

История развития систем автоматического управления представляет собой увлекательный путь технологического прогресса, в котором ПИД-регуляторы играют ключевую роль.
Эти устройства, название которых образовано от трех фундаментальных составляющих - пропорциональной, интегральной и дифференциальной, прошли значительную эволюцию от простейших механических конструкций до сложных цифровых систем с элементами искусственного интеллекта.
В процессе своего развития ПИД-регуляторы не только сохранили базовые принципы работы, но и значительно расширили свои функциональные возможности, адаптируясь к требованиям современной промышленности и высокотехнологичных производств.

Что такое ПИД-регулятор
ПИД-регулятор — это автоматическое устройство, предназначенное для поддержания заданного значения какого-либо параметра, например температуры, давления или скорости, несмотря на внешние и внутренние возмущения. Его работа основана на принципе обратной связи: регулятор сравнивает текущее значение параметра с требуемым и формирует управляющее воздействие, чтобы минимизировать разницу между ними.
В основе ПИД-регулятора лежит математический алгоритм, который вычисляет управляющий сигнал как сумму трёх компонентов: пропорциональной, интегральной и дифференциальной.
Пропорциональная часть реагирует на текущую ошибку, интегральная — на накопленную ошибку за время, а дифференциальная — на скорость изменения ошибки. Благодаря этому ПИД-регулятор способен не только быстро возвращать параметр в нужный диапазон после отклонения, но и обеспечивать его точное удержание, а также предотвращать резкие колебания системы.
ПИД-регуляторы широко применяются в промышленности, автоматизации, робототехнике и бытовой технике. Их универсальность объясняется способностью адаптироваться к самым разным задачам управления и простотой настройки. В большинстве случаев именно ПИД-регуляторы обеспечивают оптимальное сочетание точности, скорости реакции и устойчивости системы.
Первые шаги автоматического регулирования
Истоки автоматического регулирования уходят корнями в эпоху промышленной революции, когда перед инженерами впервые встала задача создания устройств, способных без постоянного вмешательства человека поддерживать стабильность работы различных механизмов.
Наиболее ярким примером ранних систем автоматического регулирования стал центробежный регулятор Уатта, разработанный в конце XVIII века для контроля скорости паровых машин. Этот механизм представлял собой гениальное для своего времени решение, в котором вращающиеся грузы под действием центробежной силы воздействовали на систему рычагов, регулируя подачу пара в двигатель.
Принцип работы таких механических регуляторов уже содержал зачатки тех идей, которые позже легли в основу современного ПИД-регулирования. В частности, можно было наблюдать элементы пропорционального управления, где величина регулирующего воздействия прямо зависела от степени отклонения контролируемого параметра от заданного значения.
Однако эти ранние системы обладали существенными ограничениями - они были подвержены колебаниям, имели значительное время реакции и требовали точной механической настройки для каждого конкретного случая применения.
Несмотря на эти недостатки, механические регуляторы заложили фундаментальные принципы автоматического управления, которые продолжают развиваться и совершенствоваться до настоящего времени.
Переход к аналоговым системам управления
С развитием электротехники и появлением новых технологий в начале XX века произошла существенная трансформация систем автоматического регулирования.
На смену механическим устройствам пришли аналоговые электронные системы, использующие операционные усилители, релейные схемы и другие электронные компоненты для реализации принципов ПИД-регулирования. Этот переход открыл новые возможности в области автоматизации, позволив создавать более точные и надежные системы управления промышленными процессами.
Аналоговые ПИД-регуляторы представляли собой значительный шаг вперед по сравнению с механическими предшественниками.
Такие регуляторы реализуют алгоритм пропорционально-интегрально-дифференциального управления с помощью аналоговой электроники, обходясь без цифровой обработки сигнала.
В них три составляющих — пропорциональная, интегральная и дифференциальная — формируются непрерывно посредством операционных усилителей, конденсаторов и резисторов, которые выполняют необходимые математические операции — умножение, интегрирование и дифференцирование — над входным сигналом ошибки.
Аналоговые ПИД-регуляторы обеспечивали более высокую точность регулирования, позволяли плавно изменять коэффициенты усиления по каждой из составляющих (пропорциональной, интегральной и дифференциальной) с помощью переменных резисторов, а также обладали значительно большим быстродействием.
Эти системы нашли широкое применение в различных отраслях промышленности, включая химическое производство, энергетику и машиностроение, где требовалось точное поддержание технологических параметров.
Однако аналоговые системы имели и существенные ограничения. Они были подвержены влиянию температурных колебаний, что приводило к дрейфу параметров, требовали периодической калибровки и не обладали возможностью адаптации к изменяющимся условиям работы без физического вмешательства оператора.
Кроме того, сложность точной настройки таких регуляторов и невозможность их перепрограммирования без изменения аппаратной части существенно ограничивали область их применения в условиях динамично меняющихся технологических процессов.
Микропроцессорные системы управления
Настоящей революцией в развитии ПИД-регуляторов стало появление микропроцессорной техники в 1970-х годах. Переход от аналоговых к цифровым системам управления открыл новые горизонты в области автоматизации, предоставив инженерам беспрецедентные возможности по реализации сложных алгоритмов управления.
Цифровые ПИД-регуляторы реализуют алгоритм пропорционально-интегрально-дифференциального управления с помощью микропроцессорных или микроконтроллерных систем, где управляющий сигнал формируется программно на основе математических вычислений.
Такие регуляторы, работающие на основе дискретных выборок сигнала, не только сохранили все преимущества своих аналоговых предшественников, но и приобрели целый ряд новых функциональных возможностей.
Современные цифровые реализации ПИД-алгоритма позволяют не только точно вычислять управляющие воздействия, но и включают дополнительные функции, значительно расширяющие область их применения.
Среди этих функций можно отметить автоматическую настройку коэффициентов в реальном времени, адаптацию к изменяющимся условиям работы, запись и анализ переходных процессов, а также возможность реализации сложных модификаций классического алгоритма.
«
Подписывайтесь на наши каналы в Telegram:
Школа для электрика и Электрика, электромонтажные работы
Важным преимуществом цифровых систем стала их устойчивость к внешним помехам и шумам, что особенно важно в условиях промышленного производства с его сложной электромагнитной обстановкой.
На каждом цикле вычисления цифровой ПИД-регулятор измеряет ошибку — разницу между заданным значением и текущим состоянием процесса, затем рассчитывает управляющее воздействие, учитывая текущую ошибку, накопленную ошибку во времени и скорость изменения ошибки. Это позволяет эффективно компенсировать отклонения и поддерживать регулируемый параметр на заданном уровне с высокой точностью.
В промышленных системах управления цифровые ПИД-регуляторы чаще всего реализуются в виде программных модулей, работающих на программируемых логических контроллерах (ПЛК) или специализированных микроконтроллерах.
ПИД-регулятор в виде программы — это программная реализация алгоритма пропорционально-интегрально-дифференциального управления, которая вычисляет управляющий сигнал на основе текущей ошибки, накопленной ошибки и скорости её изменения.
Программа регулярно считывает текущее значение параметра, сравнивает его с заданным, вычисляет ошибку и формирует управляющее воздействие, учитывая все три составляющие ПИД-алгоритма.
Такая реализация обеспечивает простоту интеграции регуляторов в сложные автоматизированные системы, возможность дистанционного мониторинга и управления, а также гибкость при изменении алгоритмов работы без необходимости модификации аппаратной части.
Кроме того, цифровые системы позволяют легко реализовывать каскадные схемы регулирования, управление с прогнозированием и другие сложные алгоритмы, недоступные для аналоговых устройств.
ПИД-контроллеры
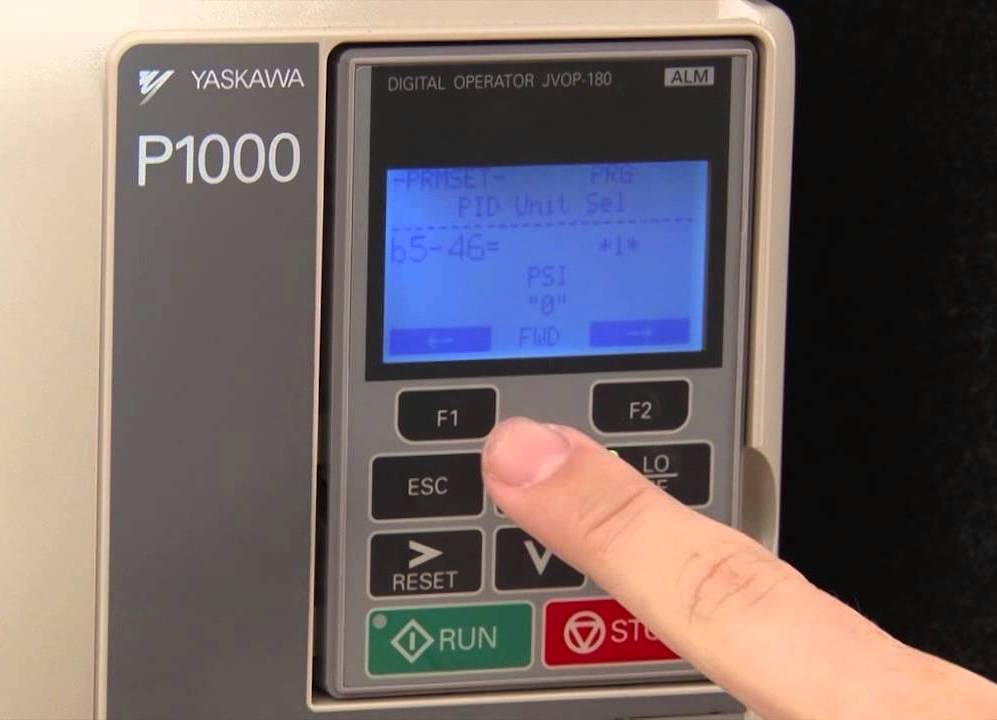
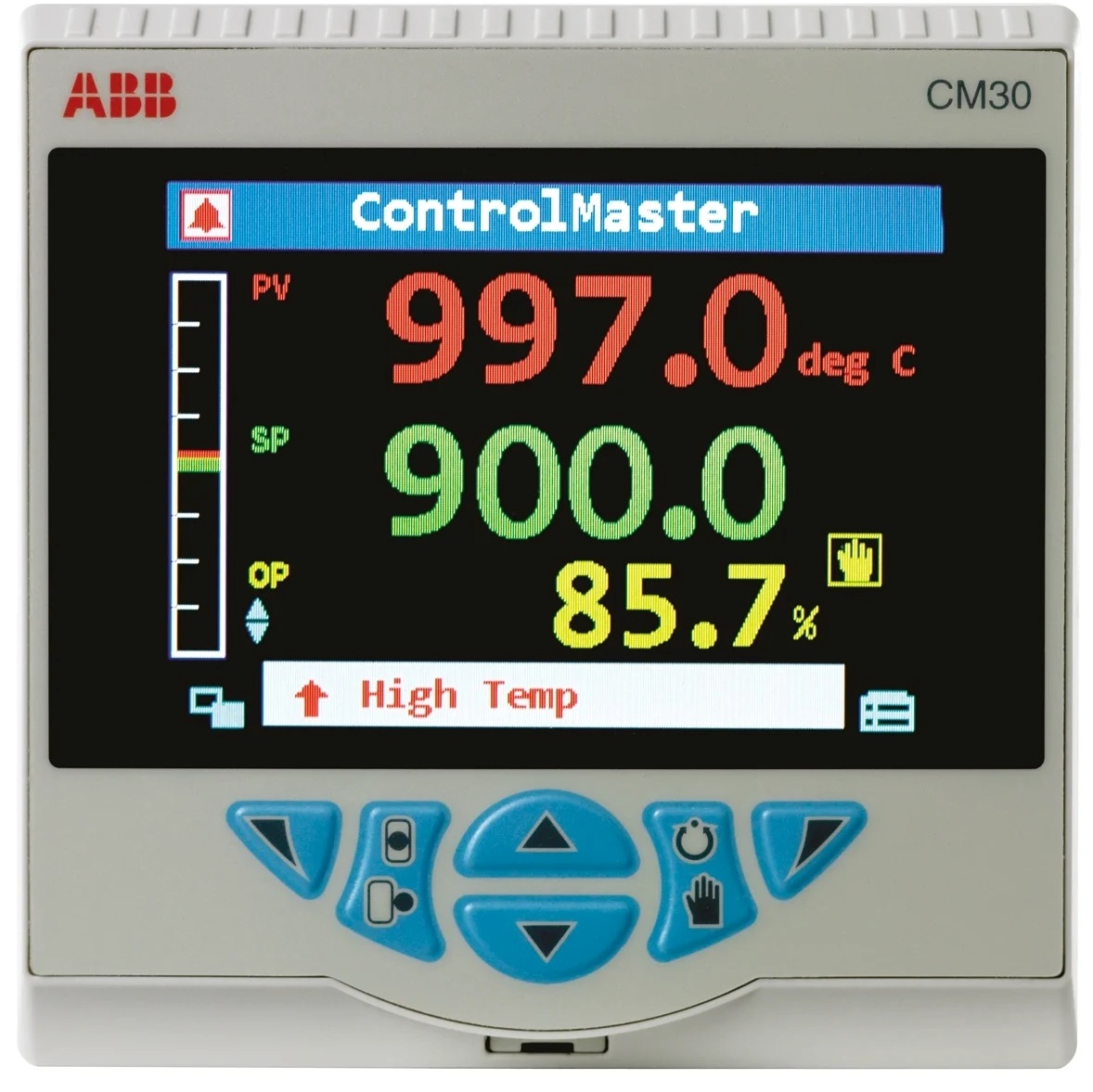
ПИД-контроллер в виде отдельного устройства представляет собой аппаратный прибор, который реализует алгоритм пропорционально-интегрально-дифференциального управления в автономном корпусе с входами для подключения датчиков и выходами для управления исполнительными механизмами. Такие устройства широко применяются в промышленности для точного поддержания параметров процесса, например, температуры, давления или скорости.
Внешне ПИД-контроллеры обычно имеют интерфейс для настройки коэффициентов ПИД, дисплей для отображения текущих значений и параметров, а также различные типы выходов — аналоговые, релейные или твердотельные реле. Они могут обладать функциями автоматической настройки (автонастройки) параметров, сигнализацией аварийных состояний и возможностью дистанционного управления через интерфейсы, такие как RS-485 с протоколом Modbus.
Отдельные ПИД-контроллеры обеспечивают высокую точность и стабильность регулирования благодаря непрерывной работе алгоритма в реальном времени и минимальным задержкам, что особенно важно в технологических процессах с жесткими требованиями. Их универсальность и надежность делают их востребованными в системах автоматизации, где требуется независимый и специализированный регулятор.
Интеллектуальные адаптивные системы
Современный этап развития ПИД-регуляторов характеризуется активным внедрением элементов искусственного интеллекта и машинного обучения в традиционные алгоритмы управления.
Классический ПИД-алгоритм все чаще дополняется нейросетевыми технологиями, методами нечеткой логики и другими передовыми подходами, позволяющими создавать системы, способные адаптироваться к сложным нелинейным процессам, плохо поддающимся традиционному математическому описанию.
Особое внимание в последние годы уделяется разработке распределенных систем управления, где множество ПИД-регуляторов работают согласованно через промышленные сети передачи данных. Такой подход особенно важен для сложных технологических процессов, где требуется координация работы множества взаимосвязанных контуров регулирования.
Современные промышленные сети, такие как Profibus, EtherCAT или Modbus, обеспечивают необходимую скорость передачи данных и синхронизацию работы распределенных систем управления.
Еще одним перспективным направлением является разработка самонастраивающихся и самодиагностирующихся систем управления. Эти интеллектуальные системы способны не только автоматически подстраивать свои параметры под изменяющиеся условия работы, но и прогнозировать возможные неисправности, что значительно повышает надежность технологических процессов и снижает вероятность аварийных ситуаций.
Внедрение технологий цифровых двойников и предиктивной аналитики открывает новые возможности для оптимизации работы ПИД-регуляторов в составе сложных производственных комплексов.

Заключение
От простейших механических регуляторов до современных интеллектуальных систем - ПИД-алгоритм прошел впечатляющий путь развития, сохранив при этом свою актуальность и востребованность.
Универсальность, понятность и доказанная эффективность этого подхода обеспечили ему доминирующее положение в области автоматического управления на протяжении более чем столетия.
Сегодня ПИД-регуляторы продолжают оставаться основным инструментом инженеров по автоматизации, находя применение в самых различных областях - от бытовой техники до космических аппаратов и сложных промышленных комплексов.
Современные тенденции развития систем автоматического управления свидетельствуют о том, что классический ПИД-алгоритм не только не утрачивает своей значимости, но и продолжает развиваться, адаптируясь к новым технологическим вызовам.
Сочетание проверенных временем принципов с передовыми цифровыми технологиями и методами искусственного интеллекта открывает новые перспективы для дальнейшего совершенствования систем автоматического регулирования.
Можно с уверенностью утверждать, что ПИД-регуляторы и их модификации останутся важнейшим инструментом автоматизации и в обозримом будущем, продолжая свою эволюцию в направлении увеличения интеллектуальности, адаптивности и интеграции в сложные киберфизические системы.
Смотрите также: Применение ПИД-регулятора в системах автоматики на примере ТРМ148 ОВЕН
Андрей Повный