

Функции управления оборудованием определяются технологией и организацией процесса. Поэтому в целом они достаточно специфичны и индивидуальны для каждого агрегата или участка. Однако ставя и решая задачу разработки эффективного, мобильного и гибкого программного обеспечения систем автоматизации, сложные функции управления обычно представляют в виде набора простых элементарных действий типа “включить", “отключить", “реализовать выдержку времени” и др.
С этих позиций большинство функций управления может быть условно сведено к двум, достаточно общим для любых задач - логической и регулирующей. Первая из них известна как типовой алгоритм “время-действие", а вторая - “время-параметр". Наиболее общее представление таких типовых функций управления технологическим оборудованием приведено на рис. 1, a и б.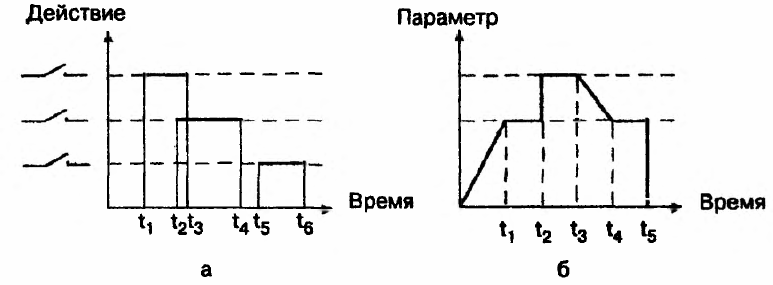
Рис. 1. Типовые функции управления технологическим оборудованием
На основе анализа количественных характеристик реализуемых функций управления в каждом конкретном примере технологического оборудования могут быть сформулированы технические требования к программируемому логическому контроллеру (ПЛК) как средству управления по точности, быстродействию, числу параллельно решаемых задач, объему памяти, составу периферийного оборудования, средствам диалога и т.д.
Стандарт МЭК 61131-3 описывает 5 языков программирования, явившихся результатом изучения наиболее удачных фирменных разработок мировых лидеров рынка ПЛК:
-
язык релейно-контактных схем (РКС) или релейных диаграмм LD (Ladder Diagram),
-
язык функциональных блоков и диаграмм (ФБД), FBD (Function Block Diagram),
-
язык IL (Instruction list) – типичный ассемблер с аккумулятором и переходами по меткам,
-
язык ST (Structured Text) является текстовым языком высокого уровня,
-
SFC (Sequential Function Chart) диаграммы. Своим происхождением SFC обязан сетям Петри.
Языки ПЛК весьма оригинальны и существенно отличаются от известных языков программирования для компьютеров.
Стандарт не обязывает разработчиков ПЛК реализовывать все языки программирования. Обычно небольшие фирмы-изготовители ПЛК реализуют несколько или один единственный язык. Во многом приоритет использования того или иного языка программирования зависит от исторически сложившихся традиций в отрасли или сферы применения.
Стандартизация языков программирования и модели ПЛК привела к появлению специализированных фирм, занятых проектированием систем программирования для ПЛК, которые обеспечивают переход от языка программирования к машинному языку на различных уровнях:
-
при вводе программы;
-
при визуализации;
-
при изменении или перемещении отдельной команды или зоны программы;
-
при выявлении синтаксических ошибок и сигнализации оператору.
Для выполнения этих задач система программирования может успешно работать в локальном режиме, т. е. независимо от контроллера. Это дает возможность программисту писать программу, находясь в любом удобном месте, а не в производственном цехе, т. е. в обстановке более благоприятной для творческого процесса. Возможность моделирования значительно облегчает процесс отладки программы и улучшает организацию труда.

Основные этапы подготовки и составления программ для программируемых контроллеров заключаются в следующем:
1. Определите, что должна делать управляемая система (объект управления), цели управления и другие дополнительные функции, выполняемые системой управления, последовательность выполняемых операций исполнительных механизмов с привязкой ко времени и к состоянию датчиков и устройств управления.
2. Составьте алгоритм работы программы в графическом виде.
3. Определите, какие модули требуются для подключения датчиков, устройств управления, исполнительных механизмов, средств сигнализации и другой аппаратуры, необходимой в управлении объектом.
При выборе модулей проведите анализ параметров сигналов входа/выхода (уровни напряжений и тока) и функциональных возможностей модулей. Обратите внимание на возможность применения интеллектуальных модулей, которые могут выполнять предварительную обработку входных сигналов и некоторые функции локального управления, что позволит значительно уменьшить сложность программирования.
4. Составьте схему или таблицу подключения к модулям контроллера всех входных и выходных устройств объекта управления и аппаратуры, используемой в процессе управления.
5. Составьте программу на одном из языков программирования ПЛК, которая реализует заданную последовательность операций, их взаимосвязь и отрабатывает возможные аварийные ситуации.
6. Проверьте программу на синтаксические ошибки и откорректируйте их, а затем на ошибки выполнения и тоже внесите соответствующие исправления.
7. Запишите программу и все требуемые рабочие параметры в контроллер.
8. После того как система управления будет полностью собрана, проверьте программу в реальном процессе управления и, если необходимо, проведите более точную настройку.
9. Запишите две копии окончательной программы и храните их в разных местах.
«
Подписывайтесь на наши каналы в Telegram:
Школа для электрика и Электрика, электромонтажные работы