

В объектах регулирования, не обладающих самовыравниванием, любое возмущающее воздействие не может быть локализовано без помощи автоматического регулятора, и состояние равновесия не будет достигнуто.
Работа автоматического регулятора определяется видом зависимости между отклонениями регулируемого параметра и регулирующим воздействием регулирующего органа, происходящим в результате его перемещения. Эта зависимость называется динамической характеристикой регулятора или законом регулирования регулятора. По виду этой зависимости регуляторы делятся на позиционные, статические или пропорциональные, астатические и изодромные.

Регулирующий орган в позиционном регуляторе может иметь два или несколько фиксированных положений, каждое из которых соответствует определенным значениям регулируемого параметра.
По количеству позиций регуляторы могут быть двухпозиционные, трехпозиционные и многопозиционные.
В практике наибольшее применение находят двухпозиционные регуляторы. О них и следует говорить более подробно.
В двухпозиционном регуляторе при отклонении регулируемого параметра от заданного значения (на величину большую, чем нечувствительность регулятора) регулирующий орган занимает одно из крайних положений, соответствующих максимальному или минимальному возможному притоку регулирующего вещества. В частном случае минимальное значение может быть и нулем притока.
Передвижение регулирующего органа из одного крайнего положения в другое при двухпозиционном регулировании обычно совершается с большой скоростью - теоретически мгновенно за момент времени, равный нулю.
Равенство между притоком и стоком при заданном значении регулируемого параметра не наблюдается. Оно может наступить только лишь при максимальной или минимальной нагрузках. Поэтому при двухпозиционном регулировании система находится, как правило, в неравновесном состоянии. В силу этого регулируемый параметр непрерывно колеблется в обе стороны от заданного значения.
Амплитуда этих колебаний при отсутствии запаздываний, как нетрудно предположить, будет определяться нечувствительностью регулятора. Зона возможных колебаний регулируемого параметра зависит от зоны нечувствительности регулятора и ею определяется, если предположить, что запаздывания отсутствуют.
Зоной нечувствительности регулятора называется диапазон изменения регулируемого параметра, требуемый для начала трогания регулирующего органа в прямом и обратном, направлениях. Так, например, если регулятор температуры воздуха в помещении, настроенный на поддержание 20° С, начинает закрывать регулирующий орган на подводе горячей воды к нагревательному прибору при повышении температуры внутреннего воздуха до 21°, а открывать его при температуре 19°, то зона нечувствительности данного регулятора равна 2°.
Точность поддержания заданных параметров при двухпозиционном регулировании сравнительно высокая.
Если же точность регулирования достаточно высокая, то, казалось бы, двухпозиционные регуляторы можно применять на всех объектах. Однако применимость двухпозиционного регулирования в большинстве случаев определяется не достигаемой точностью регулирования, а допустимой частотой переключений. Нужно иметь в виду, что частые переключения приводят к быстрому износу деталей (очень часто контактов) регулятора, а следовательно, к уменьшению надежности его работы.
Наличие запаздывания ухудшает процесс регулирования, так как увеличивает амплитуду колебаний параметра, но с другой стороны, запаздывание уменьшает частоту переключений и этим как бы расширяет область применения двухпозиционного регулирования.
Принципиальная схема электрического двухпозиционного регулятора температуры в сушильном шкафу изображена на рис. 1.
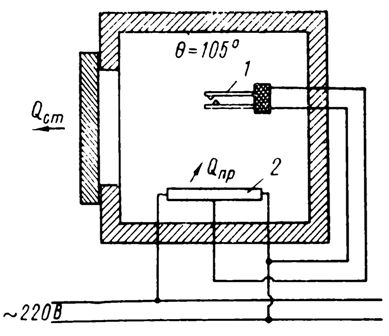
Рис. 1. Принципиальная схема электрического двухпозиционного регулятора температуры в сушильном шкафу: 1 - биметаллический датчик; 2 - нагревательный электрический элемент
Этот регулятор состоит из датчика 1 и нагревательного электрического элемента 2. Датчик состоит из двух биметаллических пластин с контактами, которые под действием температуры могут, приближаясь друг к другу, замыкать или, наоборот, размыкать электрическую цепь.
Обычно в сушильном шкафу поддерживается температура 105° С. Тогда при достижении указанной температуры контакты должны замкнуться и часть нагревательного элемента шунтируется. Необходимая величина Qпp после шунтирования нагревателя может быть подобрана с таким расчетом, чтобы полностью компенсировать потери тепла сушильным шкафом Qcт.
Но можно регулировать и таким образом, чтобы при достижении заданной температуры полностью выключать нагреватель. В первом варианте можно добиться того, что Qпp = Qcт, тогда регулятор не будет переключаться.
На рис. 2 изображена характеристика процесса двухпозиционного регулирования. На этом рисунке показаны изменения регулируемого параметра во времени после однократного скачкообразного изменения нагрузки на объект Qпp или Qст. Здесь же показаны перемещения регулирующего органа во времени.
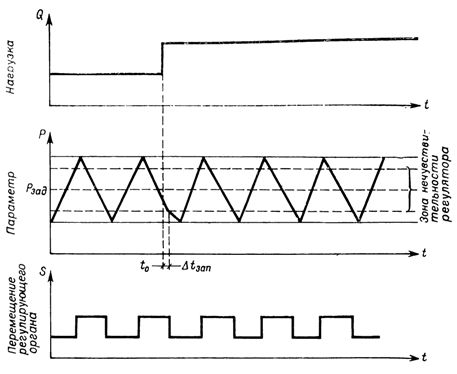
Рис. 2. Характеристика процесса двухпозиционного регулирования
Надо заметить, что при двухпозиционном регулировании изменение нагрузки вызывает смещение среднего значения регулируемой величины, т. е. оно характеризуется некоторой неравномерностью. Отклонение от среднего значения регулируемого параметра может быть подсчитано по формуле
dPсм = (dtзап/W)(Qпp/2 - Qcт),
где dPсм - максимальное смещение регулируемого параметра от среднего заданного значения; dtзап - время передаточного запаздывания; W - коэффициент емкости объекта.
В обычных случаях Qпp = Qcт и dtзап - величина незначительная. Поэтому смещение не может быть весьма существенным и не выходит за границу зоны нечувствительности регулятора.
Области применения двухпозиционных регуляторов
Двухпозиционный регулятор можно применять в том случае, когда степень самовыравнивания объекта регулирования близка к единице и чувствительность объекта к возмущениям не превышает 0,0005 1/с, если нет других причин, заставляющих отказаться от этого регулятора. К таким причинам следует отнести:
1. Частые, меньше чем через 4 - 5 мин, включения и выключения регулятора, которые обычно имеют место в объектах с небольшими коэффициентами емкости и при частых изменениях нагрузок на объект.
Нужно иметь в виду, что допустимая частота переключений определяется техническим совершенством регуляторов на данном уровне. Эти цифры устанавливаются из практики работы системы автоматического регулирвания. В дальнейшем, возможно, они могут быть уточнены, главным образом в меньшую сторону. Далее нужно иметь в виду, что можно допустимую частоту переключений определить, если установить необходимый срок службы регулятора, зная при этом минимальное нормируемое число срабатываний (циклов) одного из элементов регулятора.
2. Недопустимость прекращения подачи теплоносителя, например, в калориферы приточной вентиляционной установки или в калориферы первого подогрева установки кондиционирования воздуха. Нужно иметь в виду, что если в зимнее время года полностью или даже частично перекрыть подачу теплоносителя в калориферы, то при работающем вентиляторе, который просасывает холодный воздух с большой скоростью, он весьма быстро может замерзнуть.
3. Недопустимость большого отклонения нерегулируемых параметров среды. Здесь имеется в виду, что в целом ряде случаев регулируется один из параметров воздуха, а другой не регулируется, но должен быть в определенных пределах.
К примеру, можно назвать поддержание определенной температуры в цехах текстильного производства. Здесь ставится задача регулирования такой температуры, при которой будут выдержаны условия по поддержанию относительной влажности в определенных пределах. Однако, если температура выдерживается в заданных пределах, то колебания относительной влажности выходят из зоны допустимых.
Последнее обстоятельство можно объяснить тем, что коэффициенты емкости объекта регулирования по температуре сравнительно более высокие, чем те же коэффициенты по относительной влажности. Очень часто на практике приходится отказываться от двухпозиционного регулирования температуры в подобных цехах.
4. Недопустимость резкого и значительного отклонения параметров регулирующей среды при соблюдении требований к колебаниям регулируемых параметров.
Например, температура приточного воздуха при двухпозиционном регулировании теплопроизводительности калорифера приточной камеры может иметь столь существенные отклонения, что они вызовут неприятные ощущения дутья на рабочих местах. В целом же колебания внутренней температуры не превысят установленных пределов.
Это обстоятельство можно также объяснить различными величинами коэффициентов емкости калорифера как объекта регулирования температуры приточного воздуха и производственного помещения как объекта регулирования внутренней температуры.
Таким образом, если имеется подходящая характеристика объекта и нет причин для отказа от двухпозиционного регулятора, всегда нужно стремиться к установке последнего. Этот вид регулятора оказывается наиболее простым и дешевым, надежным в эксплуатации и не требующим квалифицированного ухода. Кроме того, такие регуляторы обеспечивают устойчивое качество регулирования.
Немаловажным обстоятельством является и то, что на привод двухпозиционного регулятора очень часто требуется минимум затрат энергии, так как она используется только в моменты закрытия или открытия.
Двухпозиционные регуляторы очень часто используются для автоматического регулирования температуры в электрических печах.