

В процессе эксплуатации автоматизированного оборудования возникает необходимость контроля нагрузки, т. е. усилий и моментов, действующих в элементах станков и машин. Это предотвращает поломку отдельных деталей или недопустимую перегрузку электродвигателей, позволяет выбрать оптимальный режим работы станков, произвести статистический анализ условий эксплуатации и т. п.
Механические устройства контроля нагрузки
Очень часто устройства контроля нагрузки основываются на механическом принципе. В кинематическую цепь станка включают упругий элемент, деформация которого пропорциональна приложенной нагрузке. Превышение определенного уровня нагрузки приводит к срабатыванию микропереключателя, связанного с упругим элементом кинематической связью. В станкостроении получили широкое распространение устройства контроля нагрузки с кулачковыми, шариковыми или роликовыми муфтами. Их применяют в зажимных устройствах, гайковертах и других случаях, когда электропривод работает на жесткий упор.
Электрические устройства контроля нагрузки
Наличие чувствительного упругого элемента в кинематической цепи снижает общую жесткость электромеханического привода и ухудшает его динамические характеристики. Поэтому информацию о величине нагрузки (в данном случае крутящего момента) стараются получить электрическими методами, контролируя потребляемый приводным электродвигателем ток, мощность, скольжение, угол сдвига фазы и т. п.
На рис. 1, а показана схема контроля нагрузки по току статора асинхронного электродвигателя. Напряжение, пропорциональное току I статора электродвигателя, снимается со вторичной обмотки трансформатора тока ТА, выпрямляется и подается на слаботочное электромагнитное реле К, уставка которого регулируется потенциометром R2. Низкоомный резистор R1 необходим для шунтирования вторичной обмотки трансформатора, который должен работать в режиме короткого замыкания.
Рисунок 1. Схема контроля нагрузки электродвигателя по току статора
Для контроля тока статора применяют также быстродействующие защитные реле тока, описанные в гл. 7. Ток статора связан с моментом нагрузки на валу электродвигателя нелинейной зависимостью вида

где Iн - номинальный ток статора, Мн — номинальный момент, βо=Iо/Iн—кратность тока холостого хода.
Графически эта зависимость изображена на рис. 1, б (кривая 1). Из графика видно, что при малых нагрузках ток статора электродвигателя изменяется весьма незначительно, и регулировать нагрузку в этой зоне невозможно. Кроме того, ток статора зависит не только от момента, но и от напряжения сети. При понижении напряжения сети зависимость 1(М) изменяется (кривая 2), что вносит погрешность в работу схемы.
Ток статора электродвигателя представляет собой геометрическую сумму тока холостого хода и приведенного тока ротора:
При изменении нагрузки меняется ток I2' Ток холостого хода практически от нагрузки не зависит. Поэтому для увеличения чувствительности устройств контроля малых нагрузок необходимо компенсировать ток холостого хода, имеющий в основном индуктивный характер.
В электродвигателях малой мощности в цепь статора включают батарею конденсаторов С (штриховые линии на рис. 1, а), которая вырабатывает опережающий ток. В результате электродвигатель потребляет из сети ток, равный приведенному току ротора, а зависимость 1(М) становится почти линейной (кривая 3 ни рис. 1, б). Некоторым недостатком данного метода является более сильная зависимость характеристики нагрузки от колебаний напряжения сети.
В электродвигателях большей мощности конденстаторная батарея становится громоздкой и дорогой. В этом случае компенсацию тока холостого хода целесообразнее проводить в цепи вторичной обмотки трансформатора тока (рис. 2).
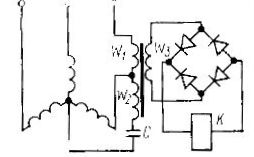
Рисунок 2. Реле контроля нагрузки с компенсацией тока холостого хода
В схеме используют трансформатор, имеющий две первичные обмотки: тока W1 и напряжения W2. В цепь обмотки напряжения включен конденсатор С, сдвигающий фазу тока на 90° в сторону опережения. Параметры трансформатора подобраны так, что намагничивающая сила обмотки W2 компенсирует ту составляющую намагничивающей силы обмотки W1, котораясвязана с током холостого хода электродвигателя. В результате напряжение на выходе вторичной обмотки W3 пропорционально току ротора и моменту нагрузки. Это напряжение выпрямляется и подается на электромагнитное реле К.

В системах управления станками применяют высокочувствительные реле нагрузки, имеющие явно выраженную релейную зависимость напряжения выхода от момента нагрузки (рис. 3, б). Схема такого реле (рис. 3, а) имеет трансформатор тока ТА и трансформатор напряжения TV, выходные напряжения которых включены встречно.
Рисунок 3. Высокочувствительное реле контроля нагрузки
Если ток холостого хода компенсирован, например, с помощью батареи конденсаторов С, выходное напряжение схемы

где Кта, Ктv—коэффициенты преобразования трансформаторов тока и напряжения, U1 — напряжение на фазе электродвигателя.
Изменяя Кта или Ktv, можно настроить схему так, чтобы при заданном моменте нагрузки Мср напряжение на выходе было минимальным. Тогда всякое отклонение режима от заданного приведет к резкому изменению Uвых и вызовет срабатывание реле К.
Подобные схемы применяют для контроля момента касания шлифовального круга с деталью при переходе от быстрого подвода шлифовальной бабки к рабочей подаче.
Более точно работают реле нагрузки, основанные на контроле мощности, потребляемой асинхронным электродвигателем из сети. Такие реле .имеют линейную характеристику, которая не изменяется при колебаниях напряжения сети.
Напряжение, пропорциональное потребляемой мощности, получают перемножением напряжения и тока статора асинхронного электродвигателя. Для этого используют реле нагрузки, основанные на нелинейных элементах с квадратичной вольт-амперной характеристикой — квадраторах. Принцип действия таких реле основан на тождестве (a + b)2 - (a - b)2 = 4ab.
Схема реле нагрузки изображена на рис. 4.
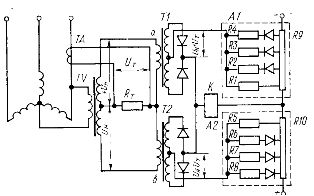
Трансформатор тока ТА, нагруженный на резистор RT и трансформатор напряжения TV образуют на вторичных обмотках напряжения, пропорциональные току и фазному напряжению электродвигателя. Трансформатор напряжения имеет две вторичные обмотки, на которых образуются равные напряжения -Uн и +Uн, сдвинутые по фазе на 180°.
Сумма и разность напряжений выпрямляется фазочувствительной схемой, состоящей из согласующих трансформаторов Т1 и Т2 и диодного моста, и подается на квадраторы А1 и А2, выполненные по принципу кусочно-линейной аппроксимации.
Квадраторы содержат резисторы R1 — R4 и R5 — R8 и вентили, запертые опорным напряжением, снимаемым с делителей R9, R10. По мере увеличения входного напряжения вентили поочередно открываются и в работу вводятся новые резисторы, включенные параллельно резисторам R1 или R5. В результате вольт-амперная характеристика квадратора имеет форму параболы, что обеспечивает квадратичную зависимость тока от входного напряжения. Выходное электромеханическое реле К включено на разность токов двух квадраторов, и в соответствии с основным тождеством ток в его обмотке пропорционален мощности, потребляемой электродвигателем из сети. При правильной настройке квадраторов реле мощности имеет погрешность менее 2%.
Особый класс образуют время-импульсные реле мощности с двойной модуляцией, которые получают все большее распространение. В подобных реле напряжение, пропорциональное току электродвигателя, подается на широтно-импульсный модулятор, вырабатывающий импульсы, длительность которых пропорциональна измеряемому току: τ = К1I . Эти импульсы поступают на амплитудный модулятор, управляемый напряжением сети.

В результате амплитуда импульсов оказывается пропорциональной напряжению на статоре электродвигателя: Um = K2U. Среднее значение напряжения после двойной модуляции пропорционально про наведению тока и напряжения: Uср = fK1K2TU, где f — частота модуляции. Подобные реле мощности имеют погрешность не более 1,5%.
Изменение механической нагрузки на валу асинхронного электродвигателя приводит к изменению фазы тока статора относительно напряжения сети. По мере увеличения нагрузки фазовый угол уменьшается. Это позволяет построить реле нагрузки на фазовом методе. В большинстве случаев реле реагируют на косинус угла сдвига фазы или коэффициент мощности. По своим характеристикам такие реле близки к реле мощности, но конструкция их значительно проще.
Если из схемы (см. рис. 4) исключить квадраторы А1 и А2, а согласующие трансформаторы T1 и T2 в ней заменить резисторами, то напряжение между точками а и b будет пропорционально cosфи, который также изменяется в функции нагрузки электродвигателя. Электромеханическое реле К, подключенное в точках а и b схемы, позволяет контролировать заданный уровень нагрузки электродвигателя. Недостатком упрощения схемы является повышенная погрешность, связанная с изменением напряжения сети.