

Системы копирующего управления манипулятором промышленных роботов - это системы, в которых оператор перемещает задающее устройство, кинематически подобное рабочему манипулятору, а сигналы с датчиков положения и усилий на задающем устройстве передаются на приводы рабочего манипулятора.
Таким образом, оператор может дистанционно управлять движением и силой манипулятора, имитируя его действия своей рукой. Это позволяет выполнять сложные и точные операции в условиях, когда невозможно или нежелательно прямое воздействие человека на объекты (например, в опасных, труднодоступных или микроскопических средах).

Существует несколько типов систем копирующего управления манипуляторами, которые отличаются по способу отражения усилий и по направлению энергетической связи между задающим устройством и рабочим манипулятором.
В системах одностороннего действия усилия на рабочем манипуляторе не отражаются на задающем устройстве, а только передаются на него.
В системах одностороннего действия с пассивным отражением усилий на задающем устройстве имеются пассивные элементы (пружины, грузы, демпферы и т.д.), которые создают сопротивление движению оператора, имитируя усилия на рабочем манипуляторе.
В системах двустороннего действия обратимая энергетическая связь между задающим устройством и рабочим манипулятором является двунаправленной, то есть усилия на рабочем манипуляторе активно отражаются на задающем устройстве и наоборот.
Примерами применения систем копирующего управления манипуляторами являются:
- дистанционное управление манипуляторами для работы в экстремальных условиях (ядерная, химическая, космическая промышленность, подводные исследования и т.д.);
- микроманипуляторы для работы с микрообъектами (например, электроника и т.д.);
- хирургические роботы для проведения операций на расстоянии или с повышенной точностью;
- тренажеры для обучения и подготовки операторов манипуляторов и т.д.

История развития систем копирующего управления манипуляторами
Системы копирующего управления манипуляторами промышленных роботов возникли в середине XX века как способ дистанционного управления манипуляторами для работы в опасных или труднодоступных средах.
Первые примеры таких систем были разработаны для ядерной промышленности и космических исследований.
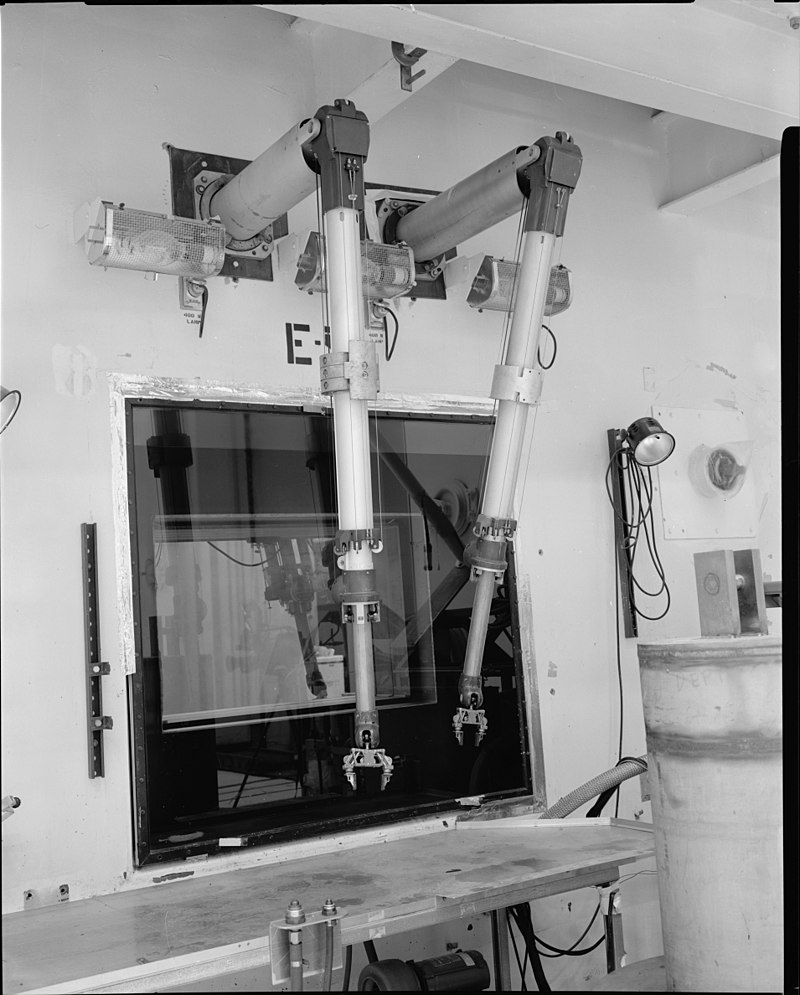
Одним из первых изобретений в этой области был манипулятор Master-Slave Manipulator (MSM), созданный в 1949 году американским ученым Рэймондом Гузи (Raymond Goertz). Этот манипулятор состоял из двух одинаковых механических рук, связанных электрическими сигналами. Одна рука (Master) находилась под контролем оператора, а другая (Slave) повторяла ее движения в изолированной камере.
В 1950-1960-е годы системы копирующего управления манипуляторами развивались в разных направлениях, таких как гидравлические, пневматические, электромеханические и оптические принципы передачи сигналов и усилий.
Также появились различные типы копирующих систем, такие как системы одностороннего и двустороннего действия, системы с пассивным и активным отражением усилий, системы с масштабированием перемещений и усилий и т.д.
Примерами таких систем являются манипуляторы WALDO (1951), MOBOT (1954) и др.
В 1970-1980-е годы системы копирующего управления манипуляторами стали более сложными и функциональными, благодаря развитию электроники, компьютерной техники и искусственного интеллекта.
Появились системы с обратной связью по видео, звуку, силе и тактильным ощущениям, а также системы с адаптацией к изменяющимся условиям окружающей среды.
Также расширились области применения систем копирующего управления манипуляторами, такие как медицина, биология, электроника, подводные исследования и т.д.
Примерами таких систем являются манипуляторы PUMA (1978), DA VINCI (1999), LOKI (2001) и др.
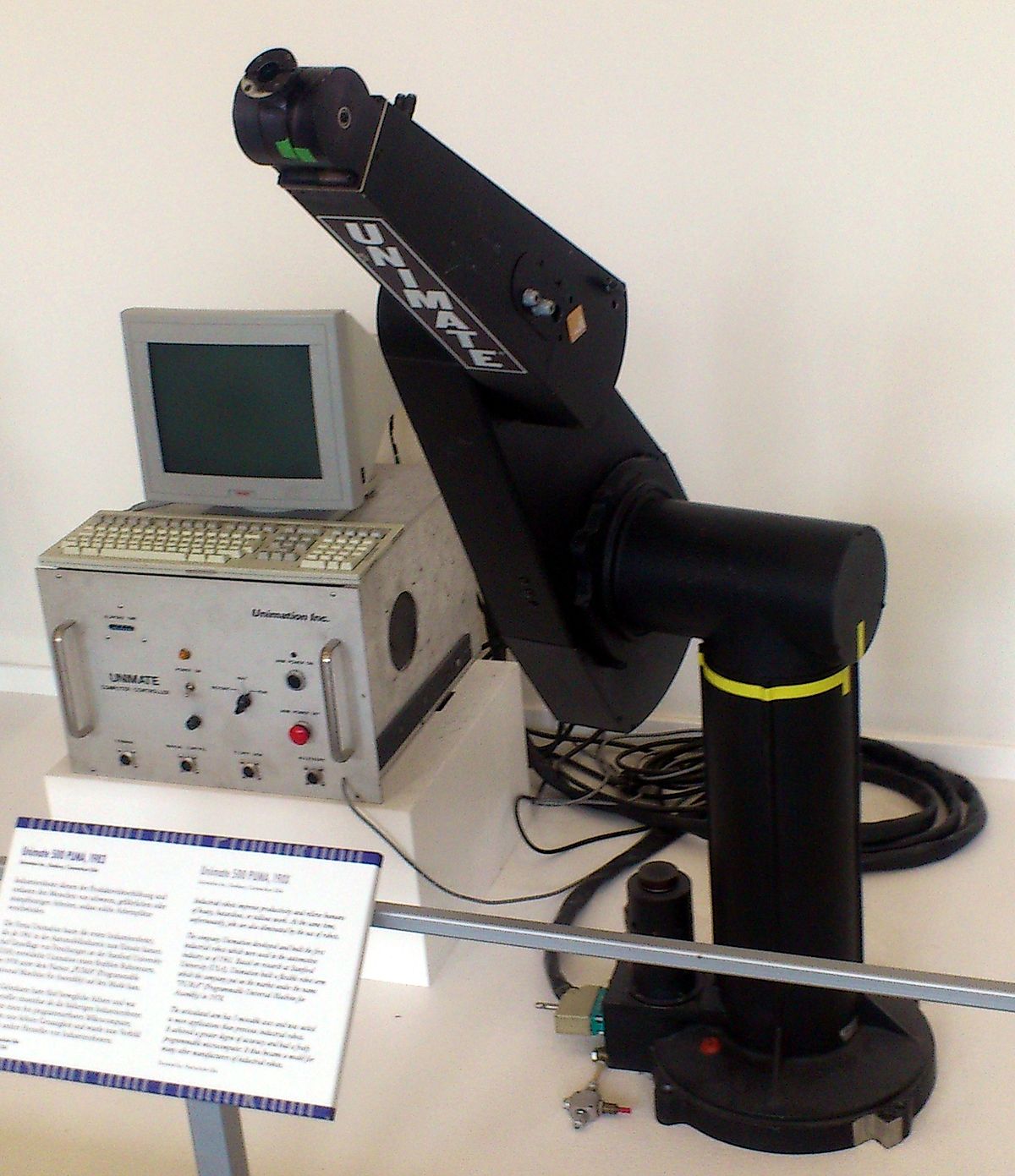
Из истории робототехники: История первого промышленного робота Unimate
В настоящее время системы копирующего управления манипуляторами продолжают развиваться и совершенствоваться, используя новые технологии, такие как виртуальная и дополненная реальность, нейронные сети, облачные вычисления и т.д.
Также появляются новые формы взаимодействия между оператором и манипулятором, такие как жесты, голос и т.д. Примерами таких систем являются манипуляторы ROBOGLOVE (2016), NEUROBOTICS (2017), HAPTIX (2018) и др.

В настоящее время системы копирующего управления манипуляторами продолжают развиваться и совершенствоваться, используя новые технологии, такие как виртуальная и дополненная реальность, нейронные сети, облачные вычисления и т.д.
Также появляются новые формы взаимодействия между оператором и манипулятором, такие как жесты, голос и т.д. Примерами таких систем являются манипуляторы ROBOGLOVE (2016), NEUROBOTICS (2017), HAPTIX (2018) и др.
Каковы основные технологии, использующиеся в системах копирующего управления манипуляторами на сегодняшний день?
Системы копирующего управления манипуляторами на сегодняшний день используют различные технологии для передачи и отражения информации о положении, скорости, усилии и тактильных ощущениях между задающим устройством и рабочим манипулятором. Среди них можно выделить следующие:
- Электронные и оптические датчики и приводы, которые обеспечивают высокую точность и скорость измерения и управления перемещениями и усилиями в копирующих системах.
- Видеокамеры, которые передают изображение рабочего пространства манипулятора на экран задающего устройства, позволяя оператору визуально контролировать выполнение операций.
- Гибкие и жесткие связи, которые обеспечивают механическую или электрическую связь между задающим устройством и рабочим манипулятором, позволяя передавать и отражать усилия в копирующих системах.
- Виртуальная и дополненная реальность, которые позволяют создавать иллюзию присутствия оператора в рабочем пространстве манипулятора, используя специальные очки, перчатки, костюмы и другие устройства.
- Нейронные сети и облачные вычисления, которые позволяют обрабатывать и анализировать большие объемы данных, получаемых от датчиков и камер, и адаптировать поведение манипулятора к изменяющимся условиям окружающей среды.
Системы управления промышленными роботами-манипуляторами могут быть реализованы с использованием различных подходов.
Один из подходов заключается в использовании классических и адаптивных систем управления для настройки роботов и повышения их производительности.
Другой подход заключается в использовании голосовых команд в естественном и переходном порядке связи между людьми и роботами, позволяющему самостоятельно управлять промышленными роботами.
Кроме того, интеграция технологии CAD-CAM и датчиков RGB-D может обеспечить адаптивное управление промышленными роботизированными манипуляторами, определение калибровку и генерацию траектории на основе фактического положения рабочего объекта.
Датчики RGB-D (красный-зеленый-синий-глубина) представляют собой устройство, способное одновременно анализировать цвет и управлять объектами. Они широко используются в различных областях, таких как компьютерное зрение, робототехника, виртуальная реальность и т. д.
Датчики RGB-D предоставляют более полную информацию об окружающей среде, чем обычные RGB-датчики, что делает их необходимыми для различных технологий и исследований.
Эти методы направлены на повышение точности, времени и стабильности манипуляторных систем, а также на облегчение их эксплуатации в условиях мелкосерийного производства.

Пример работы системы копирующего управления манипулятором промышленного робота
В примере мы будем использовать следующие данные:
- Система копирующего управления манипулятором промышленного робота состоит из задающего устройства, рабочего манипулятора, датчиков положения и усилий, приводов, контроллера и телевизионной системы.
- Задающее устройство имеет три подвижных звена, связанных шарнирными соединениями, и кинематически подобно рабочему манипулятору.
- Рабочий манипулятор имеет три подвижных звена, связанных шарнирными соединениями, и снабжен захватным устройством.
- Датчики положения и усилий установлены в каждом шарнире задающего устройства и рабочего манипулятора.
- Приводы обеспечивают вращение звеньев манипулятора по сигналам с датчиков.
- Контроллер обрабатывает сигналы с датчиков и передает их на приводы.
- Телевизионная система передает изображение рабочего пространства манипулятора на экран задающего устройства.
Пример работы системы копирующего управления манипулятором промышленного робота может быть таким:
1. Оператор включает систему и наблюдает за рабочим пространством манипулятора по телевизионной системе.
2. Оператор берет захватное устройство задающего устройства и перемещает его в нужное положение, например, к объекту, который нужно захватить.
3. Датчики положения и усилий на задающем устройстве фиксируют перемещение и силу, приложенную оператором, и передают сигналы на контроллер.
4. Контроллер обрабатывает сигналы и передает их на приводы рабочего манипулятора, учитывая масштабирование перемещений и усилий.
5. Приводы вращают звенья рабочего манипулятора так, чтобы повторить движение задающего устройства с учетом кинематического подобия.
6. Захватное устройство рабочего манипулятора приближается к объекту и захватывает его, когда оператор сжимает захватное устройство задающего устройства.
7. Оператор перемещает захватное устройство задающего устройства в другое положение, например, к месту, куда нужно переместить объект.
8. Датчики, контроллер и приводы повторяют действия, описанные в пунктах 3-5, и рабочий манипулятор перемещает объект в нужное место.
9. Оператор отпускает захватное устройство задающего устройства, и рабочий манипулятор освобождает объект.
10. Оператор выключает систему или продолжает работу с другими объектами.
Андрей Повный