

 Электрический аппарат, реализующий релейный закон управления, называется реле. В реле при плавном изменении управляющего (входного) параметра до определенного заданного значения управляемый (выходной) параметр изменяется скачкообразно. При этом хотя бы один из этих параметров должен быть электрическим.
Электрический аппарат, реализующий релейный закон управления, называется реле. В реле при плавном изменении управляющего (входного) параметра до определенного заданного значения управляемый (выходной) параметр изменяется скачкообразно. При этом хотя бы один из этих параметров должен быть электрическим.
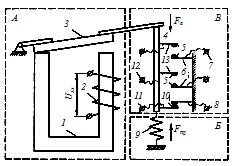
Действие функциональных органов электромагнитного реле можно проследить по схеме рис. 1. Воспринимающий орган А преобразует входную величину (напряжение) Uвх, поступающую на обмотку 2 магнитопровода 1, в промежуточную величину, т.е. в механическую силу якоря 3. Механическая сила якоря Fя действует на контактную систему исполнительного органа В. Промежуточная величина – сила якоря Fя, – пропорциональная входной величине Uвх, сравнивается с заданным значением силы Fпр развиваемой пружиной 9 промежуточного органа Б. При Uвх< Uср, Fя
В процессе функционирования электромагнитные реле во временном масштабе различают четыре фазы: период (время) срабатывания tср, рабочий период tраб, период (время) отключения tоткл, период (время) покоя tп (рис.2).
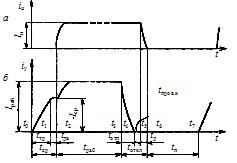
Рис. 2. Зависимость выходной (а) и выходной (б) величин от времени
Период срабатывания электромагнитного реле
 Период срабатывания включает промежуток времени от момента начала воздействия входного сигнала на воспринимающий орган до момента появления сигнала в управляемой цепи. Этому периоду на рис.2, б соответствует отрезок оси абсцисс tср = t2 –t0. В момент t0 ток в обмотке реле возрастает до значения, при котором электромагнитной силе Fэ, действующей на якорь, начинает противодействовать сила пружины Fм (механическая сила) промежуточного органа. Входная величина при этом называется величиной трогания при срабатывании.
Период срабатывания включает промежуток времени от момента начала воздействия входного сигнала на воспринимающий орган до момента появления сигнала в управляемой цепи. Этому периоду на рис.2, б соответствует отрезок оси абсцисс tср = t2 –t0. В момент t0 ток в обмотке реле возрастает до значения, при котором электромагнитной силе Fэ, действующей на якорь, начинает противодействовать сила пружины Fм (механическая сила) промежуточного органа. Входная величина при этом называется величиной трогания при срабатывании.
Периоду трогания соответствует отрезок tтр = t1–t0. В момент времени t1 якорь электромагнита реле начинает движение. В течение tдв = t2–t1 якорь перемещается, преодолевая противодействие промежуточного органа Б (см. рис. 1) и приводя в действие исполнительный орган В.
В конце хода якоря замыкаются контакты исполнительного органа, ток нагрузки iн (рис.2, а) начинает возрастать от нуля до установившегося значения. Входная величина, при которой начинается управление выходной цепью, называется величиной срабатывания (Iср). Мощность Рср, соответствующая Iср, называется мощностью срабатывания.
Время срабатывания t ср = tтр + tдв.
Время срабатывания электромагнитных реле колеблется от 1-2 до 20 мс. Электромагнитные реле времени обеспечивают выдержку до 10 с.
Для оценки времени срабатывания реле допустимо использовать выражение
t ср = t1kз-bm –a,
где t1 – время срабатывания при заданном коэффициенте запаса kз и коэффициенте m = 1; a, b – коэффициенты, которые определяются в зависимости от типа реле и значений kз и m.
Для быстродействующих реле при kз = 1,5¸2 значение коэффициента а приближается к единице. Для обыкновенных реле при k з = 1,5¸3 значение а = 0,25¸0,95, значение коэффициента b находится обычно в пределах 1,4-1,6.
Рабочий период электромагнитного реле
 Рабочий период включает промежуток времени tраб = t3 – t2, т.е. время от момента управления выходной цепью t2 до момента прекращения воздействия на воспринимающий орган входного сигнала t3. Ток начинает расти до установившегося значения Iраб (рис.2, б) – это рабочее значение входной величины, которое обеспечивает надежное срабатывание реле.
Рабочий период включает промежуток времени tраб = t3 – t2, т.е. время от момента управления выходной цепью t2 до момента прекращения воздействия на воспринимающий орган входного сигнала t3. Ток начинает расти до установившегося значения Iраб (рис.2, б) – это рабочее значение входной величины, которое обеспечивает надежное срабатывание реле.
Отношение Iраб / Icр = kз называется коэффициентом запаса по срабатыванию.
Для характеристики перегрузочной способности чувствительного элемента реле применяется значение входной величины, называемое предельным значением рабочей величины Iраб.max.
Предельное значение рабочей величины – это такое ее значение, которое чувствительный орган выдерживает в течение короткого нормируемого промежутка времени. Однако значение данной величины недопустимо при работе реле в нормальном режиме по условию электрической или механической прочности или нагрева.
Для характеристики нагрузочной способности исполнительного органа реле используется понятие мощности управления Ру. Мощностью управления называется мощность в управляемой цепи, которую исполнительный орган может длительно пропускать.
Период отключения электромагнитного реле
 Период отключения содержит промежуток времени tоткл = t6 – t3, т.е. время от момента прекращения воздействия на воспринимающий орган t3 до момента уменьшения тока iн в управляемой цепи до нуля (рис.16, а).
Период отключения содержит промежуток времени tоткл = t6 – t3, т.е. время от момента прекращения воздействия на воспринимающий орган t3 до момента уменьшения тока iн в управляемой цепи до нуля (рис.16, а).
В период отключения входит период отпускания tотп = t4 – t3, в который реле отключается. Ток iy в обмотке реле спадает до нуля (рис.2, б). В этот период противодействующее усилие пружины (механическое усилие) превышает электромагнитное усилие, т.е. Fм > Fэ, и происходит отпускание якоря.
После выбора провала контактов (промежуток tк = t5 – t4) контакты реле размыкаются и между ними загорается дуга, которая гаснет через время tд = t6 – t5. За период tд ток в управляемой цепи уменьшается от Iн до нуля (рис.2, а).
Время отключения реле t откл = tотп + tк + tд.
Период отключения характеризуется коэффициентом возврата, представляющим отношение тока отпускания Iотп к току срабатывания Iср: kв = Iотп / Icр.
Обычно для реле защиты энергосистем и реле управления, контролирующих входной параметр в узких пределах, kв должен быть ближе к единице.
Период покоя электромагнитного реле
Период покоя – это промежуток времени tп = t7 – t6.
Для периода покоя характерен параметр, называемый величиной несрабатывания, которая представляет наибольшее значение входной величины, обеспечивающее отсутствие как срабатывания реле, так и удержания в рабочем состоянии. Время несрабатывания меньше времени трогания при срабатывании и времени отпускания.
Отношение мощности управления к мощности срабатывания называется коэффициентом усиления, kу = Py / Pcр.
Число включений в единицу времени определяется величиной, обратно пропорциональной времени цикла:
f = 1/tц = 1/(tсраб +tраб + tоткл +tп)
Лакота О. Б.