

 Поляризованные электромагнитные реле отличаются от нейтральных электромагнитных реле способностью реагировать на полярность управляющего сигнала. Магнитная цепь поляризованного реле дифференциального типа (рис. 1, а) имеет постоянный магнит 1. Поляризующий магнитный поток Ф0 проходит по якорю 2, разветвляется на два потока Ф1 и Ф2 в воздушных зазорах δ1 и δ 2 и замыкается по сердечнику 4. Для увеличения быстродействия реле сердечник собран из листовой электротехнической стали.
Поляризованные электромагнитные реле отличаются от нейтральных электромагнитных реле способностью реагировать на полярность управляющего сигнала. Магнитная цепь поляризованного реле дифференциального типа (рис. 1, а) имеет постоянный магнит 1. Поляризующий магнитный поток Ф0 проходит по якорю 2, разветвляется на два потока Ф1 и Ф2 в воздушных зазорах δ1 и δ 2 и замыкается по сердечнику 4. Для увеличения быстродействия реле сердечник собран из листовой электротехнической стали.
Якорь также собран из двух пластинок электротехнической стали и подвешен на стальной пружинке. Поток управления Фу создается двумя намагничивающими обмотками 5, расположенными на сердечнике.
Контактная система 3 реле имеет один переключающий контакт. Положение неподвижных контактов можно регулировать, изменяя настройку реле.
Если в обмотках ток отсутствует, то под действием силы притяжения, созданной потоком Ф0, якорь может находиться в одном из крайних положений, например в левом, как показано на рис. 1, а.
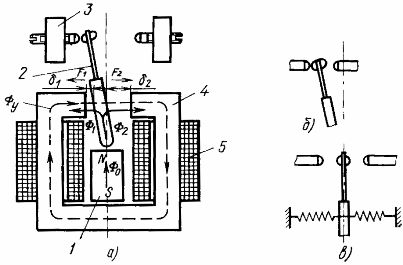
Рис. 1. Поляризованное электромагнитное реле
Потоки Ф1 и Ф2 обратно пропорциональны величине воздушных зазоров δ 1 и δ 2 между якорем и соответствующим полюсом сердечника. В среднем нейтральном положении потоки Ф1 и Ф2 одинаковы, и силы притяжения якоря к обоим полюсам сердечника равны: F1=F2. Однако это промежуточное положение сердечника неустойчиво. При смещении якоря влево поток Ф1 усиливается, а поток Ф2 ослабевает и происходит соответствующее перераспределение силы притяжения между полюсами: F1>F2.
Действие тока управления зависит от его полярности. Для переключения реле необходим ток, который создает в зазоре магнитный поток Фу, совпадающий по направлению с потоком Ф2. Ток обратной полярности усилит поток Ф1 и приведет только к увеличению контактного нажатия.
Для срабатывания реле поток Фу должен превысить максимальное значение потока Ф1 при минимальном значении зазора δ.
По мере движения якоря вправо зазор δ 1 увеличивается, поток Ф1 и его противодействующее влияние уменьшаются. В среднем положении наступает динамическое равновесие, после чего возросший поток Ф2 создает дополнительную силу, ускоряющую якорь. Это повышает быстродействие поляризованных реле. Для возврата контактной системы в начальное положение необходимо опять изменить полярность тока в управляющей обмотке.
Поляризованное реле, имеющее такую настройку, называется двухпозиционным. Оно переключается под действием разнополярных импульсов, причем после прекращения действия управляющего импульса контактная система реле не возвращается в исходное состояние.
В двухпозиционных поляризованных реле с преобладанием один из неподвижных контактов выдвинут за нейтральную линию (рис. 1, б). Такое реле реагирует на управляющие импульсы только определенной полярности и возвращается в исходное положение, когда управляющий импульс снят.
Существуют трехпозиционные поляризованные реле (рис. 1, в), в которых якорь удерживается пружинками в нейтральном положении. В зависимости от полярности управляющего сигнала замыкается левый или правый контакт реле. При прекращении входного сигнала якорь возвращается в исходное нейтральное положение. Такое реле эквивалентно двум поляризованным реле с преобладанием.
Поляризованные реле обладают большой чувствительностью. Мощность срабатывания реле составляет 0,01—5,0 мВт.
Разрывная мощность контактов реле достаточно велика, что позволяет коммутировать ток 0,2—1,0 А при напряжении 24 В. Коэффициент усиления поляризованных реле составляет (1 - 5)х103.
Высокое быстродействие допускает работу поляризованных реле с частотой включения 100—200 Гц.