

Любой регулируемый электропривод без обратной связи - это управление вслепую. Контроллер формирует управляющий сигнал на основе заданного значения, двигатель реагирует на него, но система никак не проверяет, совпадает ли результат с тем, что требовалось.
Мешающие воздействия - изменение нагрузки на валу, колебания напряжения питания, нагрев обмоток - вносят отклонение, которое разомкнутая система не видит и не исправляет. На практике это означает ошибку позиционирования, нестабильную скорость или перегрев без какой-либо реакции регулятора.
Замкнутая система меняет это принципиально. Датчик обратной связи непрерывно измеряет фактическое состояние привода - угол поворота, скорость, ток - и возвращает эту информацию в регулятор. Тот вычисляет рассогласование между заданным и действительным значением и формирует корректирующее воздействие.
Чем быстрее датчик передаёт данные и чем точнее он измеряет, тем жёстче и устойчивее ведёт себя привод при внешних возмущениях.
Что именно измеряется
В автоматизированном электроприводе одновременно контролируются и электрические, и механические координаты - каждая несёт свою часть информации о состоянии системы.
Ток в обмотках двигателя прямо связан с развиваемым электромагнитным моментом, поэтому его измерение позволяет регулятору управлять динамикой разгона и торможения без механического датчика момента.
Напряжение на клеммах двигателя характеризует состояние силовой цепи и используется, в частности, в алгоритмах бездатчикового управления для оценки ЭДС, а через неё - скорости ротора.
Механические координаты - скорость и перемещение - описывают то, что в итоге происходит с рабочим органом механизма. Именно они являются конечными регулируемыми величинами в большинстве приводов: станок должен переместить стол на заданное расстояние, лифт - удержать кабину на этаже, манипулятор - зафиксировать звено в точке пространства.
Для каждой из этих координат применяются специализированные датчики с разными принципами работы, точностью и способами передачи сигнала в контроллер.
|
Измеряемая координата |
Тип датчика |
Выходной сигнал |
|
Угловое положение |
Резольвер, абсолютный энкодер |
Аналог / цифровой код |
|
Угловая скорость |
Тахогенератор, инкрементальный энкодер |
Аналог / импульсы |
|
Линейное перемещение |
Линейный энкодер, потенциометр |
Аналог / цифровой |
|
Ток |
Датчик Холла, шунт, трансформатор тока |
Аналог |
|
Температура |
Термопара, PTC/NTC-термистор |
Аналог |

Резольвер
Резольвер - это абсолютный датчик углового положения, построенный по принципу вращающегося трансформатора. В отличие от энкодера, здесь нет ни фотодиодов, ни магнитных считывающих головок - только обмотки.
Первичная обмотка расположена на статоре и питается синусоидальным опорным напряжением с частотой от 400 Гц до нескольких килогерц. Две вторичные обмотки размещены на роторе и смещены относительно друг друга на 90°, поэтому при вращении ротора в них наводятся амплитудно-модулированные напряжения, несущие информацию об угловом положении вала.
Два сигнала вместе однозначно определяют угол в любой точке полного оборота - именно потому, что синус и косинус в паре не имеют неопределённости, которая возникла бы при использовании одного сигнала.
Специализированная микросхема RDC (resolver-to-digital converter) принимает оба аналоговых сигнала и вычисляет точное цифровое значение угла через внутренний следящий контур - по существу, фазовый демодулятор с ПИД-регулятором внутри.
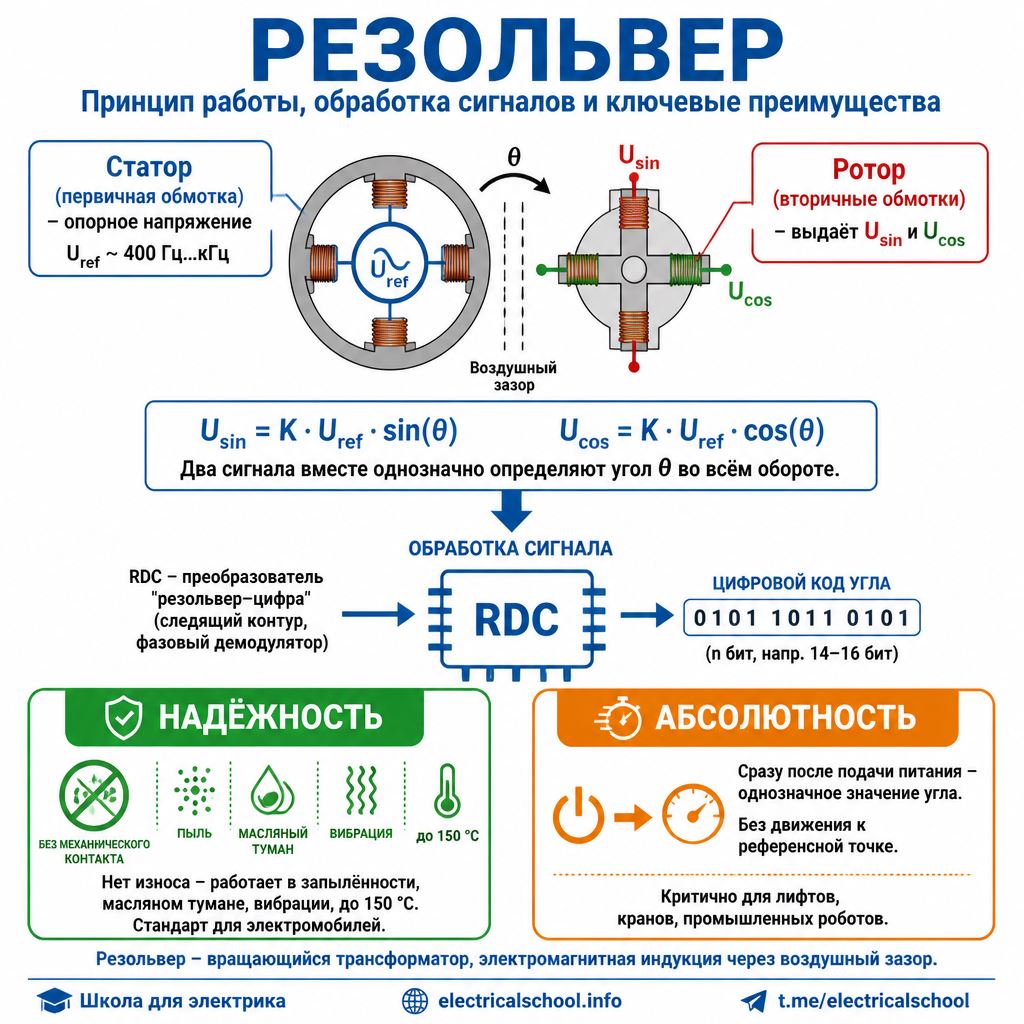
Главное достоинство резольвера вытекает из его физического устройства: между ротором и статором нет никакого механического контакта. Связь осуществляется исключительно электромагнитной индукцией через воздушный зазор, поэтому нечему изнашиваться и нечему загрязняться.
Оптический энкодер выходит из строя от пыли, попавшей на диск, или от конденсата на линзе фотоприёмника. Резольверу это безразлично - он продолжает работать при запылённости, масляном тумане, интенсивной вибрации и температурах, при которых электронные компоненты энкодера уже деградируют.
Именно поэтому резольвер стал стандартным датчиком положения в тяговых электродвигателях электромобилей, где рядом с датчиком - нагретый до 150 °C корпус мотора и постоянная вибрация от дорожного покрытия.
Второе принципиальное свойство - абсолютность показаний. Резольвер выдаёт однозначное значение угла сразу после подачи питания, без какого-либо поиска нулевой метки или движения к референсной точке.
Для подъёмных механизмов это критично: кабина лифта или стрела крана не должны совершать пробное движение при каждом включении, чтобы система управления «узнала», где находится рабочий орган.
В сервоприводах промышленных роботов абсолютность резольвера позволяет немедленно возобновить работу после аварийного останова или отключения питания - без ручного вывода осей в исходное положение.
Оптические и ёмкостные энкодеры
Оптический энкодер - наиболее распространённое решение для станков с ЧПУ и робототехники, и причина этого проста: сочетание высокого разрешения, умеренной цены и отработанной производственной базы делает его очевидным выбором для большинства задач.
Принцип работы построен на прерывании светового потока. На валу двигателя закреплён стеклянный или металлический диск с нанесёнными щелями - окнами, через которые проходит свет от инфракрасного светодиода. По другую сторону диска установлены два фотодатчика, физически смещённых так, чтобы их сигналы были сдвинуты на четверть периода решётки, то есть на 90 электрических градусов. Эти два канала обозначаются A и B.
Такая квадратурная схема даёт контроллеру сразу два параметра. Частота следования импульсов на любом из каналов пропорциональна угловой скорости вращения. Порядок, в котором нарастают фронты каналов A и B, однозначно указывает направление: если A опережает B - вращение в одну сторону, если B опережает A - в другую.
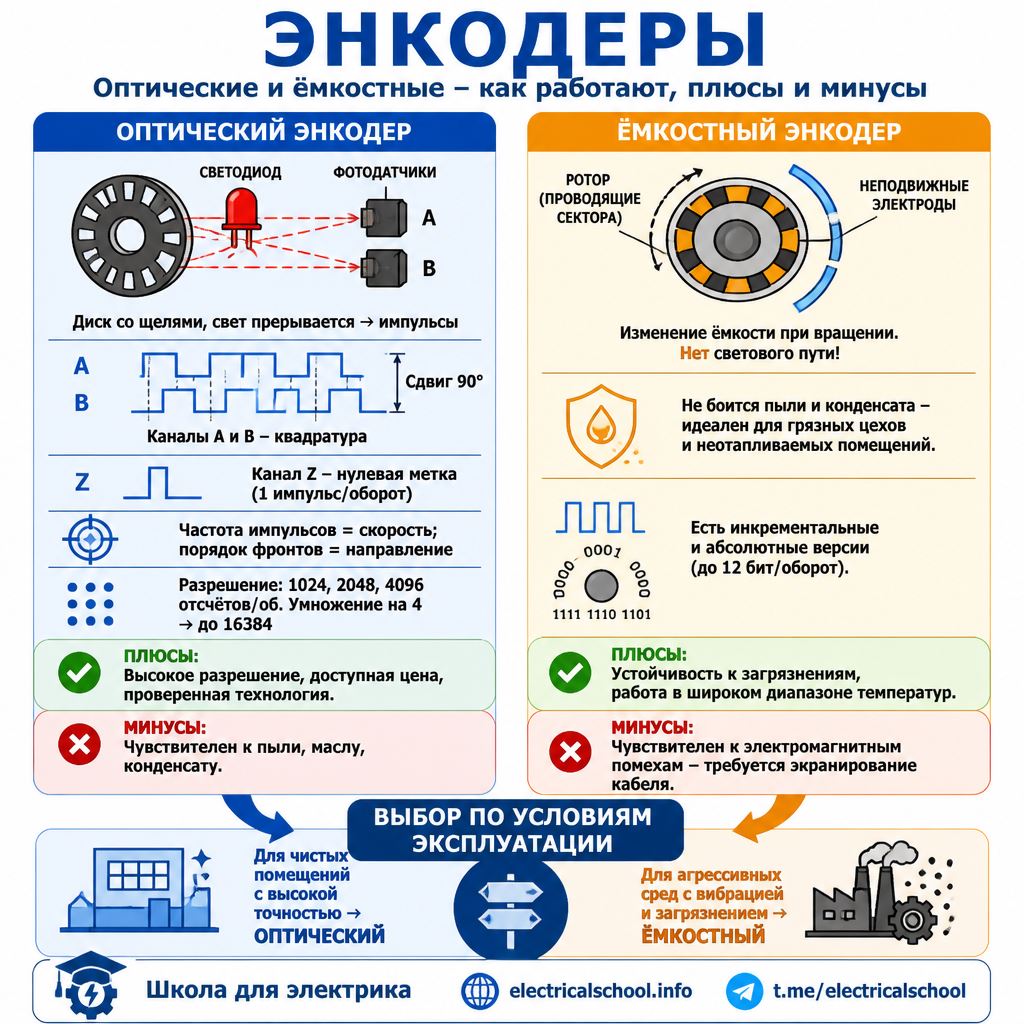
Большинство промышленных энкодеров дополнительно имеют канал Z - одиночный импульс на оборот, служащий абсолютной нулевой меткой для систем позиционирования.
Типичное разрешение составляет 1024, 2048 или 4096 отсчётов на оборот, а аппаратное умножение на 4 по обоим фронтам обоих каналов позволяет контроллеру получить до 16384 отсчётов без увеличения частоты диска.
Ёмкостные энкодеры решают главную уязвимость оптической схемы - чувствительность к загрязнению.
Серия CUI AMT10 - характерный пример: между ротором и статором нет никакого светового пути, который можно перекрыть пылью или масляным туманом. Вместо этого ротор несёт систему проводящих секторов, образующих конденсатор с неподвижными приёмными электродами статора.
При вращении геометрия перекрытия электродов меняется, что приводит к периодическому изменению ёмкости. Схема обработки сигнала регистрирует эти изменения и преобразует их в угловое положение или импульсный выходной сигнал.
По функциональности ёмкостные энкодеры полностью перекрывают нишу оптических: они выпускаются как в инкрементальном, так и в абсолютном исполнении с разрешением до 12 бит на оборот.
Отсутствие оптических элементов делает их нечувствительными не только к пыли, но и к конденсату - проблеме, которая регулярно выводит из строя оптические датчики в неотапливаемых цехах при резкой смене температуры.
Практическое ограничение ёмкостного принципа - более высокая чувствительность к электромагнитным помехам по сравнению с оптикой, поэтому в непосредственной близости от мощных силовых шин такие датчики требуют тщательного экранирования сигнального кабеля.
Инкрементальные против абсолютных
Деление энкодеров на инкрементальные и абсолютные отражает принципиально разные подходы к хранению информации о положении:
- Инкрементальный энкодер генерирует импульсы при изменении положения вала. Само по себе это устройство не «знает», где находится ротор - только то, насколько он повернулся с момента последнего отсчёта. После каждого включения питания или сброса система обязана выполнить движение к референсной точке. Преимущество - высокая скорость реакции и простота интерфейса, поэтому инкрементальные энкодеры широко применяются там, где приоритет именно скорость, а не удержание заданной позиции после обесточивания.
- Абсолютный энкодер каждому угловому положению вала ставит в соответствие уникальный цифровой код - однооборотный в пределах одного оборота, многооборотный с аппаратным счётчиком полных оборотов. Данные не теряются при отключении питания. Для энергонезависимого подсчёта оборотов применяются либо системы оптических редукторов, либо магнитные датчики на эффекте Вигана, которые генерируют импульс без внешнего питания при каждом прохождении магнита.
Датчики Холла и тахогенераторы
Датчики Холла в электроприводе выполняют принципиально разные функции в зависимости от того, где и как они установлены.
Физическая основа эффекта Холла - отклонение носителей заряда в проводнике поперечным магнитным полем, что создаёт разность потенциалов на гранях пластины, перпендикулярных направлению тока. Эта разность потенциалов пропорциональна индукции поля, что делает датчик Холла естественным преобразователем магнитного поля в электрический сигнал - без движущихся частей, без контакта с измеряемым объектом.
В бесколлекторных двигателях (BLDC) три датчика устанавливаются на статоре со смещением 120° относительно друг друга и реагируют на магнитное поле постоянных магнитов ротора. По мере вращения ротора каждый датчик последовательно оказывается напротив северного или южного полюса, выдавая логическую единицу или ноль.
Комбинация трёх двоичных сигналов даёт шесть различимых секторов на оборот, то есть угловое разрешение порядка 60 электрических градусов.
Для трапецеидальной коммутации - попеременного включения пар фазных обмоток - этой информации достаточно: контроллер точно знает, какую пару фаз подключить в данный момент, чтобы момент был максимальным.
Шестисекторное разрешение - это предел возможностей дискретных датчиков Холла при трапецеидальной коммутации. Синусоидальное векторное управление требует значительно более точного знания угла ротора в реальном времени, и здесь дискретные датчики уступают место интегральным магнитным энкодерам.
Устройства типа Melexis MLX90367 размещают над торцом вала с закреплённым двухполюсным магнитом трёхосевой датчик Холла, встроенный вместе с АЦП, DSP и схемой коррекции температурного дрейфа в единый корпус.
Процессор внутри микросхемы вычисляет угол по соотношению трёх проекций поля методом CORDIC и выдаёт 12-битный код абсолютного положения через интерфейс SPI, I2C или автомобильный протокол SENT - всё это без каких-либо внешних компонентов.
Магнитный принцип делает такие датчики нечувствительными к пыли, влаге и вибрации, что объясняет их широкое распространение в автомобильных и промышленных приводах.
Тахогенератор решает задачу измерения скорости принципиально иным способом - не считая импульсы, а непосредственно генерируя напряжение. Ротор с постоянными магнитами вращается внутри статорной обмотки, индуцируя в ней ЭДС по закону Фарадея.
Поскольку ЭДС пропорциональна скорости изменения магнитного потока, а тот меняется с частотой вращения ротора, выходное напряжение постоянного тока оказывается линейно связано со скоростью во всём рабочем диапазоне. Никакой обработки сигнала, никаких счётчиков и таймеров - аналоговый вольтметр на выходе тахогенератора прямо показывает скорость вращения.
Именно эта простота удерживает тахогенераторы в нише приводов постоянного тока даже на фоне повсеместного распространения цифровых систем.

Аналоговый сигнал напрямую подаётся на вход аналогового регулятора скорости без какого-либо преобразования - схема из операционных усилителей замыкает контур со временем реакции, недостижимым для цифровых систем с ограниченной частотой дискретизации.
В новых цифровых приводах тахогенераторы вытесняются инкрементальными энкодерами, скорость по которым вычисляется программно - через измерение периода между импульсами или счёт импульсов за фиксированный интервал времени. Однако там, где уже установлено аналоговое оборудование и нет задачи позиционирования, менять тахогенератор на энкодер нет практического смысла.
Место установки датчика в кинематической цепи
От того, где физически закреплён датчик, прямо зависит точность всей системы управления. Существуют три принципиально разных варианта:
- Установка непосредственно на валу двигателя - самая простая и дешёвая схема. Контроллер «видит» положение ротора, но редуктор, ходовой винт и вся остальная механика остаются вне контура управления. Люфты и погрешности передачи система не компенсирует.
- Установка после редуктора, например на ходовом винте станка, уже включает погрешности редуктора в обратную связь. Это существенно повышает точность позиционирования, однако тепловые деформации самого рабочего органа по-прежнему не учитываются.
- Установка линейного энкодера или измерительной рейки непосредственно на рабочем столе - наиболее точный вариант для прецизионных станков с ЧПУ. Сигнал поступает через измерительный мультипликатор и учитывает все погрешности механики: люфты, деформации, тепловое расширение.
Интерфейсы и протоколы передачи данных
Выбор выходного каскада энкодера определяется длиной кабеля и типом контроллера:
|
Тип интерфейса |
Напряжение |
Особенности |
Применение |
|
TTL (RS-422) |
5 В |
Дифференциальный высокочастотный сигнал |
Короткие кабели сервоприводов |
|
HTL (Push-Pull) |
24 В |
Высокая устойчивость к промышленным наводкам |
Прямое подключение к модулям ПЛК |
|
Sin/Cos |
5 В |
Аналоговый сигнал для аппаратной интерполяции |
Высокоточные станки с ЧПУ |
|
SSI / BiSS-C / EnDat 2.2 |
5 В |
Цифровой, с диагностикой по одному кабелю |
Абсолютные энкодеры в сервосистемах |
Схема с выходом HTL (Push-Pull 24 В) наиболее популярна для подключения к дискретным быстрым входам ПЛК - она допускает кабели до 100 метров без повторителей.
Дифференциальная схема RS-422 применяется в сервоприводах: контроллер считывает разницу потенциалов между прямым и инверсным проводом, аппаратно отсекая синфазные помехи от силовых кабелей.
Для аналоговых датчиков давления и температуры в насосных приводах стандартом де-факто остаётся двухпроводная токовая петля 4-20 мА - сигнал передаётся последовательно с питанием, а сопротивление нагрузки аналогового входа ПЛК должно составлять не менее 250 Ом, особенно если поверх тока наложен цифровой протокол HART.
Монтаж
Энкодеры крайне чувствительны к электромагнитным помехам, и источник этих помех находится в непосредственной близости - силовые транзисторы преобразователя частоты переключаются с крутизной фронтов в десятки вольт на наносекунду, создавая широкополосное излучение, которое индуктивно и ёмкостно наводится на слаботочные сигнальные линии энкодера.
Импульсный сигнал с амплитудой 5 В и помеха с амплитудой в единицы вольт - это уже потеря счёта импульсов и ложные срабатывания входа контроллера.
Результат на практике выглядит как необъяснимые скачки позиции, самопроизвольное движение привода или аварийный останов по ошибке энкодера.
Защита строится на двух принципах одновременно - экранировании и витой паре. Экран кабеля перехватывает электрическое поле, витая пара подавляет магнитную индукцию за счёт взаимной компенсации наводок в соседних витках.
Однако экран работает только при правильном заземлении: соединение должно иметь большую площадь контакта с корпусом привода по всему периметру - через кабельный зажим или металлический сальник.
Скрученная «косичка» из проволок экрана, подключённая к клемме заземления, имеет паразитную индуктивность в десятки нанофенри, и на высоких частотах это соединение перестаёт быть низкоомным - экран фактически не работает. Второй конец экрана при этом оставляют незаземлённым, чтобы исключить протекание уравнительных токов через экран при разности потенциалов между корпусами привода и контроллера.
Механическая часть монтажа энкодера не менее критична, чем электрическая. Подшипники энкодера спроектированы для восприятия исключительно осевых нагрузок от собственного вала - радиальная нагрузка в несколько ньютон для них уже является разрушающей при длительной работе.
Между тем идеально соосно установить энкодер на вал двигателя в производственных условиях практически невозможно: допуски на изготовление посадочных мест, тепловое расширение корпуса при нагреве, прогиб вала под нагрузкой - всё это создаёт постоянно меняющуюся несоосность, которую жёсткая муфта передаёт напрямую в подшипник датчика.
Сильфонная муфта решает эту проблему конструктивно. Гофрированный металлический сильфон компенсирует одновременно радиальное смещение осей, угловое рассогласование и осевое смещение, сохраняя при этом высокую крутильную жёсткость - момент передаётся без люфта и упругого скручивания, которое внесло бы погрешность в показания датчика.
Установка без такой муфты - даже при визуально точном совмещении валов - приводит к разрушению подшипника энкодера в течение нескольких часов работы при вибрации или температурном расширении корпуса.
Дополнительное требование: корпус энкодера должен быть зафиксирован от проворота через отдельный поводок или кронштейн с достаточной степенью свободы, иначе реактивный момент при изменении скорости передаётся на корпус датчика и создаёт те же радиальные нагрузки на подшипник.
Бездатчиковое управление
Развитие вычислительной техники позволило реализовать контур обратной связи без физического датчика - не как упрощение системы, а как полноценную альтернативу с собственной областью применения.
Идея бездатчикового управления опирается на то, что электродвигатель сам по себе является источником информации о своём состоянии: фазные токи и напряжения, измеряемые непосредственно в силовой цепи преобразователя, несут в себе информацию об угловом положении и скорости ротора.
Задача сводится к тому, чтобы извлечь эту информацию математически - построить наблюдатель состояния, который по измеренным электрическим величинам восстанавливает механические координаты в реальном времени.
В алгоритмах бездатчикового векторного управления процессор привода решает эту задачу непрерывно. На каждом такте управления - обычно с частотой 8-16 кГц - измеряются мгновенные значения фазных токов и напряжений, после чего математическая модель двигателя пересчитывает их в оценку потокосцепления ротора, а из него - в угол и скорость.
Наиболее распространённые алгоритмы такого рода - наблюдатель Люенбергера и расширенный фильтр Калмана - отличаются по вычислительной сложности и устойчивости при изменении параметров двигателя, однако оба требуют точного знания электрических параметров машины: активного сопротивления обмоток, индуктивностей по осям d и q.
Эти параметры определяются при первичной идентификации двигателя и хранятся в памяти контроллера, однако их изменение при нагреве обмоток вносит постепенную погрешность в оценку положения.
Принципиальное ограничение бездатчикового метода связано с физикой самого двигателя. ЭДС, индуцируемая вращающимся ротором в обмотках статора, пропорциональна скорости вращения - и при малых скоростях она становится соизмеримой с падением напряжения на активном сопротивлении обмоток и с уровнем шума измерительных цепей.
Наблюдатель теряет наблюдаемость: сигнал тонет в помехах, оценка угла расходится с реальным положением ротора, и система управления начинает вырабатывать некорректные управляющие воздействия. На нулевой скорости ЭДС равна нулю, и классический наблюдатель на основе модели ЭДС полностью слепнет.
Для частичного решения этой проблемы разработаны методы инжекции высокочастотного сигнала - в обмотки подаётся зондирующее напряжение, и по реакции тока на него определяется угловое положение через анизотропию индуктивности ротора. Это расширяет рабочий диапазон до нулевой скорости, однако ценой дополнительных потерь и акустического шума.
Тем не менее в механизмах с жёстким требованием удержания позиции при нулевой скорости - шпиндели прецизионных станков, суставы промышленных роботов, подъёмные устройства - физический датчик остаётся единственным надёжным решением: никакая математическая модель не заменяет прямого измерения координаты там, где цена ошибки - авария или брак детали.
FAQ
Чем абсолютный энкодер отличается от инкрементального на практике?
После отключения питания инкрементальный энкодер «забывает» позицию - при следующем включении станок должен ехать в нулевую точку. Абсолютный этого не требует: каждому углу соответствует уникальный код, который сохраняется независимо от питания.
Почему резольвер используют в автомобильных электромоторах, а не обычный энкодер?
Резольвер не содержит электронных компонентов в зоне ротора - только обмотки. Это даёт работоспособность при температурах свыше 150 °C и в условиях постоянной вибрации, характерных для тягового электропривода автомобиля.
Зачем нужна токовая петля 4-20 мА, если можно передать напряжение 0-10 В?
Ток, в отличие от напряжения, не зависит от сопротивления кабеля. На длинных линиях падение напряжения в проводах внесло бы погрешность в измерение, тогда как ток по всей длине петли одинаков.
Почему экран кабеля энкодера нельзя заземлять с двух сторон?
Если заземлить экран с обоих концов, через него потечёт уравнительный ток из-за разницы потенциалов земель преобразователя и ПЛК. Этот ток наводит помехи в сигнальных проводах сильнее, чем незаземлённый экран. Подключение со стороны привода единственной точкой устраняет проблему.
Андрей Повный