

Бесконтактные магнитные подшипники - это устройства, которые используют магнитные силы для поддержки и левитации вращающихся компонентов, таких как роторы электродвигателей, без физического контакта между ними. Они обеспечивают эффективное снижение трения и износа, что приводит к увеличению срока службы и производительности оборудования.
Говоря о магнитных подшипниках или бесконтактных подвесах, нельзя не отметить их замечательные качества: не нужна смазка, отсутствуют трущиеся части, следовательно, нет потерь на трение, крайне низкий уровень вибрации, высокая относительная скорость, малое энергопотребление, система автоматического контроля и мониторинга состояния подшипников, возможность герметизации.
Все эти достоинства делают магнитные подшипники лучшими решениями для множества применений: для газовых турбин, для криогенной техники, в высокооборотных электрогенераторах, для вакуумных устройств, для различных станков и прочего оборудования, в том числе высокоточного и высокоскоростного (порядка 100000 оборотов в минуту), где важно отсутствие механических потерь, помех и погрешностей.
Принципиально магнитные подшипники подразделяются на два типа: пассивные и активные магнитные подшипники. Пассивные магнитные подшипники изготавливаются на базе постоянных магнитов, но такой подход далеко не идеален, поэтому используется он крайне редко. Более гибкие и широкие технические возможности открываются с подшипниками активными, в которых магнитное поле создается переменными токами в обмотках сердечников.
Как работает бесконтактный магнитный подшипник

Работа активного магнитного подвеса или подшипника базируется на принципе электромагнитной левитации — левитации с использованием электрического и магнитного полей. Здесь вращение вала в подшипнике происходит без физического контакта поверхностей друг с другом. Именно по этой причине полностью исключается смазка, а механический износ тем не менее отсутствует. Так повышаются надежность и КПД машин.
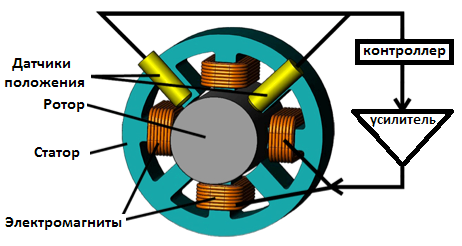
Специалисты также отмечают важность наличия контроля положения вала ротора. Система датчиков непрерывно следит за положением вала и подает сигналы системе автоматического управления для точного позиционирования путем корректировки позиционирующего магнитного поля статора, - сила притяжения с нужной стороны вала делается сильнее или слабее путем регулировки тока в статорных обмотках активных подшипников.
Два конических активных подшипника либо два радиальных и один осевой активные подшипники — позволяют бесконтактно подвесить ротор буквально в воздухе. Система управления подвесом работает непрерывно, она может быть цифровой или аналоговой. Так обеспечивается высокая прочность удержания, высокая грузоподъемность, и регулируемые жесткость и амортизация. Данная технология позволяет подшипникам работать в условиях низких и высоких температур, в вакууме, на больших скоростях и в условиях повышенных требований к стерильности.
Устройство активного бесконтактного магнитного подшипника
Из вышеизложенного ясно, что основными частями системы активного магнитного подвеса являются: магнитный подшипник и автоматическая система электронного управления. Электромагниты все время действуют на ротор с разных сторон, и действие их подчинено электронной системе контроля.

Ротор радиального магнитного подшипника оснащен ферромагнитными пластинами, на которые и действует удерживающее магнитное поле от катушек статора, в результате чего ротор оказывается подвешен в центре статора, не соприкасаясь с ним. Индуктивные датчики все время следят за положением ротора. Любое отклонение от правильного положения приводит к появлению сигнала, который подается на контроллер, чтобы тот в свою очередь вернул ротор в нужное положение. Радиальный зазор может составлять от 0,5 до 1 мм.
Аналогичным образом функционирует упорный магнитный подшипник. Электромагниты в форме кольца закреплены на валу упорного диска. Электромагниты располагаются на статоре. На концах вала располагаются осевые датчики.
Для надежного удержания ротора машины во время ее остановки или в момент отказа системы удержания, используются страховочные шариковые подшипники, которые закреплены так, что зазор между ними и валом выставлен равным половине того, что имеет место в магнитном подшипнике.
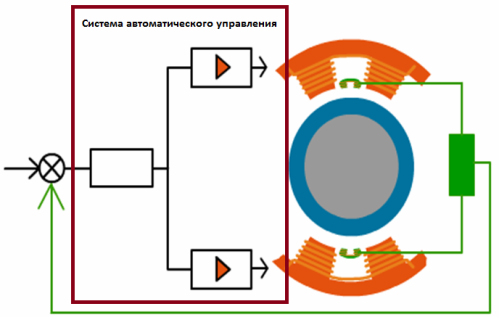
Система автоматического регулирования располагается в шкафу, и отвечает за правильную модуляцию тока, проходящего по электромагнитам, в соответствии с сигналами от датчиков положения ротора. Мощность усилителей связана с максимальной силой электромагнитов, величиной воздушного зазора и временем реакции системы на изменение положения ротора.
Возможности бесконтактных магнитных подшипников
Максимально возможная скорость вращения ротора в радиальном магнитном подшипнике ограничена лишь способностью ферромагнитных пластин ротора сопротивляться центробежной силе. Обычно предел окружной скорости составляет 200 м/с, в то время как для осевых магнитных подшипников предел ограничен стойкостью литой стали упора — 350 м/с с обычными материалами.
От применяемых ферромагнетиков зависит и максимальная нагрузка, которую способен выдержать подшипник соответствующего диаметра и длины статора подшипника. Для стандартных материалов максимальное давление — 0,9 Н/см2, что меньше чем у обычных контактных подшипников, однако проигрыш в нагрузке может быть компенсирован высокой окружной скоростью при увеличенном диаметре вала.
Энергопотребление активного магнитного подшипника не очень велико. Наибольшие потери в подшипнике приходятся на вихревые токи, но это в десятки раз меньше чем та энергия, которая растрачивается при использовании в машинах обычных подшипников. Муфты, термоизоляционные барьеры и другие устройства исключаются, подшипники эффективно работают в условиях вакуума, гелия, кислорода, морской воды и т. д. Диапазон температур составляет от -253°С до +450°С.
Относительные недостатки магнитных подшипников
Между тем, есть у магнитных подшипников и недостатки.
В первую очередь — необходимость применять вспомогательные страховочные подшипники качения, которые выдерживают максимум два отказа, после чего их нужно менять на новые.
Во-вторых, сложность системы автоматического управления, которая при выходе из строя потребует сложного ремонта.
В-третьих, температура обмотки статора подшипника при высоких токах повышается — обмотки греются, и им нужно персональное охлаждение, лучше если жидкостное.
Наконец, материалоемкость бесконтактного подшипника оказывается высокой, потому что площадь несущей поверхности для поддержания достаточной магнитной силы должна быть обширной — сердечник статора подшипника получается большим и тяжелым. Плюс явление магнитного насыщения.

Но, несмотря на кажущиеся недостатки, магнитные подшипники уже достаточно широко применяются, в том числе в оптических системах высокой точности и в лазерных установках. Так или иначе, начиная с середины прошлого века магнитные подшипники все время совершенствуются.
Андрей Повный