

 Цикличность производственных процессов многих механизмов привела к появлению особого класса аппаратов управления, которые обеспечивают выполнение программы работы исполнительных устройств в заданной последовательности. Такие устройства называют командоаппаратами, или командоконтроллерами.
Цикличность производственных процессов многих механизмов привела к появлению особого класса аппаратов управления, которые обеспечивают выполнение программы работы исполнительных устройств в заданной последовательности. Такие устройства называют командоаппаратами, или командоконтроллерами.
Командоаппарат представляет собой механическое устройство, периодически воздействующее на электрические чувствительные элементы, которые вырабатывают управляющие сигналы. Основной деталью такого устройства является вал или барабан, который получает движение от механизма станка или электродвигателя. В первом случае осуществляется управление в функции перемещения органов станка, а во втором — в функции времени.
Примером может служить регулируемый кулачковый командоаппарат серии КА21, принципиальная схема которого показана на рис. 1. В качестве коммутационных элементов в командоаппарате используют микровыключатели 5, закрепленные на изоляционной стойке 2 двумя винтами: 3 и 6. Винт 3 является регулировочным с его помощью можно изменять положение микровыключателя относительно толкателя с роликом 4.
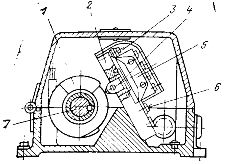
Рис. 1. Регулируемый командоаппарат серии КА21.
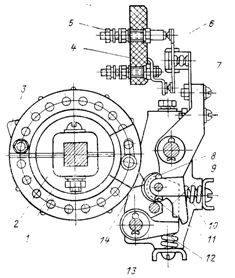
Рис. 2. Кулачковый командоаппарат серии КА4000.
Распределительным элементом командоаппарата служит вал 7 с кулачками 1, представляющими собой диски с двумя подвижными секторами. Меняя взаимное положение секторов и поворачивая кулачок относительно вала, можно изменять длительность включенного положения микровыключателя и момент срабатывания.
Командоаппарат размещают в герметизированном корпусе и в некоторых случаях снабжают редуктором, изменяющим длительность цикла управления. На валу командоаппарата устанавливают от 3 до 12 кулачков и соответствующее количество микровыключателей.
Командоаппараты серии КЛ21 рассчитаны на коммутацию цепей переменного тока 380 В, 4 А и постоянного тока 220 В, 2,5 А. Коммутационная износостойкость составляет 1,6 млн. циклов, механическая износостойкость достигает 10 млн. циклов.
Для программной коммутации цепей большой мощности используют командоаппараты серии КА4000 с моментным отключением контактов, конструкция которого показана на рис. 2. Вал 1 командоаппарата имеет квадратное сечение, что позволяет закреплять управляющие шайбы 2, состоящие из двух половин. Шайбы снабжены отверстиями для закрепления кулачков 3 и 14, которые устанавливаются по обе стороны шайбы. Корпус кулачка имеет удлиненный паз, что позволяет сдвигать его относительно крепежного отверстия. Вал с шайбами и кулачками образует распределительный барабан, определяющий программу работы командоаппарата.
Контактная система командоаппарата мостикового типа состоит из неподвижных контактов 5, установленных на изоляционной рейке 4, и подвижной контакт-детали 6, соединенной с рычагом 7. При вращении барабана включающий кулачок 14 набегает на контактный ролик 11 и поворачивает рычаг 7, замыкая контактную систему и сжимая возвратную пружину 10. Одновременно с этим защелка 13 отключающего рычага 9 под действием пружины 12 заходит за выступ рычага 7, фиксируя контактную систему в замкнутом положении, после того как кулачок 14 повернется и прекратит контактировать с роликом 11.
Отключение контактной системы осуществляется вторым кулачком 3, который набегает на ролик 8, поворачивает отключающий рычаг 9 и освобождает рычаг 7, который под действием возвратной пружины 10 мгновенно размыкает контакты командоаппарата. Эта позволяет коммутировать силовые токовые цепи при медленном вращении барабана.
При более сложных циклах работы на одной шайбе можно устанавливать до трех включающих и трех отключающих кулачков. Командоаппараты этой серии имеют встроенный цилиндрический или червячный редуктор с передаточным числом от 1:1 до 1:36; иногда их снабжают электроприводом. Число коммутируемых цепей от 2 до 6. При большем числе цепей в командоаппарате устанавливают два барабана. Максимальная частота вращения барабана до 60 об/мин. Электрическая износостойкость командоаппарата 0,2 млн, циклов, механическая износостойкость 0,25 млн. циклов.
В качестве командоаппарата часто используют шаговый искатель, устройство которого показано на рис. 3. Контактная система шагового искателя представляет собой набор неподвижных контактов (ламелей) 1, расположенных по окружности. По ламелям скользит подвижная щетка 2, которая закреплена на оси 3. Щетка подключается к внешней цепи с помощью подвижного токоподвода 10. Шаговое перемещение щетки осуществляется храповым механизмом, состоящим из храпового колеса 5, рабочей собачки 6 и фиксирующей собачки 9. Храповой механизм имеет электромагнитный привод 7. При подаче управляющего импульса в обмотку электромагнита якорь притягивается к сердечнику и поворачивает храповое колесо на один зуб. В результате щетка переходит с одной ламели на другую и производит переключение во внешней цепи.
Шаговый искатель имеет несколько рядов ламелей и щеток, укрепленных на одной оси. Это позволяет увеличить число коммутируемых цепей.
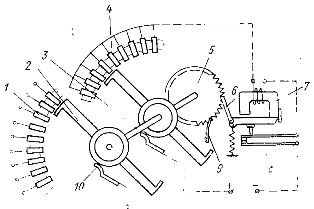
Рис. 3. Устройство шагового искателя.
Подвижные элементы шагового искателя могут перемещаться только в одном направлении. Поэтому возврат щетки в начальное положение возможен только после того, как она сделает полный оборот. Если число тактов в цикле работы командоаппарата меньше числа ламелей, то возможно ускоренное перемещение щетки в начальное положение. Для этого используют специальный ряд ламелей 4, в котором все ламели, кроме нулевой, электрически соединены между собой. Цепь возврата показана на рис. 3 штриховой линией. Она образуется ламелямп 4, катушкой электромагнита и его вспомогательными размыкающими контактами 8.
При каждом срабатывании электромагнита контакты 8 размыкаются и цепь возврата рвется. Контакты 8 опять замыкаются, и т. д. В результате собачка 6 получает импульсное движение с частотой, определяемой собственной частотой электромеханической системы, и щетка быстро перемещается по ламелям 4. Когда щетка дойдет до нулевой ламели, цепь возврата размыкается и движение щетки прекращается. Контакты шаговых искателей рассчитаны на небольшие токи (до 0,2 А). Для коммутации силовых цепей применяют шаговые искатели с тиристорными ключами.
Бесконтактные командоаппараты сконструированы на том же принципе, что и контактные. Командоаппарат имеет центральный вал с дисками, на которых укреплены управляющие элементы (кулачки, экраны, оптические заслонки и т. п.). По периферии дисков на неподвижном корпусе устанавливают чувствительные элементы командоаппарата. В качестве последних используют индуктивные, фотоэлектрические, емкостные и другие преобразователи. Так, например, на базе контактного командоаппарата КА21 (см. рис. 1) выпускается бесконтактный командоаппарат типа КА51.
Бесконтактная коммутация осуществляется генераторными путевыми выключателями, сходными по конструкции с выключателями типа БВК, которые устанавливают вместо микропереключателей 5. Управление этими выключателями производится алюминиевыми секторами, закрепленными на валу 7 вместо кулачков 1.
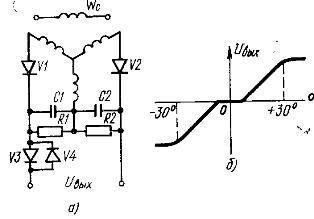
Рис. 4. Схема бесконтактного командоаппарата на базе сельсина
На рис. 4, а приведена схема бесконтактного командоаппарата, выполненного на базе сельсина. Обмотку статора сельсина Wc включают в сеть. Напряжение, возникающее на обмотках ротора, выпрямляется диодами V1 и V2, сглаживается конденсаторами С1 и С2 и через резисторы R1 и R2 подается на нагрузку. Поворот ротора сельсина изменяет ЭДС в его обмотках, что приводит к изменению выпрямленного напряжения. При повороте ротора в противоположном направлении выпрямленное напряжение меняет знак.
Такие командоаппараты применяют в системах автоматизированного электропривода, где необходимо подать три команды: пуск в прямом и обратном направлении и остановка. Для более четкой фиксации электропривода при остановке создают зону нечувствительности командоаппарата. Для этого используют нелинейность вольт-амперной характеристики диодов V3 и V4, которая возникает при малых токах. График изменения выходного напряжения командоаппарата в функции угла поворота ротора а приведен на рис. 4, б.