

 Режимы работы центробежных насосов энергетически наиболее эффективно регулировать путем изменения частоты вращения их рабочих колес. Частота вращения рабочих колес может быть изменена, если в качестве приводного двигателя используются регулируемый электропривод.
Режимы работы центробежных насосов энергетически наиболее эффективно регулировать путем изменения частоты вращения их рабочих колес. Частота вращения рабочих колес может быть изменена, если в качестве приводного двигателя используются регулируемый электропривод.
Устройство и характеристики газовых турбин и двигателей внутреннего сгорания таковы, что они могут обеспечить изменение частоты вращения в необходимом диапазоне.
Процесс регулирования частоты вращения любого механизма удобно анализировать с помощью механических характеристик агрегата.
Рассмотрим механические характеристики насосного агрегата, состоящего из насоса и электродвигателя. На рис. 1 представлены механические характеристики центробежного насоса, оборудованного обратным затвором (кривая 1) и электродвигателя с короткозамкнутым ротором (кривая 2).
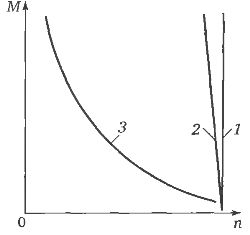
Рис. 1. Механические характеристики насосного агрегата
Разница значений вращающего момента электродвигателя и момента сопротивления насоса называется динамическим моментом. Если вращающий момент двигателя больше момента сопротивления насоса, динамический момент считается положительным, если меньше — отрицательным.
Под воздействием положительного динамического момента насосный агрегат начинает работать с ускорением, т.е. разгоняется. Если динамический момент отрицательный, насосный агрегат работает с замедлением, т.е. тормозится.
При равенстве этих моментов имеет место установившийся режим работы, т.е. насосный агрегат работает с постоянной частотой вращения. Эта частота вращения и соответствующий ей момент определяются пересечением механических характеристик электродвигателя и насоса (точка а на рис. 1).
Если в процессе регулирования тем или иным способом изменить механическую характеристику, например сделать ее более мягкой за счет введения дополнительного резистора в роторную цепь электродвигателя (кривая 3 на рис. 1), момент вращения электродвигателя станет меньше момента сопротивления.
Под воздействием отрицательного динамического момента насосный агрегат начинает работать с замедлением, т.е. тормозится до тех пор, пока вращающий момент и момент сопротивления опять не уравновесятся (точка б на рис. 1). Этой точке соответствует своя частота вращения и свое значение момента.
Таким образом, процесс регулирования частоты вращения насосного агрегата непрерывно сопровождается изменениями вращающего момента электродвигателя и момента сопротивления насоса.
Регулирование частоты вращения насоса может осуществляться или изменением частоты вращения электродвигателя, жестко соединенного с насосом, или изменением передаточного отношения трансмиссии, соединяющей насос с электродвигателем, который работает с постоянной скоростью.

Регулирование частоты вращения электродвигателей
В насосных установках используются преимущественно двигатели переменного тока. Частота вращения электродвигателя переменного тока зависит от частоты питающего тока f, числа пар полюсов р и скольжения s. Изменив один или несколько из этих параметров можно изменить частоту вращения электродвигателя и сочлененного с ним насоса.
Основным элементом частотного электропривода является частотный преобразователь. В преобразователе постоянная частота питающей сети f1 преобразуется в переменную f2. Пропорционально частоте f2 изменяется частота вращения электродвигателя, подключенного к выходу преобразователя.
С помощью частотного преобразователя практически неизменные сетевые параметры напряжение U1 и частота f1 преобразуются в изменяемые параметры U2 и f2, требуемые для системы управления. Для обеспечения устойчивой работы электродвигателя, ограничения его перегрузки по току и магнитному потоку, поддержания высоких энергетических показателей в частотном преобразователе должно поддерживаться определенное соотношение между его входными и выходными параметрами, зависящее от вида механической характеристики насоса. Эти соотношения получаются из уравнения закона частотного регулирования.
Для насосов должно соблюдаться соотношение:U1/f1 = U2/f2 = const
На рис. 2 представлены механические характеристики асинхронного электродвигателя при частотном регулировании. При уменьшении частоты f2 механическая характеристика не только меняет свое положение в координатах n - М, но несколько изменяет свою форму. В частности, снижается максимальный момент электродвигателя. Обусловлено это тем, что при соблюдении соотношения U1/f1 = U2/f2 = const и изменении частоты f1 не учитывается влияние активного сопротивления статора на величину вращающего момента двигателя.
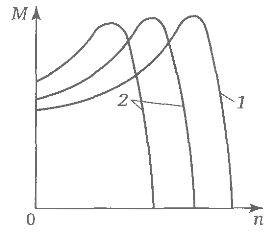
Рис. 2. Механические характеристики частотного электропривода при максимальных (1) и пониженных (2) частотах
При частотном регулировании с учетом этого влияния максимальный момент остается неизменным, форма механической характеристики сохраняется, меняется только ее положение.
Частотные преобразователи с широтно-импульсной модуляцией (ШИМ) имеют высокие энергетические характеристики за счет того, что на выходе преобразователя обеспечивается форма кривых тока и напряжения, приближающаяся к синусоидальной. В последнее время наибольшее распространение получили частотные преобразователи на IGBT-модулях (биполярных транзисторах с изолированным затвором).
IGBT-модуль является высокоэффективным ключевым элементом. Он обладает малым падением напряжения, высокой скоростью и малой мощностью переключения. Преобразователь частоты на IGBT-модулях с ШИМ и векторным алгоритмом управления асинхронным электродвигателем имеет преимущества по сравнению с другими типами преобразователей. Он характеризуется высоким значением коэффициента мощности во всем диапазоне изменения выходной частоты.
Принципиальная схема преобразователя представлена на рис. 3.
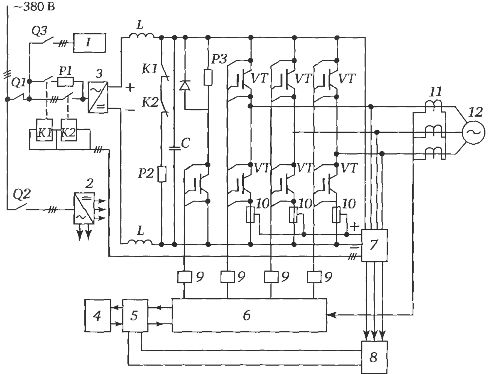
Рис. 3. Схема частотного преобразователя на IGBT-модулях: 1 — блок вентиляторов; 2 — источник питания; 3 — выпрямитель неуправляемый; 4 — панель управления; 5 — плата пульта управления; 6 — ШИМ; 7 — блок преобразования напряжения; 8 — плата системы регулирования; 9 — драйверы; 10 — предохранители блока инвертора; 11 — датчики тока; 12 — асинхронный короткозамкнутый двигатель; Q1, Q2, Q3 — выключатели силовой цепи, цепи управления и блока вентиляторов; K1, К2 — контакторы заряда конденсаторов и силовой цепи; С — блок конденсаторов; Rl, R2, R3 — резисторы ограничения тока заряда конденсаторов, разряда конденсаторов и узла слива; VT — силовые ключи инвертора (IGBT-модули)
На выходе частотного преобразователя формируется кривая напряжения (тока), несколько отличающаяся от синусоиды, содержащая высшие гармонические составляющие. Их наличие влечет за собой увеличение потерь в электродвигателе. По этой причине при работе электропривода на частотах вращения, близких к номинальной, происходит перегрузка электродвигателя.
При работе на пониженных частотах вращения ухудшаются условия охлаждения самовентилируемых электродвигателей, применяемых в приводе насосов. В обычном диапазоне регулирования насосных агрегатов (1:2 или 1:3) это ухудшение условий вентиляции компенсируется существенным снижением нагрузки за счет уменьшения подачи и напора насоса.
При работе на частотах, близких к номинальному значению (50 Гц), ухудшение условий охлаждения в сочетании с появлением гармоник высших порядков требует снижения допустимой механической мощности на 8 - 15%. Из-за этого максимальный момент электродвигателя снижается на 1 - 2%, его КПД — на 1 - 4%, cosφ — на 5 - 7%.
Во избежание перегрузки электродвигателя необходимо или ограничить верхнее значение его частоты вращения, или оснастить привод более мощным электродвигателем. Последняя мера обязательна тогда, когда предусматривается работа насосного агрегата с частотой f2 > 50 Гц. Ограничение верхнего значения частоты вращения двигателя осуществляется ограничением частоты f2 до 48 Гц. Увеличение номинальной мощности приводного электродвигателя осуществляется с округлением до ближайшего стандартного значения.

Групповое управление регулируемыми электроприводами агрегатов
Многие насосные установки состоят из нескольких агрегатов. Как правило, регулируемым электроприводом оборудуются не все агрегаты. Из двух-трех установленных агрегатов регулируемым электроприводом достаточно оснастить один. Если один преобразователь постоянно подключен к одному из агрегатов, имеет место неравномерное расходование их моторесурса, поскольку агрегат, оснащенный регулируемым приводом, используется в работе значительно большее время.
Для равномерного распределения нагрузки между всеми агрегатами, установленными на станции, разработаны станции группового управления, с помощью которых агрегаты могут поочередно подключаться к преобразователю. Станции управления изготавливаются обычно для низковольтных (380 В) агрегатов.
Обычно низковольтные станции управления предназначены для управления двумя-тремя агрегатами. В состав низковольтных станций управления входят автоматические выключатели, обеспечивающие защиту от межфазных коротких замыканий и замыканий на землю, тепловые реле для защиты агрегатов от перегрузки, а также аппаратура управления (ключи, кнопочные посты и пр.).
Схема коммутации станции управления содержит в своем составе необходимые блокировки, позволяющие произвести подключение преобразователя частоты к любому выбранному агрегату и осуществить замену работающих агрегатов без нарушения технологического режима работы насосной или воздуходувной установки.
Станции управления, как правило, наряду с силовыми элементами (автоматическими выключателями, контакторами и т.п.) содержат в своем составе управляющие и регулирующие устройства (микропроцессорные контроллеры и пр.).
По требованию заказчика станции комплектуются устройствами автоматического включения резервного питания (АВР), коммерческого учета потребляемой электроэнергии, управления запорной аппаратурой.
При необходимости в состав станции управления вводятся дополнительные аппараты, обеспечивающие использование наряду с частотным преобразователем устройства плавного пуска агрегатов.
Автоматизированные станции управления обеспечивают:
-
поддержание заданного значения технологического параметра (давления, уровня, температуры и др.);
-
контроль режимов работы электродвигателей регулируемых и нерегулируемых агрегатов (контроль потребляемого тока, мощности) и их защиту;
-
автоматическое включение в работу резервного агрегата при аварии основного;
-
переключение агрегатов непосредственно на сеть при выходе из строя частотного преобразователя;
-
автоматическое включение резервного (АВР) электрического ввода;
-
автоматическое повторное включение (АПВ) станции после пропажи и глубоких посадок напряжения в питающей электрической сети;
-
автоматическое изменение режима работы станции с остановкой и запуском агрегатов в работу в заданное время;
-
автоматическое включение в работу дополнительно нерегулируемого агрегата, если регулируемый агрегат, выйдя на номинальную частоту вращения, не обеспечивал требуемой подачи воды;
-
автоматическое чередование работающих агрегатов через заданные промежутки времени для обеспечения равномерного расходования моторесурса;
-
оперативное управление режимом работы насосной (воздуходувной) установки с панели управления или с диспетчерского пульта.
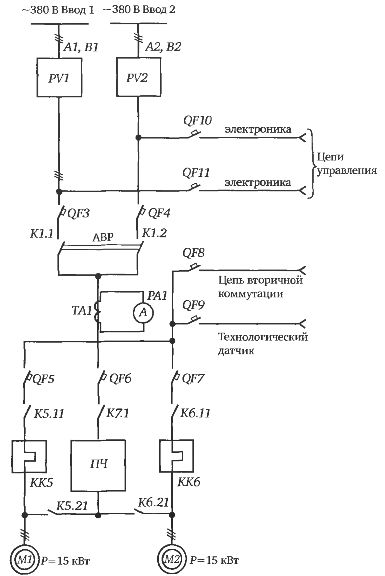
Рис. 4. Станция группового управления частотно-регулируемыми электроприводами насосов
Эффективность применения частотно-регулируемого электропривода в насосных установках
Применение частотно-регулиремого привода позволяет существенно экономить электроэнергию, т. к. дает возможность использовать крупные насосные агрегаты в режиме малых подач. Благодаря этому можно, увеличив единичную мощность агрегатов, уменьшить их общее число, и следовательно, уменьшить габаритные размеры зданий, упростить гидравлическую схему станции, уменьшить число трубопроводной арматуры.
Таким образом, применение регулируемого электропривода в насосных установках позволяет наряду с экономией электроэнергии и воды уменьшить число насосных агрегатов, упростить гидравлическую схему станции, уменьшить строительные объемы здания насосной станции. В связи с этим возникают вторичные экономические эффекты: уменьшаются расходы на отопление, освещение и ремонт здания, приведенные затраты в зависимости от назначения станций и других конкретных условий могут быть сокращены на 20 - 50%.
В технической документации на преобразователи частоты указывается, что применение регулируемого электропривода в насосных установках позволяет экономить до 50% энергии, расходуемой на перекачку чистых и сточных вод, а сроки окупаемости составляют три - девять месяцев.
Вместе с тем расчеты и анализ эффективности регулируемого электропривода в действующих насосных установках показывает, что в небольших насосных установках с агрегатами мощностью до 75 кВт, особенно тогда, когда они работают с большой статической составляющей напора, оказывается нецелесообразным применение регулируемых электроприводов. В этих случаях можно использовать более простые системы регулирования с применением дросселирования, изменения числа работающих насосных агрегатов.
Применение регулируемого электропривода в системах автоматизации насосных установок, с одной стороны, уменьшает потребление энергии, с другой — требует дополнительных капитальных затрат, поэтому целесообразность применения регулируемого электропривода в насосных установок определяется сравнением приведенных затрат двух вариантов: базового и нового. За новый вариант принимается насосная установка, оснащенная регулируемым электроприводом, а за базовый — установка, агрегаты которой работают с постоянной частотой вращения.