

Электроактивные полимеры (ЭАП, EAP) при стимуляции электрическим полем демонстрируют изменение своих размеров и формы, имитируя работу живых мышц. Они преобразуют электрическую энергию в механическую.
Сегодня известны электроактивные полимерные материалы нескольких классов: электронные, ионные, на основе углеродных нанотрубок и даже на базе проводящих полимеров. Работы по улучшению электромагнитных свойств таких материалов ведутся непрерывно.
В итоге, некоторые электроактивные полимеры уже сегодня демонстрируют лучшие электромагнитные характеристики, нежели даже кристаллы и керамика. На их основе создаются приводы, датчики и преобразователи. Сегодня некоторые электроактивные полимеры используются в робототехнике в качестве линейных приводов.

Искусственные мышцы
Электроактивные полимеры могут найти самое широкое и жизнеспособное применение, включая искусственные мышцы, тактильные дисплеи, микрожидкостные устройства и огромное количество других приложений, учитывая, что они относительно недороги и имеют короткие сроки изготовления.
В искусственных мышцах используются различные искусственные материалы и внешние раздражители (обычно напряжение, ток, давление, температура и т. д.), чтобы заставить материал достигать эффектов сжатия, удлинения, вращения и т. д. Эти три эффекта движения можно комбинировать друг с другом для имитации мышц человеческого тела.
Электрические искусственные мышцы в основном возбуждают специальный полимер, чтобы он при пропускании электрического тока сокращался, изгибался и деформировался.
Сегнетоэлектрические полимеры
Электроактивные полимеры подразделяются на сегнетоэлектрические, диэлектрические и вязкоупругие эластомеры.
Наиболее распространенный сегнетоэлектрический полимер — пливинилденфторид или ПВДФ. Обычно он используется в виде листа с металлическими электродами, повышающими жесткость и уменьшающими пьезоэлектрический отклик.
Сегнетоэлектрики хороши тем, что допускает эксплуатацию в вакууме, на открытом воздухе и даже в воде, причем в широком температурном диапазоне.

Диэлектрические электроактивные полимеры работают благодаря электростатическим силам. Они, обычно, представляют собой пленку, установленную между двумя электродами.
Суть в том, что когда диэлектрик подвергается действию электрического поля, на его поверхности появляются положительные и отрицательные электрические заряды, между которыми начинает действовать кулоновская сила.
Кулоновская сила создает напряжение, что и приводит к деформации пленки.
Итак, когда на электроды подается напряжение, электрическое поле между электродами изменяется, форма эластомера также изменяется. Таким образом, электроактивные диэлектрические полимеры могут быть использованы в качестве исполнительных механизмов.
Вязкоупругие эластомеры
Наиболее популярным электроактивным полимером сегодня является вязкоупругий эластомер. Он состоит из силиконового эластомера и электродов. Когда между электродами начинает действовать электрическое поле, изменяется модуль сдвига.
Такие электроактивные полимеры могут работать в течение длительного промежутка времени и иметь быстрый отклик. Они выдерживают высокие напряжения, учитывая, что для работы им требуется напряженность электрического поля порядка 150МВ/м. Ограничение накладывается низкой температурой стеклования.
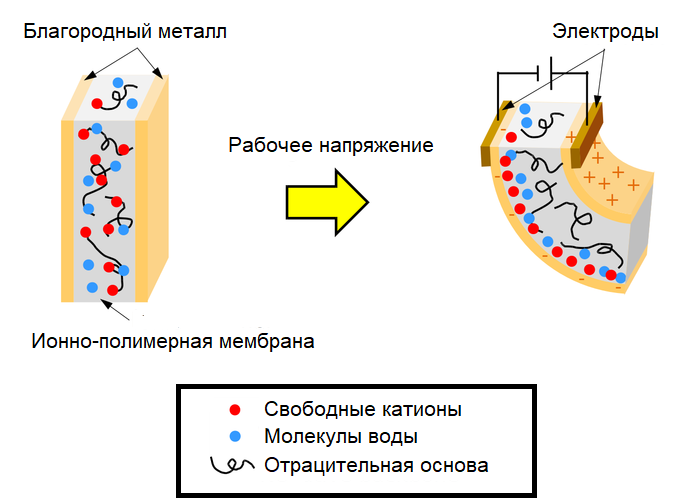
Ионные электроактивные полимеры и композиты полимер-металл включают в себя ионный полимер в форме геля и металлические электроды. Именно эти устройства исследуются на предмет возможного их использования в качестве искусственных мышц.
Когда между электродами начинает действовать напряжение, катионы приходят в движение, в результате чего в ионном гелевом полимере создается градиент давления.
Эти материалы мягки, благодаря чему им можно придать любую форму, также они могут быть использованы в водной среде. Для работы им нужно не такое уж высокое напряжение (порядка единиц вольт).
Электроактивный полимерный гель
Сегодня еще нет работающих мышц на основе электроактивного полимерного геля, однако последние исследования говорят о том, что это уже недалеко от реальности. Некоторые исследователи применяли неорганические волокна для усиления геля.
Модуль сдвига, благодаря волокнам, увеличивается. Ограничение накладывает медленный отклик в сравнении с другими электроактивными полимерами, а также то, что однородный материал такого рода получить непросто. Тем не менее, потенциал этих композитов еще не полностью раскрыт.
Проводящие полимеры
Одним из наиболее распространенных типов электроактивных полимеров из найденных сегодня, является проводящий полимер. Полимер такого рода принадлежит к соединениям, состоящим из мономерных звеньев с химическими связями, проводимость которых обеспечивается легированием.
В ходе выращивания полимера в присутствии анионов, изменение объема становится результатом градиента напряжения, создаваемого границей раздела во время протекания процессов окисления и восстановления.
Основные типы проводящих полимеров, применяемых для создания приводов:
- полипиррол,
- полианилин,
- поли (3, 4-этилендиокситиофен),
- углеродные нанотрубки.
Далее рассмотрим три достаточно хорошо изученных проводящих полимера.
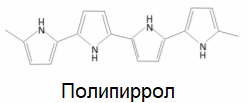
Полипиррол — наиболее изученный проводящий полимер, пригодный для применения в качестве привода. Главная причина — возможность нанесения гальванического покрытия поверх металлических электродов.
При напряжении от 1 до 3 вольт, при скорости деформации от 2 до 30% и возможностях механических напряжений до 30 МПа, он идеально подходит для использования в приводах. Кроме того, примечательна малая мощность, необходимая для поддержания значительного постоянного усилия.
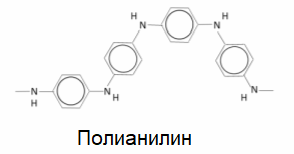
Второй по изученности — полианилин. Он интересен тем, что получается путем окислительной полимеризации в водных растворах кислот. Пленки и волокна поэтому легко изготавливать. Но из-за кислой природы его избегают. Наиболее стабильным для работы является уровень pH = 4.
Исследуется возможность использовать полианилин в микротрубках в качестве строительных блоков для полимерных приводов.
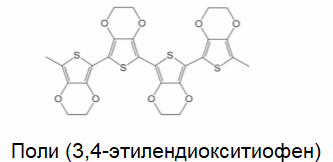
Наиболее важным считается поли (3,4 — этилендиокситиофен). Он прозрачен, стабилен, обладает высокой емкостью и проводимостью. Но ударная вязкость у него ниже, чем у двух предыдущих.
Высокая стабильность в электрохимических реакцях делает поли-3,4 — этилендиокситиофен одним из наиболее часто используемых полимеров в области приводов.
Примеры применения электроактивных полимеров в технике
Датчики на основе электроактивных полимеров (ЭАП датчики) - это устройства, которые могут преобразовывать электрические сигналы в механические деформации или наоборот.
ЭАП датчики обладают рядом преимуществ, таких как высокая чувствительность, низкое энергопотребление, легкость, гибкость и совместимость с биологическими системами.
Датчики на основе ЭАП могут использоваться в различных областях, таких как биомедицина, робототехника, микроэлектромеханические системы, сенсорная техника и другие.
Например, ЭАП датчики могут служить для измерения давления, температуры, силы, угла поворота, влажности, pH и других параметров. Некоторые примеры датчиков на основе ЭАП:
- Датчик давления на основе полипиррола, который может измерять давление в диапазоне от 0 до 300 кПа с разрешением 0,1 кПа.
- Датчик температуры на основе полианилина, который может измерять температуру в диапазоне от -40 до 120 °C с точностью 0,5 °C.
- Датчик силы на основе полиакриламида, который может измерять силу в диапазоне от 0 до 10 Н с чувствительностью 0,1 Н.
- Датчик угла поворота на основе полиэтилендиамина, который может измерять угол поворота в диапазоне от 0 до 360° с точностью 1°.
- Датчик влажности на основе поливинилхлорида, который может измерять относительную влажность в диапазоне от 0 до 100% с разрешением 0,1%.
- Датчик pH на основе полиэтиленоксида, который может измерять pH в диапазоне от 0 до 14 с точностью 0,013.
Приводы в робототехнике на основе электроактивных полимеров (ЭАП приводы) - это устройства, которые могут изменять свою форму и размер при приложении электрического напряжения, имитируя работу живых мышц. ЭАП приводы имеют ряд преимуществ перед традиционными приводами, таких как легкость, гибкость, низкое энергопотребление, высокая чувствительность и совместимость с биологическими системами.
ЭАП приводы могут использоваться в различных областях робототехники, таких как биомедицина, человекоподобные роботы, микророботы, схваты, искусственные мышцы и другие.
Например, ЭАП приводы могут служить для имитации мимики, движения глаз, рта, рук и ног человекоподобных роботов. ЭАП приводы также могут использоваться для создания сверхминиатюрных приводных систем, которые могут работать в сложных условиях, таких как высокая температура, влажность, магнитное поле и т.д.
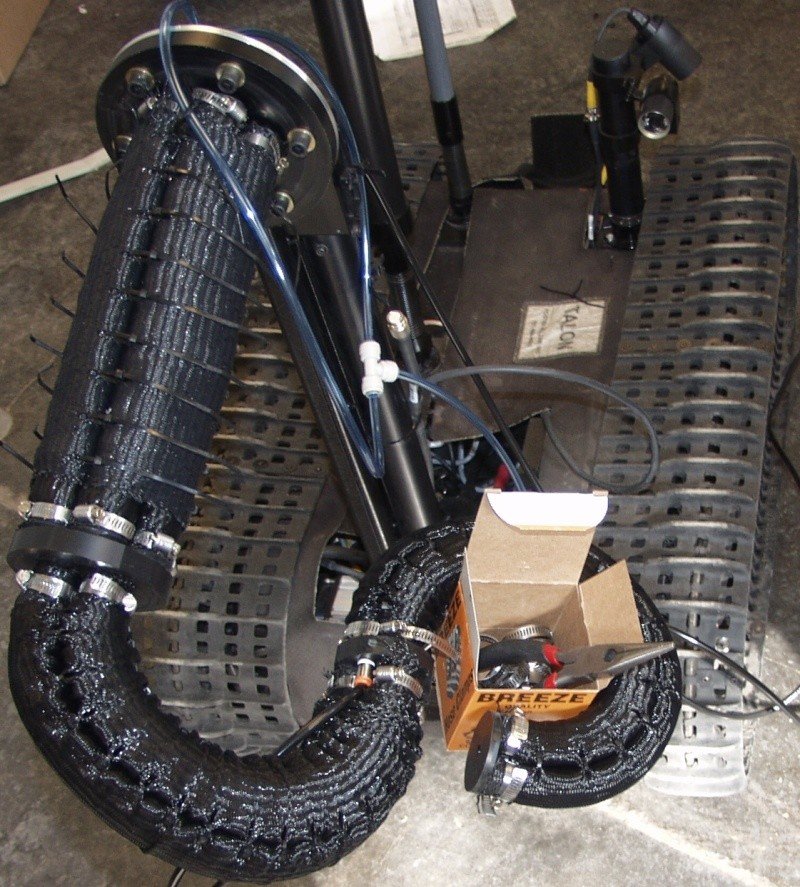
Один из примеров промышленного робота, который использует ЭАП приводы, это OctArm - гибкий манипулятор, разработанный компанией Continuum Dynamics. OctArm состоит из нескольких сегментов, которые могут сжиматься и растягиваться под действием электрического напряжения, создавая движение, похожее на движение осьминога. OctArm может выполнять различные задачи, такие как захват, перемещение, обследование и ремонт объектов в труднодоступных местах.
Андрей Повный