

Функция ПИД-регулирования может использоваться при управлении процессами поддержания давления, расхода, температуры и т.п. Блок-схема частотно-регулируемого электропривода с ПИД-регулированием приведена на рис. 1.
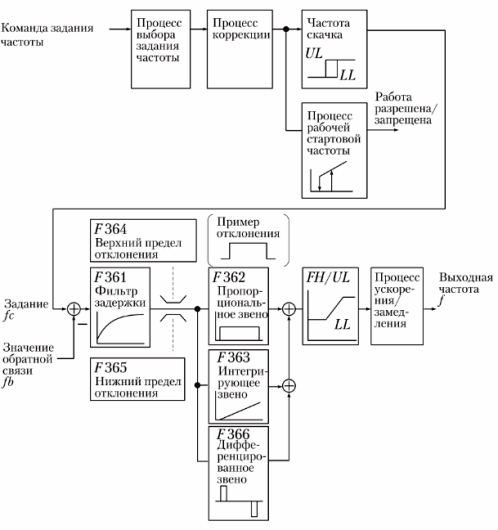
Рис. 1. Блок-схема ПИД-регулирования
Настройка ПИД-регулятора
Производится в соответствии с требованиями управляемой системы, сигналом задания и сигналом обратной связи. Подробно процедура настройки излагается в инструкции по эксплуатации конкретного преобразователя частоты.
Настраиваемые параметры для ПИД-регулирования приведены в табл. 1.
Таблица 1. Настраиваемые параметры ПИД-регулирования
| Название | Диапазон настройки |
| Фильтр задержки | 0 - 255 |
| Коэффициент пропорциональности (П) | 0,01 - 100 |
| Коэффициент интегрирования (И) | 0,01 - 100 |
| Верхний предел отклонения | 0 - 50 |
| Нижний предел отклонения | 0 - 50 |
| Коэффициент дифференцирования (Д) | 0 - 2,55 |
Настройка пропорционального звена
Пропорциональное звено (П) усиливает отклонение (разницу между заданием и сигналом обратной связи), чтобы ввести коррекцию для регулирования пропорционально отклонению. При увеличении его значения реакция на управляющее воздействие ускоряется, но чрезмерное увеличение коэффициента пропорциональности может вызвать нестабильную работу и колебания (рис. 2).
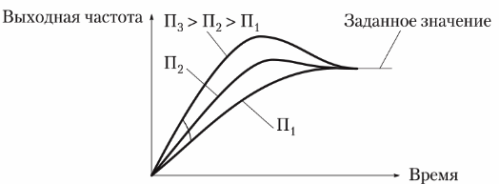
Рис. 2. Настройка пропорционального звена (П-звена) ПИД-регулятора
Настройка интегрирующего звена
Интегрирующее звено (И) сводит к нулю остаточное отклонение после пропорционального звена. Чем больше коэффициент интегрирования, тем меньше остаточное отклонение, но чрезмерное увеличение может вызвать нестабильную работу и колебания (рис. 3).
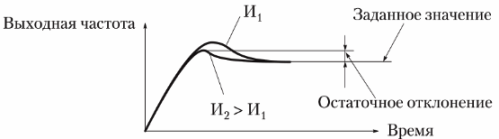
Рис. 3. Настройка интегрирующего звена (И-звена) ПИД-регулятора
Настройка дифференцирующего звена
Дифференцирующее звено (Д) улучшает реакцию системы, когда отклонения быстро меняются. Однако чрезмерное увеличение коэффициента дифференцирования может вызвать колебания выходной частоты.
Настройка фильтра задержки
Фильтр задержки предназначен для сдерживания быстро изменяющихся отклонений (звено запаздывания первого порядка). Если уменьшить задержку, процесс ускорится, и наоборот (рис. 4).
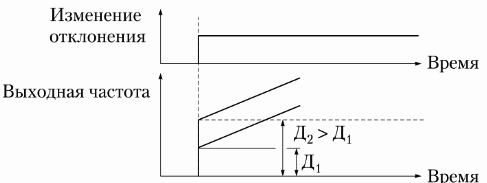
Рис. 4. Настройка фильтра задержки
Настройка сигнала обратной связи
Выбор сигнала ПИД-регулирования позволит указать источник сигнала обратной связи. При использовании аналогового входа устанавливают нулевое значения сигнала обратной связи в соответствие с частотой 0 Гц, а максимальное значение — соответствующее максимальной частоте. К примеру, в случае использования сигнала 4 - 20 мА устанавливают 20 % для 0 Гц и 100 % для максимальной частоты.

Настройка сигнала задания
Значение задания используется как команда задания частоты, установленная с помощью функции выбора задания скорости. Значение задания частоты задается как значение технологического параметра, к которому будет стремиться значение обратной связи. Задание также может быть установлено с помощью предустановленных скоростей.