

Наиболее простой и распространенной формой автоматического управления работой технических устройств является автоматическое регулирование, которым называется способ поддержания заданного параметра постоянным (например, скорости вращения вала, температуры среды, давления пара) или способ обеспечения его изменения по определенному закону. Оно может осуществляться соответствующими действиями человека или автоматически, т. е. при помощи соответствующих технических устройств — автоматических регуляторов.
Регуляторы, поддерживающие значение параметра постоянным, называются собственными, а регуляторы, обеспечивающие изменение параметра по определенному закону — программными.
В 1765 г. русским механиком И. И. Ползуновым был изобретен автоматический регулятор производственного назначения, который поддерживает приблизительно постоянным уровень воды в паровых котлах. В 1784 г. английский механик Дж. Уатт изобрел автоматический регулятор для поддержания постоянной скорости вращения вала паровой машины.
Процесс регулирования
Рассмотрим, как можно поддерживать температуру постоянной в камере, называемой термостатом, примером которого может быть камера инкубатора.

Инкубатор
Термостаты широко применяются в различных отраслях промышленного производства, особенно в пищевой промышленности. Наконец, термостатом в зимнее время можно считать и жилое помещение, если в нем при помощи специальных вентилей, имеющихся у радиаторов отопления, поддерживается постоянная температура. Покажем, как осуществляется неавтоматическое регулирование температуры в помещении.
Допустим, что желательно поддержать температуру, равную 20°С. За ней следят по комнатному термометру. Если она поднимается выше, то вентиль радиатора немного прикрывают. Этим замедляют поступление в последний горячей воды. Его температура понижается, а следовательно, уменьшается приток энергии в помещение, где температура воздуха также становится ниже.
Когда же температура воздуха в помещении оказывается меньше 20°С, то вентиль открывают и тем самым увеличивают поступление в радиатор горячей воды, благодаря чему температура в помещении повышается.
При таком регулировании происходят небольшие колебания температуры воздуха около заданного значения (в рассмотренном примере около 20°С).

Механический термостат
Из этого примера видно, что в процессе регулирования необходимо выполнить определенные действия:
- измерить регулируемый параметр;
- сравнить его значение с заданным (при этом определяется так называемая ошибка регулирования — разность между фактическим значением и заданным);
- воздействовать на процесс в соответствии со значением и знаком ошибки регулирования.
При неавтоматическом регулировании эти действия выполняет человек-оператор.
Автоматическое регулирование
Регулирование может осуществляться и без вмешательства человека, т. е. техническими устройствами. В этом случае говорят об автоматическом регулировании, которое осуществляется с помощью автоматического регулятора. Выясним, из каких частей он состоит и как эти части между собой взаимодействуют.
Измерение фактического значения регулируемого параметра осуществляется измерительным органом, называемым датчиком (в примере с инкубатором — датчиком температуры).
Результаты измерения выдаются датчиком в форме какого-либо физического сигнала (высота столба термометрической жидкости, деформация биметаллической пластины, значение напряжения или силы тока на выходе датчика и др.).
Сопоставление фактического значения регулируемого параметра с заданным производится специальным органом сравнения, называемым нуль-органом. При этом происходит определение разности между фактическим значением регулируемого параметра и заданным (т. е. необходимым) его значением. Эта разность называется ошибкой регулирования. Она может быть как положительной, так и отрицательной.
Значение ошибки регулирования преобразуется в определенный физический сигнал, который воздействует на исполнительный орган, управляющий состоянием объекта регулирования. Именно в результате воздействия исполнительного органа на объект происходит увеличение или уменьшение регулируемого параметра в зависимости от знака ошибки регулирования.
Таким образом, основными частями автоматического регулятора являются: измерительный орган (датчик), орган сравнения (нуль-орган) и исполнительный орган.
Для того чтобы нуль-орган мог сопоставлять измеренное значение регулируемой величины с заданным, необходимо в автоматический регулятор ввести задаваемое значение параметра. Это осуществляется с помощью специального устройства, так называемого задатчика, который преобразует автоматического регулирования задаваемое значение параметра в физический сигнал определенного уровня.
При этом важно, чтобы физические сигналы на выходах датчика и задатчика были одной и той же природы. Только в этом случае возможно их сопоставление нуль-органом.
Необходимо еще отметить, что мощность выдаваемого сигнала, соответствующего ошибке регулирования, как правило, недостаточна для управления работой исполнительного органа. В связи с этим указанный сигнал подвергается предварительному усилению. Следовательно, в состав автоматического регулятора, кроме указанных трех основных частей (датчика, нуль-органа и исполнительного органа), входят еще задатчик и усилитель.
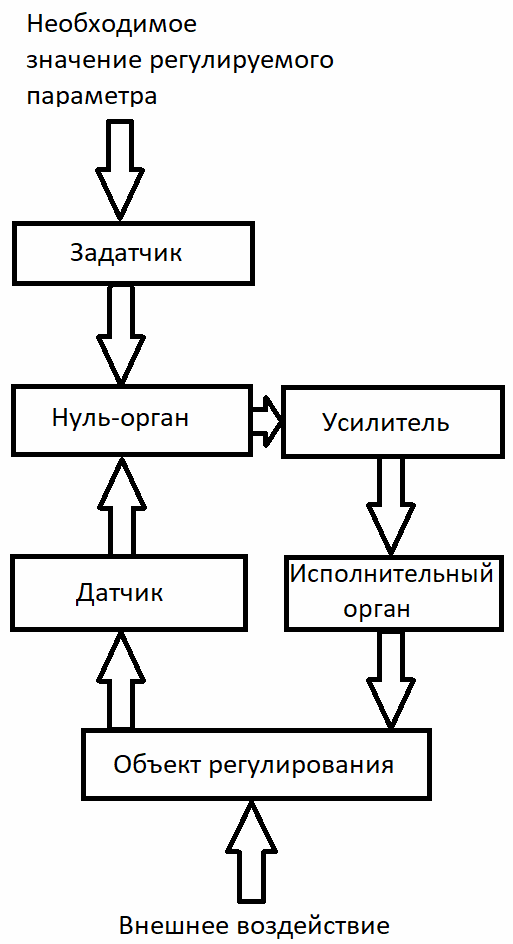
Типовая структурная схема системы автоматического регулирования
Как видно из этой схемы, система автоматического регулирования является замкнутой. От объекта регулирования информация о значении регулируемого параметра поступает к датчику, а затем в нуль-орган, далее сигнал, соответствующий ошибке регулирования, поступает через усилитель в исполнительный орган, который оказывает необходимое воздействие на объект регулирования.
Движение сигналов от объекта регулирования к нуль-органу — это обратная связь. Наличие обратной связи — необходимое условие для осуществления процесса регулирования. На такую замкнутую цепь влияют и внешние воздействия.
Во-первых (и это самое главное), внешним воздействиям подвергается объект регулирования. Именно эти воздействия являются причиной изменения параметров его состояния и вызывают необходимость в регулировании.
Во-вторых, внешним воздействием на цепь системы автоматического регулирования является введение в нуль-орган при помощи задатчика необходимого значения регулируемого параметра, которое определяется на основе анализа режима работы всей системы, куда входит данное автоматическое устройство. Этот анализ проводится человеком или управляющим компьютером.
Примеры автоматических регуляторов:
Устройство и принцип работы терморегулятора электрического утюга
Применение ПИД-регулятора в системах автоматики на примере ТРМ148 ОВЕН