

Поскольку роботы не являются живыми организмами как человек, они не имеют глаз и мозга, и для получения визуальной информации им необходимы специальные технические сенсорные устройства, которые называются системами технического зрения.
Именно системы технического зрения позволяют роботам получать изображения рабочих объектов и сцен, преобразовывать их, обрабатывать и интерпретировать при помощи набора цифровых устройств, чтобы затем исполнительное устройство робота могло бы, в соответствии с этими данными, адекватно выполнять работу.
По сравнению с многочисленными чувствительными системами, именно системы технического зрения способны поставлять до 90% визуальной информации роботу, чтобы он мог нормально функционировать. Таким образом задача реализации машинного зрения решается в несколько шагов: информация принимается, обрабатывается, затем сегментируется и описывается, после чего распознается и интерпретируется.
Изначальная информация, поставляемая в форме цифрового изображения, предварительно обрабатывается, из нее убираются помехи, повышается качество изображения отдельных элементов сцены или объекта. После этого информация делится на сегменты — сцена условно разбивается на части, которые распознаются как отдельные элементы, каждый из которых может быть распознан, а затем выделяются непосредственно интересующие объекты.
Выделенные объекты исследуются по характерным параметрам, которые описываются массивами информации, чтобы далее можно было выделить требуемые объекты по параметрам. Требуемые объекты выделяются и идентифицируются при помощи программы. Наконец, идентифицированные объекты интерпретируются и помечаются как принадлежащие к той или иной группе распознаваемых, после чего устанавливаются их зрительные образы.

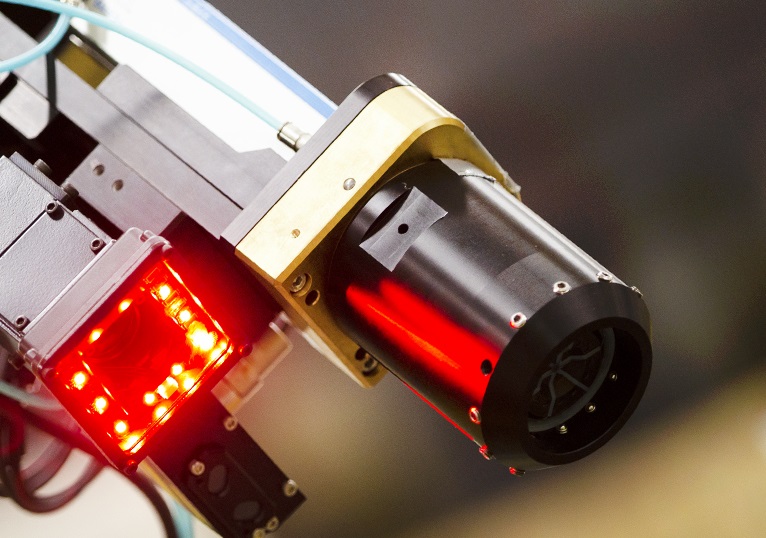
В системе технического зрения информация об изображении, при помощи оптико-электронных преобразователей и видеодатчиков, представляется в форме электрических сигналов. Это по существу первичное преобразование. Обычно изображение считывается при помощи оптической камеры, чувствительного элемента, сканирующего устройства, затем сигнал усиливается.
Полученная таким образом информация обрабатывается иерархически. Сначала изображение обрабатывается видеопроцессорами. Здесь ключевой параметр — контур изображения, который задается координатами множества составляющих его точек. Далее компьютером, входящим в состав системы, формируются управляющие сигналы для робота.
Видеодатчики присоединяются к другим частям системы технического зрения при помощи особых кабелей, например оптоволоконных, через которые информация передается на высокой частоте и с минимальными потерями.
Сами видеодатчики могут иметь точечные, одномерные или двумерные чувствительные элементы. Точечные чувствительные элементы способны принимать видимое излучение с мелких частей объекта, и для получения полного растрового изображения необходимо произвести сканирование по плоскости.
Одномерные чувствительные элементы более сложны, они состоят из линейки точечных элементов, которые в процессе сканирования движутся относительно объекта. Двумерные элементы представляют собой по сути матрицу дискретных точечных элементов.
Оптическая система проецирует изображение на чувствительный элемент, предварительно определяется размер рабочей зоны охватываемой датчиком. Оптическая система имеет линзовый объектив с настраиваемой диафрагмой, чтобы производить регулировку количества поступающего света и фокусировку четкости когда расстояние от объектива до объекта изменяется.
Видеодатчиками могут выступать различные оптоэлектронные устройства, от твердотельных преобразователей до телевизионных камер на основе вакуумной трубки типа видикон. Основой технического зрения являются восприятие и предварительная обработка информации данными датчиками без необходимости прибегать к искусственному интеллекту.
Это низший уровень системы. Далее идет анализ, описание и распознавание — здесь используются современные компьютеры и сложное программно-алгоритмическое обеспечение — средний уровень. Высший уровень — это уже искусственный интеллект.
Практически в промышленных роботах получили широкое распространение системы технического зрения первого поколения, обеспечивающие надлежащее качество работы с плоскими изображениями и объектами простых форм. Они служат в распознавании, сортировке и укладке деталей, в проверке размеров деталей, сопоставлении их с чертежом и т. д.
Типичная реализация системы технического зрения выглядит так. Рабочая зона робота, где располагаются детали, освещается лампами. Над рабочей зоной располагается наблюдающая подвижная телекамера, от которой по кабелю видеоинформация подается в основной блок системы технического зрения.
Из основного блока информация (в обработанной форме) подается на управляющее устройство робота. Устройство производит сортировку деталей, их упорядоченную укладку в тару в строгом соответствии с информацией поступающей от программного обеспечения системы технического зрения.
Активно разрабатываемые сегодня интеллектуальные и адаптивные роботы на основе систем второго и третьего поколения, способны работать с трехмерными изображениями и более сложными объектами, производить более точные измерения, более внимательно и быстро распознавать объекты.
Главное направления научно-технического поиска сегодня — совершенствование систем технического зрения и программно-алгоритмического обеспечения к ним, создание специальных компьютеров, а также принципиально новых систем технического зрения, ведь применение робототехники все больше востребовано и область ее промышленного внедрения непрерывно расширяется.
Сегодня ведутся разработки более совершенных чувствительных устройств для роботов, способные передавать как можно больше внешней информации роботу. Уже понятно, что сложные сенсоры в принципе могут воспринимать сцены и образы целиком, а это значит, что в перспективе роботы смогут автономно формировать целенаправленные действия в пространстве рабочей зоны без дополнительных внешних стимулов.
Смотрите также: Что такое машинное зрение и чем оно может помочь?