

Для осуществления автоматизированного и высокоточного управления технологическими процессами, необходимо всегда иметь в распоряжении информацию о текущих значениях ключевых технологических параметров. Обычно для этой цели применяются различные датчики: силы, давления, крутящего момента и т. д. Давайте рассмотрим три вида датчиков, разберемся в принципе их работы.

Прежде всего отметим, что при построении датчиков силы или крутящего момента, используют чувствительные элементы, определенные свойства которых изменяются в соответствии с текущей степенью деформации, возникающей от того или иного внешнего воздействия.
Это могут быть упругие металлические пластины, пружины или валы, деформация которых передается на магнитострикционный, пьезоэлектрический или полупроводниковый элемент, электрические или магнитные параметры которого будут напрямую зависеть от степени деформации. Достаточно будет измерить этот параметр, чтобы получить представление о величине деформации и соответственно о силе (давлении, крутящем моменте).
Тензорезисторные датчики деформации
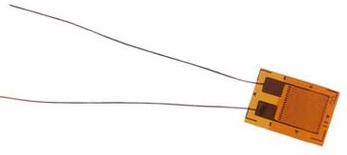
Простейший датчик деформации на основе тензорезисторного проволочного преобразователя включает в себя механический упругий элемент, который подвергается деформации, и закрепленный на нем тензорезисторный преобразователь, деформация которого непосредственно преобразуется в электрический сигнал.
В качестве тензорезисторного преобразователя выступает тонкая (диаметром от 15 до 60 мкм) нихромовая, константановая или элинваровая проволока, которая сложена змейкой и закреплена на пленочный подложке. Такой преобразователь приклеивают к поверхности, деформацию которой следует измерить.
Деформация механического упругого элемента приводит к растяжению либо сжатию проволоки по длине, при этом сечение ее уменьшается или увеличивается, что сказывается на изменении сопротивления преобразователя электрическому току.
Измерив это сопротивление (падение напряжения на нем), получаем представление о величине механической деформации и соответственно силы, при условии что механические параметры деформируемого элемента известны.
Тензорезисторные датчики крутящего момента

Для измерения момента силы применяют чувствительные упругие элементы в виде пружин или тонких валов, которые в ходе технологического процесса подвергаются скручиванию. Упругая угловая деформация, то есть относительный угол начала и конца пружины, измеряется и преобразуются в электрический сигнал.
Упругий элемент обычно заключают в трубу, один конец которой фиксируется неподвижно, а второй сопрягается с датчиком углового перемещения, измеряющим угол рассогласования между концами трубы и деформируемого элемента.
Так получается сигнал, несущий в себе информацию о величине крутящего момента. Для снятия сигнала с пружины выводы тензорезисторного элемента подключаются через контактные кольца к щеткам.
Магнитострикционные датчики силы
Существуют также датчики силы с тензочувствительными магнитострикционными преобразователями. Здесь используется явление обратное магнитострикции (эффект Виллари), которое заключается в том, что при давлении на сердечник из железоникелевого сплава, (такого как пермаллой) его магнитная проницаемость изменяется.
Продольное сжатие сердечника приводит к расширению его петли гистерезиса, крутизна петли уменьшается, что вызывает снижение величины магнитной проницаемости, соответственно — к уменьшению индуктивности либо взаимной индуктивности обмоток датчика.
Поскольку магнитные характеристики нелинейны, а также из-за того, что на них существенно влияет температура, возникает необходимость в применении схемы компенсации.
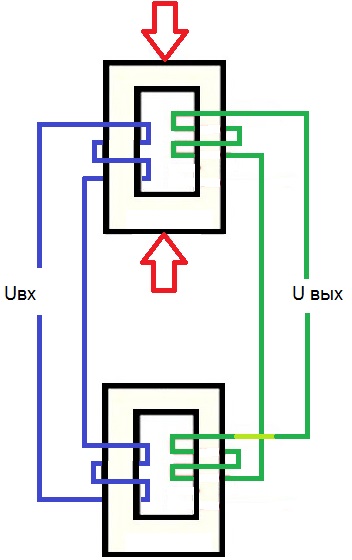
Для компенсации применяется следующая общая схема. Замкнутый магнитострикционный магнитопровод из никель-цинкового феррита подвергается действию измеряемой силы. Аналогичный сердечник не испытывает давления силы, но обмотки на обоих сердечниках соединяются друг с другом так, чтобы возникало изменение суммарной ЭДС.
Первичные обмотки идентичны и соединены последовательно, они питаются переменным током с частотой в пределах десятка килогерц, тогда как вторичные обмотки (тоже одинаковые) включаются встречно, и в отсутствие деформирующей силы общая ЭДС равна 0. Если же давление на первый сердечник возрастает, суммарная ЭДС на выходе не равна нулю и пропорциональна деформации.
Андрей Повный