

Робот: Исполнительное устройство с двумя или более программируемыми степенями подвижности, обладающее определенным уровнем автономности и способное перемещаться во внешней среде с целью выполнения поставленных задач.
Согласно Робототехническому институту США (1979 год): "Робот - это перепрограммируемый, многофункциональный манипулятор, предназначенный для перемещения материала, деталей, инструментов или специализированных устройств с переменными программированными движениями для выполнения различных задач".
Робототехническое устройство: Исполнительное устройство, обладающее свойствами промышленного или сервисного робота, но у которого отсутствует требуемое число программируемых степеней подвижности или определенный уровень автономности.
ГОСТ Р 60.0.3.1-2016 Роботы и робототехнические устройства. Виды испытаний
Робот: Приводной механизм, программируемый по двум и более осям, имеющий некоторую степень автономности, движущийся внутри своей рабочей среды и выполняющий задачи по предназначению.
Примечание 1 - Робот включает систему управления и интерфейс системы управления.
Примечание 2 - Подразделение роботов на промышленных роботов и обслуживающих роботов производится в соответствии с их предназначением.
Роботизированное устройство: Приводной механизм, имеющий характеристики промышленного робота или обслуживающего робота. Может иметь непрограммируемые оси или недостаточную степень автономности.
Пример - Усилительное устройство; устройство с телеуправлением; двухосный промышленный манипулятор.

Промышленный робот: Автоматически управляемый, перепрограммируемый, многоцелевой манипулятор, программируемый по трем и более осям. Он может быть либо зафиксирован в заданном месте, либо может иметь возможность передвижения для выполнения промышленных задач по автоматизации.
Примечание 1 - Промышленный робот включает: - манипулятор, включая исполнительные механизмы; - контроллер, включая подвесной пульт обучения и интерфейс связи (электронное оборудование и программное обеспечение).
Примечание 2 - Данный объект может иметь дополнительные интегрированные оси.
Робототехническая система: Система, включающая роботов, рабочие органы роботов, а также машины, оборудование, устройства и датчики, поддерживающие роботов во время работы.
Промышленная робототехническая система: Система, включающая промышленных роботов, рабочие органы роботов, машины, оборудование, устройства, внешние вспомогательные оси и датчики, поддерживающие роботов во время работы.
ГОСТ Р ИСО 8373-2014 Роботы и робототехнические устройства. Термины и определения
Промышленный робот
Автоматическая машина, стационарная или передвижная, состоящая из исполнительного устройства в виде манипулятора, имеющего несколько степеней подвижности, и перепрограммируемого устройства программного управления для выполнения в производственном процессе двигательных и управляющих функций.
Примечание: Перепрограммируемость - свойство промышленного робота заменять управляющую программу автоматически или при помощи человека-оператора. К перепрограммированию относится изменение последовательности и (или) значений перемещений по степеням подвижности и управляющих функций с помощью средств управления на пульте устройства управления.
ГОСТ 25686-85. Манипуляторы, автооператоры и промышленные роботы. Термины и определения (с Изменением N 1)
Робототехника - раздел фундаментальной и прикладной науки, который занимается проектированием, производством и применением автоматических и автоматизированных технических систем - роботов. Робот - это перепрограммируемое механическое устройство целевого назначения, способное действовать без помощи человека.
Justin J. Crom BASIC Face-off // PC Tech Journal. - 1987, September. - P. 136. - (Пер. B.H. Лопухов).
При возникновении в современной робототехнике робот определялся как автоматическая машина для осуществления механических действий подобных тем, которые производит человек, выполняющий физическую работу. Именно стремление заменить человека прежде всего на тяжелых и опасных работах и породило идею робота. Однако в современной робототехнике определение робота следует существенно расширить, т.к. роботы далеко вышли за габаритные размеры человека. Предмет современной робототехники - это технические аналоги объектов всего живого мира, включая, кончено, и человека.
Юревич Е. И. Основы робототехники: учеб. пособие. - 4-е издание., перераб. и доп. - Спб.: БХВ-Петербург, 2018.
Термин «робот» славянского происхождения. Его ввел известный писатель Карел Чапек в пьесе «R.U.R.» (Россумские универсальные роботы). Этим словом были названы механические роботы, предназначенные для замены людей на тяжелых физических работах. Технический термин «промышленный робот» появился в 70-х годах XX столетия. Однако можно считать, что корни робототехники уходят в глубокую древность, когда были предприняты первые попытки создания человекоподобных устройств, подвижных культовых фигур, механических слуг.

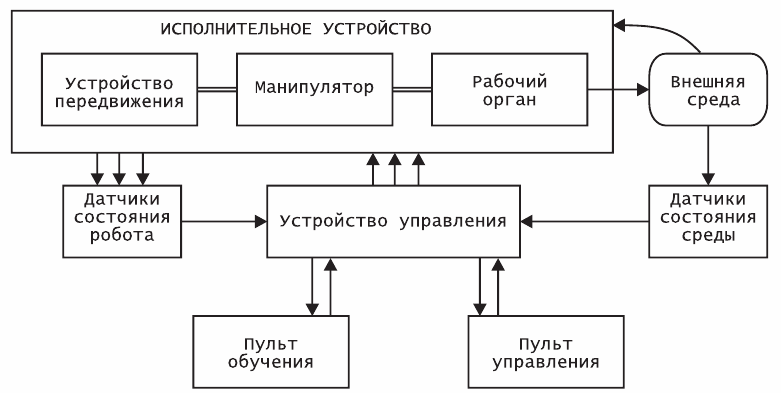
Робот — это технический комплекс, предназначен для выполнения различных движений и некоторых интеллектуальных функций, которые свойственны человеку. Робот снабжен необходимыми для этого исполнительными устройствами, управляющими и информационными системами, а также средствами решения вычислительно-логических задач. Основными компонентами робота являются манипуляционный механизм и автоматическая система управления, которая включает микроЭВМ или комплекс микропроцессоров, а в ряде случаев включает и сенсорное устройство.
Структурная схема промышленного робота:
Булгаков А. Г., Воробьев В. А. Промышленные роботы. Кинематика, динамика, контроль и управление. Серия «Библиотека инженера». — М.: СОЛОН-ПРЕСС, 2008.
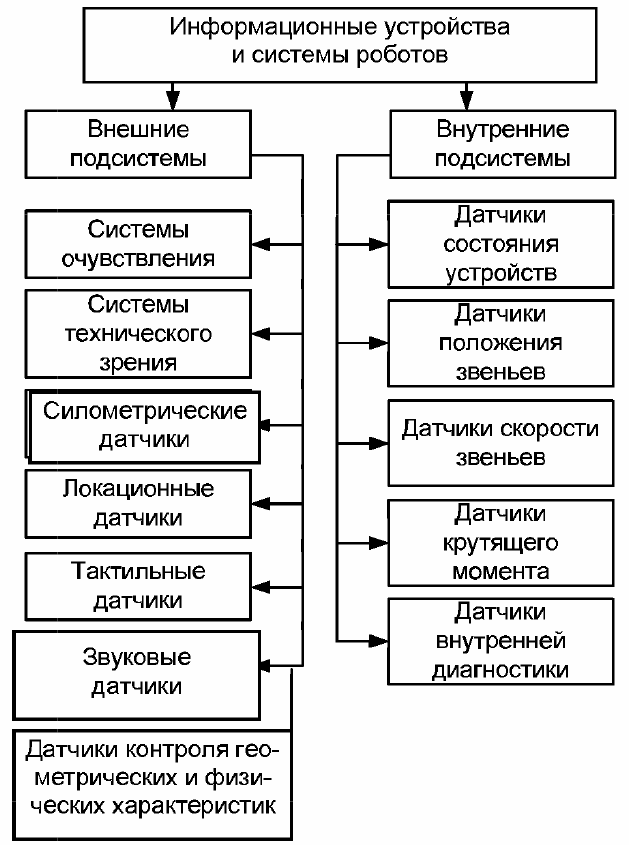
Классификация информационных устройств и систем, используемых в промышленных роботах:
В.И. Сырямкин. Информационные устройства и системы в робототехнике и мехатронике
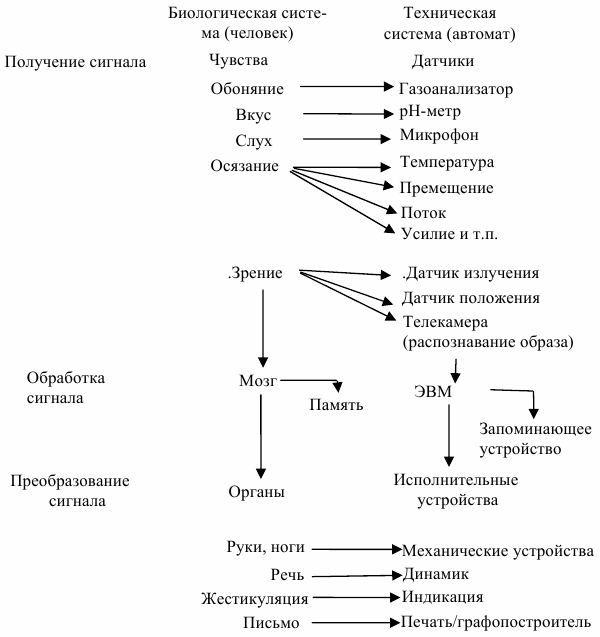 Аналогия между процессами получения, обработка и преобразования сигналов в биологических и технических системах (человек и робот)
Аналогия между процессами получения, обработка и преобразования сигналов в биологических и технических системах (человек и робот)
Законы робототехники
1. Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
2. Робот должен повиноваться всем приказам, которые даёт человек, кроме тех случаев, когда эти приказы противоречат Первому Закону.
3. Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому и Второму Законам.
Айзек Азимов, 1965
Статьи по этой теме:
Промышленные роботы в современном производстве - виды и устройство