

 В качестве датчиков частоты вращения в системах автоматики применяют тахогенераторы - маломощные электрические машины постоянного и переменного тока. Для преобразования частоты вращения электродвигателей в напряжение применяют тахометрические мосты.
В качестве датчиков частоты вращения в системах автоматики применяют тахогенераторы - маломощные электрические машины постоянного и переменного тока. Для преобразования частоты вращения электродвигателей в напряжение применяют тахометрические мосты.
Тахогенераторы постоянного тока
Тахогенераторы постоянного тока в зависимости от способа возбуждения выполняют двух типов: магнитоэлектрические (возбуждаемые от постоянных магнитов) и электромагнитные (возбуждаемые от специальной обмотки) (рис. 1 а, б).
Напряжение на выходе тахогенератора при постоянном потоке возбуждения Uвых = Е - IRя = Сеω - IRя
где Се = (Uя - IяRя)/ω - постоянная машины, определяется из паспортных данных.
На холостом ходу (I=0) напряжение Uвых = Е = Сеω. Следовательно, статическая характеристика тахогенератора Uвых = f (ω) при холостом ходе линейна, так как Се = const (прямая I, рис. 1, в).
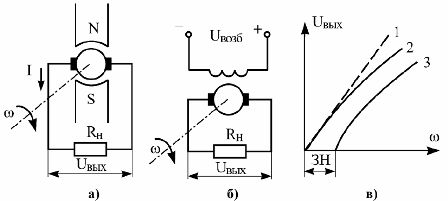
Рис. 1. Датчики частоты вращения (тахометрические генераторы постоянного тока): а) с возбуждением от постоянных магнитов, б) с электромагнитным возбуждением, в) статическая характеристика
При нагрузке статическая характеристика становится нелинейной (кривая 2). изменяется ее наклон, что является следствием реакции якоря и падения напряжения в обмотке якоря тахогенератора. В реальных тахогенераторах возникает падение напряжения на щетках, что приводит к появлению юны нечувствительности (кривая 3).
Для уменьшения искажения статических характеристик тахогенераторов используют при небольших нагрузках (Iн = 0,01 - 0,02 А). Ток в цепи якоря Iя = Е/(Rя + Rн), а выходное напряжение Uвых = Е - IRя = Сеω - IRя.
Тахогенераторы постоянного тока широко применяются в автоматических системах регулирования электроприводов в качестве датчиков частоты вращения. Их достоинства - малая инерционности высокая точность, малые габариты и масса, а для магнитоэлектрических тахогенераторов еще и отсутствие источника питания. Недостаток - наличие коллектора со щетками.

Тахогенераторы переменного тока
Синхронные тахогенераторы - однофазная синхронная машина с ротором в виде постоянного магнита (рис. 2, а), У синхронных тахогенераторов с изменением угловой скорости вместе с амплитудой изменяется и частота выходного напряжения. Статические характеристики нелинейны. В динамической отношении синхронные тахогенераторы являются безинерционными элементами.
Асинхронный тахогенератор - это двухфазная асинхронная машина с полый немагнитным ротором (рис. 2, б). На статоре асинхронного тахогенератора размещаются две сдвинутые на 90 обмотки (возбуждения ОВ и генератора ОГ). Обмотка ОВ подключается к источнику переменного тока.
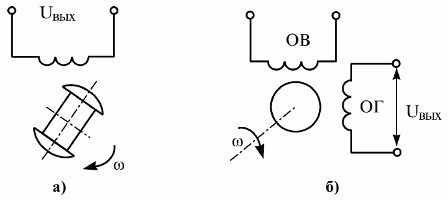
Рис. 2. Тахомерические генераторы переменного тока: а - синхронный, б - асинхронный
В обмотке OГ, являющейся выходной, при вращении ротора наводятся э.д.с. трансформации и вращения. Под действием э.д.с. вращения на выходе тахогенератора возникает напряжение Uвых.
Статическая характеристика асинхронного тахогенератора также нелинейна. При изменении вращения ротора фаза выходного напряжения изменяется на 180°.
Асинхронные тахогенераторы используют как датчики угловой скорости, частоты вращения и ускорений. В последнем случае обмотка возбуждения асинхронного тахогенератора подключается к источнику постоянного тока.
Достоинства асинхронных тахогенераторов - надежность, малая инерционность. Недостатки - наличие на выходе остаточной э.д.с. при неподвижном роторе, относительно большие габариты.

Тахометрические мосты
Тахометрические мосты постоянного и переменного тока применяют в системах автоматики для создания обратной связи но частоте вращения электрических двигателей. Это позволяет упростить систему, так как отпадает необходимость в дополнительной электрической машине - тахогенераторе. При этом уменьшаются статические и динамические нагрузки на исполнительный двигатель.
Тахометрический мост постоянного тока представляет собой специальную мостовую схему (рис. 3, а), в одно из плеч которой включен якорь двигателя Rя, а в другие - резисторы R1, R2, Rп. К диагонали аb моста подводится напряжение сети U, питающее якорь двигателя, а с диагонали cd снимается напряжение Uвыхпропорциональное угловой скорости ω.
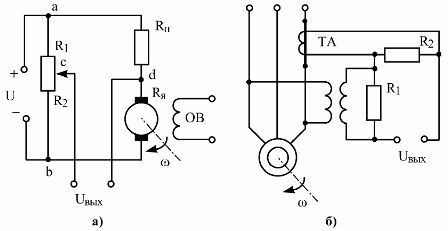
Рис. 3. Тахометрический мост постоянного тока (а) и бесконтактное измерительное устройство частоты вращения асинхронного двигателя (б)
Если ток в выходной цепи отсутствует, то

Решая совместную систему уравнений, получим

Напряжение на выходе тахометрического моста

где Kтм - коэффициент передачи тахометрического моста.
Погрешность тахометрического моста составляет ±(2 - 5)%. В динамическом отношении тахометрические мосты постоянного тока являются безинерционным звеном.
Для контроля частоты вращения ротора асинхронного электродвигателя применяют бесконтактное измерительное устройство (рис. 3, б), содержащее измерительный трансформатор тока ТА и напряжения TV.