простейшей следящей системы, показанная на рис. 2, состоит из сельсина датчика СД, сельсина приемника СП, которые работают в трансформаторном режиме и выполняют функции датчиков Д1 и Д2, т. е. измерителя рассогласования входного угла Θ1 и выходного Θ2.
Сельсины - это электрические микромашины переменного тока, обладающие способностью самосинхронизации. Их применяют в дистанционных системах передачи угла в качестве датчиков и приемников. Передача угловой величины в такой системе происходит синхронно, синфазно и плавно. При этом между устройством, задающим угол (датчиком), и устройством, принимающим передаваемую величину (приемником), существуют только электрическое соединение в виде линии связи.
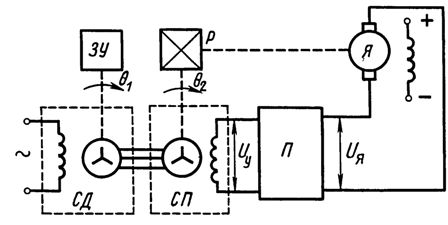
Рис. 2. Схема следящего привода с сельсинами

Рис. 3. Сельсины
В систему включается преобразователь, который выпрямляет переменное напряжение однофазной обмотки СП и усиливает его. Преобразователь (см. рис. 2) должен быть знакочувствительным, т. е. в зависимости от фазы сигнала обмотки СП выдавать на якорь двигателя постоянное напряжение положительного или отрицательного знака.
Исполнительный двигатель связан с ротором СП через понижающий редуктор Р. Входной задающий угол поворота Θ1 вводится в систему задающим устройством ЗУ, вал которого связан неподвижно с валом СД. Иногда эта связь осуществляется через редуктор.
Если ЗУ переместит вал СД от его исходного положения в положение угла Θ1, на выходе однофазной обмотки СП появится переменное напряжение, амплитуда которого пропорциональна разности входного и выходного углов привода Uy = U1 = k1(Θ1-Θ2).
Частота напряжения Uy определяется частотой питания однофазной обмотки СД (50, 400 Гц и т. д.). Преобразователь П выпрямляет и усиливает напряжение Uy.
Схемно он может быть представлен фазочувствительным выпрямителем и усилителем постоянного тока, выполненным на различной элементной базе. Например, в качестве выпрямителя может быть использован транзисторный усилитель, а в качестве усилителя — ЭМУ.
Электрический двигатель, получив питание в виде Uя в зависимости от полярности этого напряжения начинает поворачивать свой вал и вал СП через редуктор таким образом, что разность углов Θ1 и Θ2 уменьшается. Как только окажется, что Θ1-Θ2 = 0, однофазная обмотка СП перестанет выдавать напряжение Uy, т. е. Uy = 0. Тогда снимется напряжение, подаваемое на якорь двигателя, и он перестанет поворачивать свой вал. Таким образом, система отрабатывает сигнал управления, поступивший извне.
Часто в следящих системах кроме отрицательной связи по углу поворота (по положению) используется обратная связь по частоте вращения. В этом случае схема, приведенная на рис. 2, изменится.
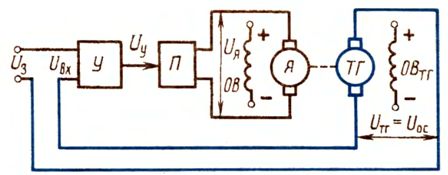
Рис. 4. Схема замкнутого привода с отрицательной обратной связью по частоте вращения
На валу двигателя будет находиться тахогенератор, а напряжение с его обмотки будет подаваться на преобразователь П последовательно с напряжением Uу, так как это показано на рис. 4. На практике используют и другие виды обратных связей.