

Тележка мостового крана является самостоятельным элементом подъемнотранспортного устройства и предназначена для перемещения грузов в пределах пролета мостового крана с технологически заданной скоростью движения и требуемой точностью позиционирования груза. Привод тележки является одним из основных узлов оборудования мостового крана.
Тележка перемещается по колее мостового крана. Сам же мост перемещается в направлении, перпендикулярном направлению движения тележки. На тележке установлен подъемный механизм, который оборудован крюком (или электромагнитом), с помощью которого можно перемещать груз. Движение тележки является составной частью технологического цикла мостового крана (рис. 1).
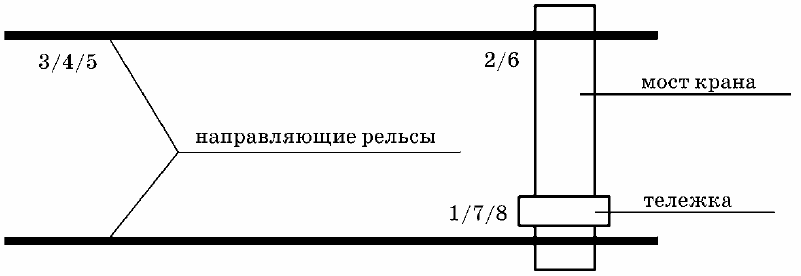
Рис. 1. Схема выполнения операций мостовым краном в рабочем цикле
Этот цикл состоит из следующих операций (на рисунке 1 номера операций показаны цифрами):
1 — подъем груза;
2 — перемещение тележки в заданное положение;
3 — перемещение крана в заданное положение;
4 — опускание груза массой;
5 — подъем крюка с массой груза;
6 — перемещение крана в исходное положение;
7 — перемещение тележки в исходное положение;
8 — опускание крюка.
Как видно из технологического цикла мостового крана, двигатель привода тележки включается во второй и седьмой операциях. При подходе тележки к заданному положению в пролете мостового крана осуществляется электрическое торможение электродвигателя привода тележки для обеспечения необходимой точности остановки.
После этого двигатель отключается и накладывается механический тормоз. Далее включается электропривод передвижения моста и груз перемещается вдоль цеха согласно технологическому заданию. Достигнув указанного места, кран останавливается, груз опускается, и далее выполняются необходимые технологические операции.

Кинематическая схема механизма передвижения те лежки мостового крана представлена на рисунке 2. Механизм передвижения тележки выполнен по схеме с редуктором посредине между приводными колесами.
Движение от электродвигателя Д через тормозной шкив Т, редуктор Р, соединительные муфты М и валы В передается на ходовые колеса. Для удержания тележки в неподвижном состоянии используется тормозной шкив.
Тележка имеет четыре ходовых и два приводных колеса. Ходовые колеса крановых тележек обычно изготовляют двухреберными.
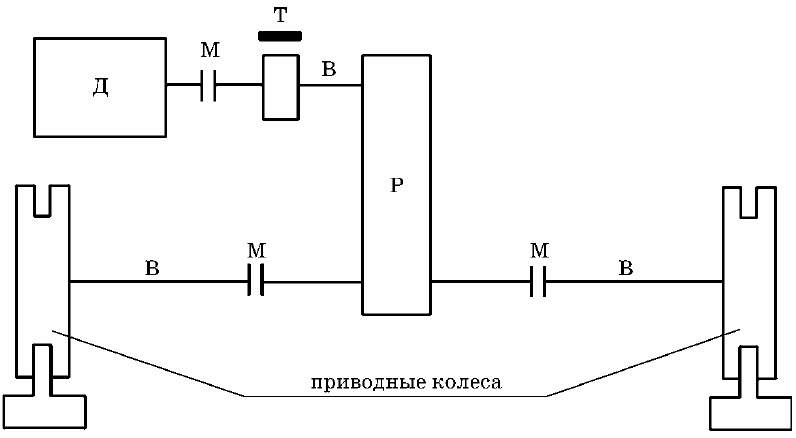
Рис. 2. Кинематическая схема механизма передвижения тележки
Время перемещения тележки в заданное положение будет определяться с учетом времени разгона и торможения тележки с требуемым ускорением. Исходя из условий технологического процесса, тахограмма при перемещении тележки должна иметь вид, показанный на рисунке 3.
Необходимо обеспечить плавный пуск механизма тележки до заданной скорости с требуемым ускорением. Для обеспечения требуемой точности позиционирования необходимо плавное замедление электропривода с переходом на пониженную скорость, затем происходит остановка тележки.
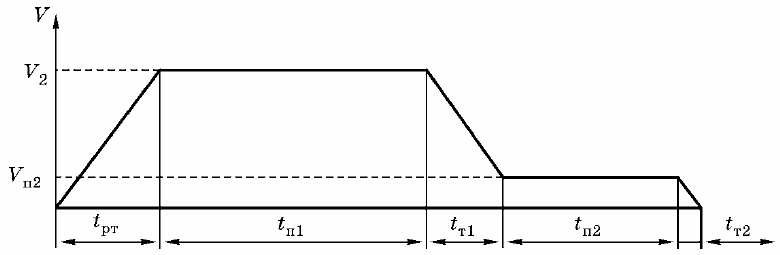
Рис. 3. Тахограмма механизма передвижения тележки
Движение тележки с ударами по металлоконструкции на стыках рельсов, интенсивные разгоны и торможения, собственные колебания металлоконструкций при нагружении машин вызывают весьма интенсивные механические воздействия на электрооборудование, располагаемое на тележке мостового крана. Исходя из этого, электропривод перемещения тележки должен удовлетворять следующим требованиям:
1) электропривод должен обеспечить возможность пуска механизма в ход, реверсирование направления перемещения и останов механизма с требуемым ускорением (м/с2) и надлежащей точностью позиционирования (мм);
2) электропривод должен обеспечить плавное регулирование скорости вниз от основной;
3) развиваемый момент двигателя должен обеспечить работу механизма с заданной интенсивностью;
4) при заданном числе включений двигателя в час не должно быть перегрева его обмоток, из-за которого возможен длительный останов механизма;
5) двигатель должен быть выбран в соответствии с условиями эксплуатации, т. е. должен иметь соответствующую конструкцию, а его обмотки — термостойкую и противосыростную изоляцию;
6) приводной двигатель должен обладать наименьшими маховыми массами, оказывающими существенное влияние на протекание переходных процессов при частых пусках привода;
7) приводной двигатель должен соответствовать мощности механизма передвижения и обладать необходимой перегрузочной способностью;
8) электропривод должен обеспечить формирование переходных процессов, имеющих минимальную длительность;
9) конструктивно электропривод должен быть выполнен с учетом безопасности и удобства обслуживания.

Статический момент для механизмов передвижения, работающих на горизонтальном пути в производственном помещении, создается силами трения скольжения в подшипниках и трения качения колес тележки, катящихся по рельсам мостового крана. Статический момент механизма при прямом ходе тележки определяется грузоподъемностью крана. Статический момент механизма при обратном ходе тележки рассчитывается для неполного груза.
Для электропривода тележки мостовых кранов применяются асинхронные двигатели с короткозамкнутым ротором (в том числе в составе частотно-регулируемого привода), асинхронные двигатели с фазным ротором и двигатели постоянного тока независимого возбуждения.