

Мобильные машины, роботы и различные мехатронные системы имеют возможность передвигаться или изменять положение своих частей благодаря исполнительным механизмам. Направление перемещения той или иной части системы именуется степенью свободы, и чем больше степеней свободы у исполнительного механизма — тем больше у машины, робота или исполнительного устройства подвижность.
В зависимости от типа исполнительного устройства, достигается более или менее качественная реализация взаимодействия частей машины друг с другом, а также эффективность и гибкость ее работы. Подбор типа исполнительного устройства является сложной задачей, которая решается на этапе конструирования системы инженерами робототехниками и технологами.

Один из популярных типов исполнительных устройств, применяемых в мехатронных системах — пневматическое исполнительное устройство. В качестве рабочего тела здесь используется газ, обычно это сжатый воздух, энергия которого и приводит механизм в движение. Вот почему пневматические исполнительные устройства отличаются дешевизной, надежностью, простотой настройки и управления, а также пожаробезопасностью. Затраты на приобретение и утилизацию рабочего тела (воздуха) отсутствуют.
Однако есть и некоторые недостатки, например возможно снижение рабочего давления из-за утечки в связи с плохой герметичностью трубок, что ведет к потерям мощности и скорости, а также усложнению позиционирования. Тем не менее, пневмомоторы, пневмоцилиндры и момнетальные пневмодвигатели находят сегодня достаточно широкое применение в роботах и мобильных машинах.
Давайте рассмотрим устройство типичного пневмопривода. Пневматический привод как таковой обязательно включает в себя компрессор и пневмодвигатель. В данном сочетании система способна осуществлять преобразование механической характеристики привода в соответствии с требованиями нагрузки.
Пневмоприводы поступательного движения бывают двухпозиционными, когда перемещение рабочего органа осуществляется между двумя крайними положениями, а также многопозиционными, когда перемещение происходит в различные положения.
По принципу действия пневмоприводы могут быть одностороннего действия (когда возврат в исходное положение обеспечивает пружина) или двухстороннего действия (возврат, как и рабочее движение, производятся сжатым воздухом). Пневмоприводы поступательного движения подразделяются главным образом на два типа: поршневые и мембранные.
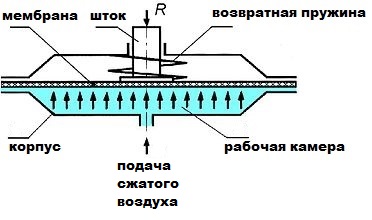
У поршневого пневмопривода в цилиндре под действием сжатого воздуха или пружины (обратный ход у привода одностороннего действия обеспечивается пружиной) перемещается поршень. У мембранного пневмопривода разделенная мембраной на две полости камера имеет с одной стороны давящий на мембрану сжатый воздух, а с другой стороны к мембране прикреплен шток, принимающий от мембраны продольное усилие. Так, пневмотический привод успешно находит применение в системах с цикловым управлением, например в манипуляторах с горизонтальным перемещением штока.
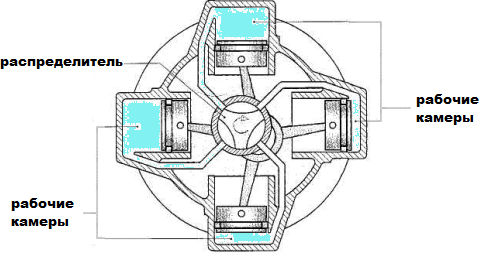
Функционально пневмопривод можно разделить на четыре блока: блок подготовки воздуха, блок распределения сжатого воздуха, блок исполнительных двигателей, и система передачи сжатого воздуха в исполнительные устройства.
В блоке подготовки воздуха воздух осушается и очищается от пыли. Распределительный блок по программе открывает или закрывает (при помощи клапанов) подачу сжатого воздуха в полости исполнительных двигателей.
Управление клапанами обычно производится с помощью электромагнитов или также пневматическим способом (если среда взрывоопасная). Блок исполнительных двигателей — это по сути цилиндры с поршнями, которые вращаются либо движутся прямолинейно — пневмоцилиндры, отличающиеся заданными перемещениями, усилиями и скоростями.
Каждый двигатель имеет свой рабочий цикл, причем последовательность циклов строго определена технологическим процессом и контролируется соответствующей программой системы управления роботом. Система передачи сжатого воздуха в разные устройства использует пневмоприводы с разным сечением, в соответствии с поставленной задачей.

В целом передача и преобразование энергии в пневмоприводе выглядит так. Главный приводной двигатель вращает компрессор, который сжимает воздух. Сжатый воздух затем подается через регулирующую аппаратуру в пневмодвигатель, где его энергия преобразуется в механическую (движение поршня, штока). После — рабочий газ выбрасывается в окружающую среду, то есть в компрессор он уже не возвращается.
Достоинства пневматических исполнительных устройств трудно переоценить. По сравнению с жидкостями, воздух более сжимаем, менее плотен и вязок, более текуч. Вязкость воздуха возрастает с увеличением давления и температуры.
Но поскольку воздух всегда содержит в небольшом количестве водяной пар и не имеет смазочных свойств, то имеется риск вредного влияния конденсата на рабочие поверхности камер. Поэтому пневматические приводы нуждаются в кондиционировании воздуха, то есть в предварительном придании ему таких свойств, чтобы продлить срок службы привода в котором он используется в качестве рабочего тела.