

Сегодняшние промышленные роботы в большинстве своем привязаны к конкретному месту, что существенно ограничивает их функциональность и адаптивность.
Типичный промышленный робот представляет собой стационарный манипулятор, жестко закрепленный на полу или потолке производственного помещения. Его рабочая зона строго ограничена длиной манипулятора и конструктивными особенностями. Для перемещения такого робота требуется полная остановка производственного процесса, демонтаж, транспортировка и повторная установка с последующей калибровкой — процедура, занимающая дни или даже недели.
Даже современные автоматически управляемые транспортные средства (AGV), используемые на складах и в логистических центрах, имеют серьезные ограничения.
Они, как правило, следуют по заранее определенным маршрутам, обозначенным магнитными лентами, QR-кодами или другими метками. Их навигационные возможности ограничены, а способность адаптироваться к изменениям в окружающей среде минимальна.
Современные промышленные роботы напоминают деревья — мощные, производительные, но намертво укорененные в одном месте. Это фундаментально ограничивает их возможности и требует построения всей производственной экосистемы вокруг них, а не наоборот.
Такая привязка к конкретному месту создает множество проблем для современных производств:
1. Низкая гибкость производства — перенастройка линии под новый продукт требует значительных временных и финансовых затрат;
2. Неэффективное использование пространства — вокруг каждого робота должна быть выделена защитная зона, недоступная для людей;
3. Ограниченная масштабируемость — добавление новых роботов часто требует полной реорганизации производственного пространства;
4. Уязвимость к сбоям — выход из строя одного робота может остановить весь производственный процесс;
5. Высокие первоначальные инвестиции — стационарные роботизированные системы требуют значительных капитальных вложений.

Технологический прорыв: полностью автономные мобильные роботы
В настоящее время на заводах появляются полностью автономные мобильные роботы, способные перемещаться по всей территории предприятия без предварительного программирования маршрутов или специальной инфраструктуры. Эта технологическая революция стала возможной благодаря конвергенции нескольких передовых технологий:
1) Продвинутые системы восприятия и навигации
Мобильные роботы нового поколения оснащены комплексными системами восприятия, включающими лидары высокого разрешения для трехмерного картирования пространства с точностью до миллиметров. Также в их состав входят стереоскопические и глубинные камеры, обеспечивающие распознавание объектов и оценку расстояний.
Для обнаружения препятствий в сложных условиях освещения применяются ультразвуковые и инфракрасные датчики. Безопасное взаимодействие с объектами и людьми обеспечивают тактильные сенсоры, а точное отслеживание положения и ориентации в пространстве — инерциальные измерительные устройства.
Современные алгоритмы SLAM (одновременной локализации и картирования) позволяют роботам создавать детальные трехмерные карты окружающего пространства и точно определять свое положение в них без использования GPS или внешних маяков. Это фундаментально меняет возможности мобильной робототехники.
2) Искусственный интеллект для принятия решений
Автономность мобильных роботов обеспечивается продвинутыми алгоритмами искусственного интеллекта, способными планировать оптимальные маршруты в динамически меняющейся среде. Эти алгоритмы учитывают не только физические препятствия, но и движение людей, а также другие подвижные объекты.
Они могут прогнозировать изменения в окружающей обстановке — например, предугадывать направление движения человека, чтобы заранее скорректировать траекторию. Кроме того, такие системы способны принимать решения в условиях неопределенности, даже если данные неполны или противоречивы. Важной особенностью является способность обучаться на собственном опыте, постоянно совершенствуя навигационные навыки.
Ключевое отличие новых систем — умение действовать в непредвиденных ситуациях. Если современные роботы обычно останавливаются перед неожиданным препятствием, то роботы следующего поколения будут искать обходные пути, действуя так же гибко, как человек.
3) Модульная конструкция и универсальные манипуляторы
Мобильные роботы нового поколения кардинально отличаются от традиционных промышленных моделей своей модульной архитектурой. Вместо узкоспециализированных систем мы получаем универсальные платформы, которые можно оперативно адаптировать под разные задачи благодаря сменным компонентам.
Конструкция таких роботов предусматривает возможность установки различных манипуляторов с адаптивными захватами, способными работать с объектами любых форм и размеров.
Кроме того, платформа поддерживает подключение специализированных модулей - сварочного оборудования, дозирующих систем, прецизионных измерительных приборов и других инструментов.
Гибкость системы обеспечивается и за счет расширяемых вычислительных модулей, которые позволяют запускать специализированные алгоритмы обработки данных. Не менее важны сменные энергетические блоки, дающие возможность оптимизировать баланс между производительностью и продолжительностью автономной работы.
Этот подход знаменует переход от парадигмы "один робот - одна функция" к принципиально новой концепции. Теперь вместо десятка специализированных машин можно использовать одну универсальную платформу, которая за считанные минуты трансформируется под конкретную задачу.
Это похоже на то, как современный смартфон может становиться профессиональной камерой, медицинским диагностическим устройством или даже 3D-принтером в зависимости от установленных приложений и аксессуаров.
4) Беспроводная связь и облачные вычисления
Высокоскоростные системы связи станут ключевым элементом мобильной робототехники будущего. Использование передовых технологий 5G и перспективных 6G сетей обеспечит мгновенную передачу данных с задержкой менее 1 миллисекунды, что критически важно для работы автономных систем.
Эти сети обладают исключительной пропускной способностью, позволяя передавать видеопотоки сверхвысокого разрешения и осуществлять сложные облачные вычисления в реальном времени.
Особое значение имеет надежность соединения, которое сохраняет стабильность даже в сложных промышленных условиях с обилием металлических конструкций и сильных электромагнитных помех.
Многоуровневая система шифрования гарантирует полную безопасность передаваемой информации, защищая данные от несанкционированного доступа.
Такие коммуникационные возможности открывают принципиально новые перспективы: роботы получат возможность мгновенно обмениваться информацией как между собой, так и с облачными сервисами. Это дает им доступ к вычислительным мощностям, которые на порядки превосходят их собственные бортовые ресурсы, позволяя решать задачи любой сложности с большой эффективностью.
5) Роевой интеллект
Более того, эти роботы будут объединяться в "рои", где каждая единица — часть единого распределенного интеллекта. Концепция роевого интеллекта, вдохновленная поведением социальных насекомых, представляет собой фундаментальный сдвиг парадигмы в промышленной робототехнике — от централизованного управления к децентрализованной самоорганизации.

Принципы роевого интеллекта в робототехнике
Роевая робототехника: принципы и практическое применение
В основе роевых систем лежат биологически вдохновленные принципы, обеспечивающие их гибкость и надежность. В отличие от традиционных централизованных систем, здесь нет единого управляющего узла — вместо этого каждый робот взаимодействует только с ближайшими соседями, следуя простым алгоритмам.
Из таких локальных взаимодействий возникает сложное коллективное поведение, способное к самоорганизации и быстрой адаптации к изменениям.
Ключевое преимущество подхода — устойчивость: выход из строя отдельных единиц не нарушает работу всей системы, так как задачи мгновенно перераспределяются между остальными участниками роя.

Практические применения
1. Сборка крупногабаритных конструкций
Рои мобильных роботов способны радикально изменить процессы сборки в авиа- и судостроении. Например, на экспериментальной площадке Boeing десятки компактных роботов одновременно выполняют различные операции на поверхности авиационных крыльев: одни сверлят отверстия, другие устанавливают крепеж, третьи контролируют качество. Такой подход не только ускоряет производство, но и повышает точность, устраняя необходимость в громоздких стационарных манипуляторах.
2. Гибкое мелкосерийное производство
Для малых предприятий роевые системы открывают новые возможности быстрой переналадки производства. Один и тот же роботизированный коллектив утром может собирать медицинские приборы, днем — электронные компоненты, а вечером — бытовую технику. Смена специализации занимает минуты благодаря модульным инструментам и адаптивным алгоритмам, делая автоматизацию доступной даже для небольших фабрик.
3. Динамическая логистика
Современные склады постепенно трансформируются в «живые» системы, где сотни мобильных роботов непрерывно оптимизируют размещение товаров. В отличие от статичных конвейеров, такие системы автоматически перемещают наиболее востребованные товары ближе к зонам отгрузки, а редко заказываемые — в удаленные участки. Компании вроде Amazon уже внедряют элементы этой технологии, но будущие поколения роботов смогут манипулировать отдельными предметами, а не целыми стеллажами.
4. Инспекция промышленных объектов
Обследование крупных сооружений — от нефтяных платформ до мостов — становится в разы эффективнее с роями специализированных роботов. Например, при проверке морской платформы десятки устройств распределяют задачи: одни сканируют подводные конструкции, другие анализируют коррозию металла, третьи контролируют целостность сварных швов. Это позволяет за часы получить данные, на сбор которых у людей ушли бы недели.

Технологические основы роевого интеллекта
1) Алгоритмы коллективного принятия решений
В сердце роевого интеллекта лежат биологически вдохновленные алгоритмы, обеспечивающие согласованную работу множества автономных агентов. Эти алгоритмы демонстрируют удивительную эффективность, несмотря на свою концептуальную простоту.
Природные аналогии легли в основу трех ключевых подходов.
- Алгоритмы муравьиной колонии используют принцип стигмергии, где роботы оставляют в среде цифровые метки-феромоны, формируя коллективную "память" системы.
- Алгоритмы пчелиного роя имитируют стратегию поиска нектара, где разведчики обнаруживают ресурсы и мобилизуют остальных членов сообщества.
- Методы оптимизации роем частиц воспроизводят координацию в птичьих стаях, где каждый агент корректирует траекторию, учитывая опыт соседей.
Эти алгоритмы поражают своей способностью решать комплексные задачи через простые локальные взаимодействия. Их красота - в эмерджентности, когда из элементарных правил рождается сложное интеллектуальное поведение.
2) Распределенные вычисления и коммуникационные протоколы
Эффективная коммуникация составляет основу жизнеспособности роевых систем. Специализированные протоколы связи разрабатываются с учетом четырех критических требований: устойчивости к обрывам связи, масштабируемости, энергоэффективности и кибербезопасности.
Устойчивость к обрывам связи достигается за счет децентрализованных алгоритмов маршрутизации, которые автоматически перенаправляют данные по альтернативным путям при потере соединения с отдельными узлами. Это делает систему работоспособной даже в условиях частичного отказа оборудования или помех в радиоканале.
Масштабируемость обеспечивается иерархической организацией сети, где локальные группы роботов образуют кластеры, взаимодействующие через выделенные шлюзы. Такой подход позволяет увеличивать количество агентов в системе без потери производительности.
Энергоэффективность реализуется через адаптивные схемы передачи данных, которые динамически регулируют мощность сигнала и частоту обмена сообщениями в зависимости от текущих задач и расстояния между агентами. Специальные "спящие" режимы минимизируют энергопотребление в периоды низкой активности.
Кибербезопасность обеспечивается многоуровневой системой защиты, включающей:
-
Сквозное шифрование всех передаваемых данных;
-
Механизмы аутентификации участников роя;
-
Защиту от DDoS-атак через распределенную фильтрацию трафика;
-
Регулярное обновление криптографических ключей.
Дополнительно современные протоколы включают механизмы самодиагностики и автоматического восстановления, что делает роевые системы особенно надежными в критически важных применениях - от промышленного производства до спасательных операций.
3) Механизмы самоорганизации и адаптации
Способность к самоорганизации - ключевое конкурентное преимущество роевых систем. Этот феномен возникает благодаря четырем взаимодополняющим механизмам: усилению успешных стратегий через положительную обратную связь, подавлению неэффективных действий через отрицательную обратную связь, исследованию новых возможностей через контролируемую случайность и интенсивному обмену информацией между участниками системы.
Самоорганизующиеся системы демонстрируют беспрецедентную устойчивость к неопределенности. В отличие от жестко запрограммированных решений, они естественным образом перестраиваются при изменении условий, находя оптимальные конфигурации без внешнего вмешательства.
Эти принципы открывают новые горизонты для создания адаптивных, отказоустойчивых и масштабируемых роботизированных систем, способных решать задачи, недоступные традиционным подходам.

Практические примеры и пилотные проекты
Хотя полномасштабные промышленные применения роевой робототехники еще впереди, уже сегодня существует ряд пилотных проектов, демонстрирующих потенциал этой технологии:
1) Проект SWILT (Swarm Intelligence Layer for Transport)
Консорциум европейских компаний и исследовательских институтов разрабатывает систему управления транспортными потоками на производстве с использованием принципов роевого интеллекта. В рамках пилотного проекта на автомобильном заводе Volkswagen в Вольфсбурге 50 автономных транспортных роботов координируют свои действия для оптимизации доставки компонентов на сборочную линию.
2) Проект TERMES (Термитные роботы для строительства)
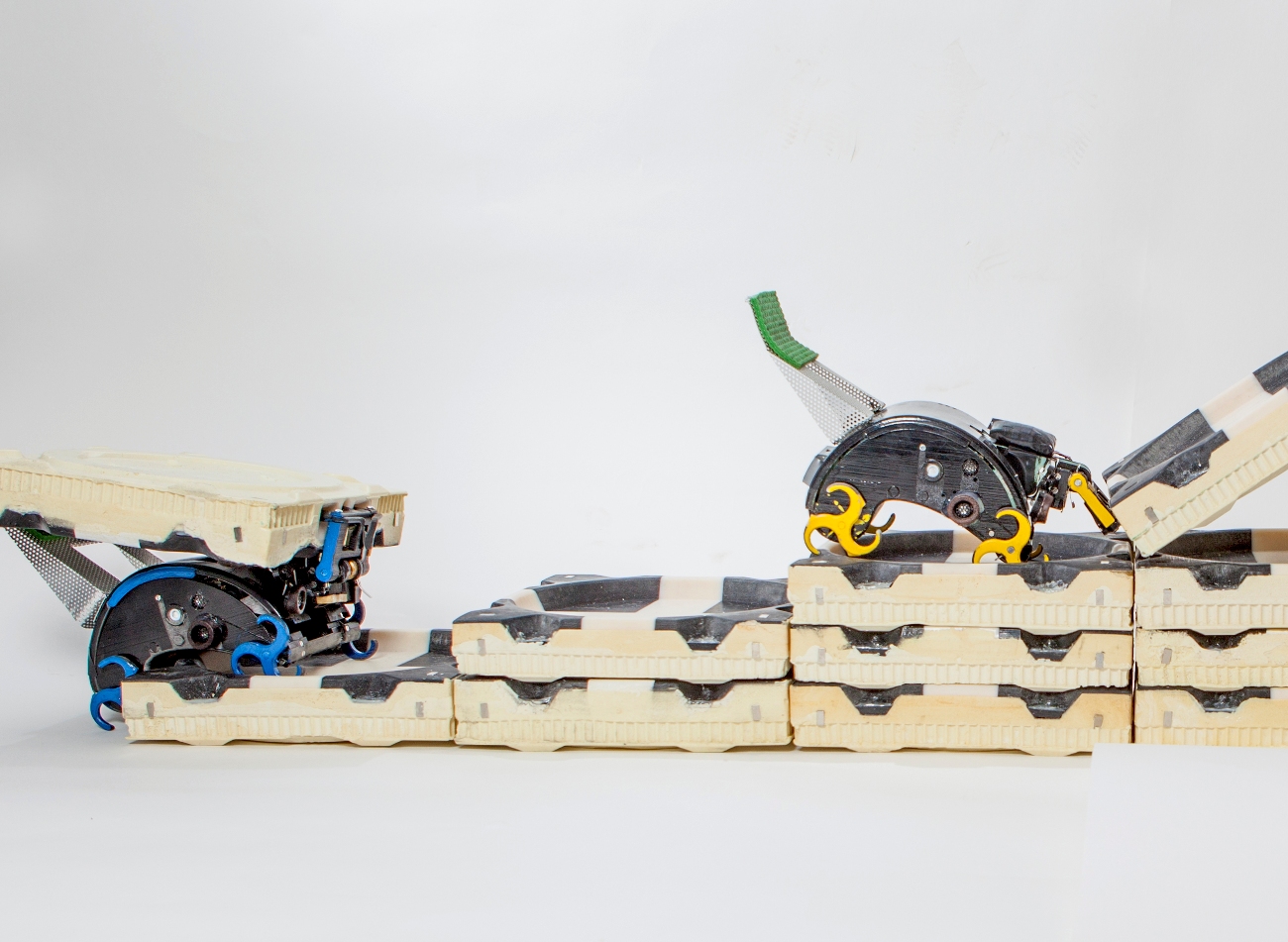
Исследователи из Гарвардского университета разработали систему, вдохновленную поведением термитов, для автономного строительства сложных структур. Небольшие роботы, оснащенные простыми сенсорами и манипуляторами, способны совместно возводить трехмерные конструкции из стандартизированных блоков без централизованного плана или координации.
Каждый робот принимает решения на основе локальной информации о структуре, которую он строит. Он определяет, куда поместить следующий блок, основываясь на том, что уже построено, а не на предварительно запрограммированной последовательности действий. Это позволяет системе адаптироваться к непредвиденным обстоятельствам, например, если один из роботов выходит из строя или если в конструкции обнаруживается дефект.
Хотя проект изначально разрабатывался для строительства в экстремальных условиях (например, на других планетах), его принципы уже находят применение в модульном строительстве и производстве крупногабаритных композитных конструкций.
Технические вызовы и пути их решения
Хотя мобильная и роевая робототехника демонстрирует значительный потенциал, ее промышленное внедрение сталкивается с рядом сложных технических проблем.
1) Энергетическая автономность
Мобильные роботы, в отличие от стационарных аналогов, вынуждены нести источник энергии с собой, что ограничивает их рабочее время и производительность. Для преодоления этого ограничения разрабатываются инновационные решения.
Одним из перспективных направлений является беспроводная зарядка "на ходу", при которой в пол производственных помещений встраиваются индукционные панели, позволяющие роботам пополнять заряд батарей во время движения. Другой подход предполагает использование быстросменных аккумуляторных блоков, которые роботы могут самостоятельно заменять на специализированных станциях.
Значительное внимание уделяется разработке энергоэффективных алгоритмов, оптимизирующих маршруты движения и вычислительные процессы. Дополнительным решением становится применение гибридных энергосистем, сочетающих аккумуляторы с суперконденсаторами для оптимального распределения нагрузки.
Современные алгоритмы позволяют роботам планировать свои действия с учетом энергопотребления. Например, они могут выбирать маршруты, проходящие через зоны зарядки, или делегировать энергоемкие задачи роботам с более высоким уровнем заряда.
2) Надежность и отказоустойчивость
В промышленных условиях крайне важна бесперебойная работа робототехнических систем. Для обеспечения надежности используются различные стратегии.
Принцип избыточности предполагает наличие в системе большего количества роботов, чем требуется для выполнения текущих задач. Это позволяет динамически перераспределять функции в случае выхода отдельных единиц из строя.
Современные роботы оснащаются системами самодиагностики, способными заранее выявлять потенциальные неисправности и инициировать превентивное обслуживание.
Модульная конструкция роботов упрощает процесс ремонта, позволяя быстро заменять неисправные компоненты без длительного простоя.
Ключевое преимущество роевых систем заключается в их устойчивости к отказам - производительность снижается пропорционально количеству вышедших из строя единиц, но система продолжает функционировать.
3) Безопасность взаимодействия с людьми
С увеличением мобильности роботов особую актуальность приобретает обеспечение безопасности их совместной работы с людьми.
Многоуровневая система защиты включает физические, сенсорные, алгоритмические и коммуникационные решения. Роботы проектируются с закругленными формами и мягкими поверхностями, а их движение ограничивается по силе и скорости. Множество дублирующих датчиков обеспечивают надежное обнаружение людей и препятствий.
Алгоритмы предсказания движения позволяют роботам заранее корректировать траекторию, избегая опасных ситуаций. Визуальные и звуковые сигналы делают поведение роботов более понятным для человека.
Безопасность - это не только предотвращение столкновений, но и создание комфортной среды взаимодействия, где намерения роботов понятны, а их присутствие не вызывает дискомфорта.
4) Стандартизация и совместимость
Широкое внедрение мобильной робототехники требует разработки единых стандартов, обеспечивающих совместимость решений разных производителей.
Международные организации ISO и IEC работают над созданием унифицированных протоколов коммуникации, интерфейсов для сменных модулей, стандартов безопасности и форматов обмена данными.
Стандартизация является ключевым фактором, позволяющим предприятиям интегрировать роботов различных производителей в единые системы без риска возникновения проблем совместимости.
Эти технические вызовы требуют комплексного подхода, но их успешное преодоление откроет новые возможности для автоматизации промышленных процессов.

Экономические и социальные аспекты
1) Трансформация бизнес-моделей
Развитие мобильной и роевой робототехники кардинально меняет экономику производственного сектора. На смену традиционной модели с крупными капитальными вложениями в стационарное оборудование приходит гибкий подход, позволяющий предприятиям постепенно наращивать автоматизацию, добавляя роботов по мере необходимости.
Особое значение приобретает модель "роботы как услуга" (RaaS), где компании арендуют робототехнические системы, оплачивая только фактическое использование. Это значительно снижает финансовые барьеры для малых и средних предприятий, делая автоматизацию доступной для более широкого круга производителей.
Технологический прогресс открывает возможности для гиперкастомизации - экономически эффективного производства индивидуализированных продуктов мелкими партиями. Одновременно происходит переход к распределенной модели производства, когда вместо крупных централизованных заводов создаются сети небольших гибких фабрик, расположенных ближе к конечным потребителям.
Мобильная робототехника делает для производства то же, что интернет сделал для информации - демократизирует доступ и резко снижает транзакционные издержки. Мы стоим на пороге новой промышленной революции с распределенными, доступными по требованию производственными мощностями.
2) Влияние на рынок труда
Внедрение передовых робототехнических систем оказывает многогранное воздействие на сферу занятости:
- Характер труда трансформируется - сокращается потребность в физическом труде и рутинных операциях, одновременно возрастает спрос на творческое мышление, принятие решений и социальные навыки. На рынке появляются совершенно новые профессии: инженеры по роевым алгоритмам, специалисты по взаимодействию человека и робота, аналитики данных роботизированных систем.
- Требования к квалификации работников существенно повышаются - непрерывное обучение и адаптация к новым технологиям становятся необходимостью даже для традиционных рабочих специальностей. Происходит географическое перераспределение рабочих мест - производство возвращается в развитые страны, но с принципиально иной структурой занятости.
Ключевой вопрос заключается не в том, заменят ли роботы людей, а в том, как будет организовано их взаимодействие. Технологии могут как дополнять человеческий труд, повышая его производительность, так и вытеснять его. Перед обществом стоит задача сознательно выбрать первый сценарий.
Для успешной адаптации к этим изменениям потребуются значительные инвестиции в образование и переподготовку. Особую важность приобретут навыки системного мышления, программирования, решения нестандартных задач, эффективной коммуникации и способности к постоянному обучению. Эти компетенции станут основой профессионального успеха в условиях технологической трансформации рынка труда.

Экологические аспекты
Современные мобильные и роевые робототехнические системы открывают новые возможности для экологизации промышленного производства. Их применение позволяет существенно снизить негативное воздействие на окружающую среду по нескольким ключевым направлениям.
1) Энергетическая эффективность
Благодаря интеллектуальному управлению и оптимизации производственных процессов мобильные роботы способны сократить энергопотребление на 15-30% по сравнению с традиционными автоматизированными системами. Это достигается за счет рационального планирования маршрутов, адаптивного энергопотребления и коллективного распределения задач.
2) Минимизация производственных отходов
Высокая точность операций и встроенные системы адаптивного контроля качества позволяют значительно сократить процент брака и количество отходов производства. Роевые системы особенно эффективны для прецизионных операций, где требуется высокая повторяемость и точность.
3) Устойчивость производственных систем
Модульная архитектура роботов продлевает жизненный цикл оборудования - вместо полной замены системы можно модернизировать отдельные компоненты. Это сокращает объемы электронных отходов и потребление ресурсов на производство нового оборудования.
4) Оптимизация ресурсопотребления
Интеллектуальные алгоритмы роевых систем постоянно анализируют и оптимизируют использование материалов и энергии, находя наиболее эффективные способы выполнения производственных задач с минимальным экологическим следом.
Роевые технологии идеально соответствуют принципам циркулярной экономики. Их адаптивность и гибкость открывают новые возможности для автоматизации процессов разборки и переработки продукции, которые традиционно сложно поддавались автоматизации из-за высокой вариативности входных условий.
Эти экологические преимущества делают мобильную и роевую робототехнику важным инструментом перехода к устойчивому производству, позволяющим совмещать экономическую эффективность с экологической ответственностью.
Заключение
Мобильная автономность и роевой интеллект представляют собой не просто очередной этап эволюции промышленной робототехники, а фундаментальную смену парадигмы — переход от жестких, централизованных систем автоматизации к гибким, адаптивным, самоорганизующимся структурам.
Андрей Повный