

 Замкнутые системы автоматического управления (САУ) отличаются от разомкнутых применяемой аппаратурой и полнотой автоматизации. В разомкнутой САУ задающее устройство (включающая, регулирующая аппаратура) не получает информацию о фактическом режиме работы электроустановки (приводного электродвигателя, рабочей машины).
Замкнутые системы автоматического управления (САУ) отличаются от разомкнутых применяемой аппаратурой и полнотой автоматизации. В разомкнутой САУ задающее устройство (включающая, регулирующая аппаратура) не получает информацию о фактическом режиме работы электроустановки (приводного электродвигателя, рабочей машины).
В замкнутой САУ информация передается на элементы управления, что сопровождается подачей соответствующих командных сигналов. Цепочка, передающая такую информацию, замыкает контур управления, образуя замкнутую САУ, или САУ с обратными связями.
Различие между замкнутой и разомкнутой САУ можно пояснить па примере регулирования скорости электродвигателя в системе генератор — двигатель (Г—Д). В разомкнутой САУ (рис. 1,а) заданная скорость электродвигателя устанавливается вручную потенциометром П. Контроль скорости осуществляется визуально по тахометру, получающему питание от тахогенератора ТГ. Всякое отклонение скорости от заданной оператор устраняет воздействием на движок потенциометра.
В замкнутой САУ (рис. 1,б) якорь тахогенератора ТГ включен в цепь обмотки возбуждения генератора ОВГ, создавая замкнутую систему, или систему с обратной связью (в данном случае с обратной связью по скорости).
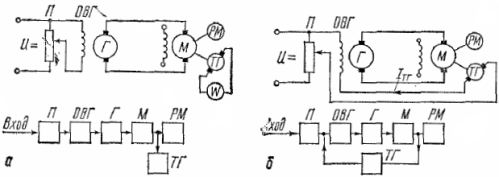
Рис. 1. Схема регулирования электродвигателя в системе Г- М: а - разомкнутая САУ, б - замкнутая САУ
Ток, создаваемый тахогенератором (Iтг) в замкнутой цепи, направлен навстречу току потенциометра (Iп), и в цепи действует результирующий ток, равный геометрической разности этих токов. Движком потенциометра оператор устанавливает такое значение результирующего тока в обмотке возбуждения ОВГ, при котором обеспечивается соответствующая скорость электродвигателя. На этом роль оператора заканчивается. В дальнейшем система автоматически с определенной точностью поддерживает заданный режим работы электропривода.
Допустим, что в результате наброса нагрузки скорость электродвигателя уменьшилась по сравнению с заданной. Уменьшение скорости сопровождается соответствующим уменьшением скорости тахогенератора и напряжения на его зажимах. Это в свою очередь вызовет уменьшение тока Iтг в цепи обратной связи и в определенном положении движка потенциометра — увеличение результирующего тока в обмотке возбуждения генератора. Соответственно возрастут напряжение на генераторе и скорость электродвигателя.
Процесс увеличения скорости и напряжения будет продолжаться до тех пор, пока ток в цепи обратной связи не достигнет установленного значения, а скорость электродвигателя — заданной величины.
При анализе систем автоматического управления широко используют функциональные схемы. На рис. 2 показана функциональная схема САУ, которая включает следующие элементы:
1 — задающее устройство, которое задает режим работы, подает командный, начальный импульс или сигнал,
2 — элемент сравнения. В него входит сигнал Х1 от задающего устройства, сигнал Х0, определяющий норму или уровень контролируемой величины. С учетом сигнала от элемента 9-й главной обратной связи элемент 2 сравнивает поступившие сигналы и посылает дальше скорректированный сигнал Х2,
3 — преобразующий элемент, поступающий в него сигнал оп преобразует в другую форму, более удобную для дальнейшей передачи. Например, сигнал Х2 был дан в форме гидравлического (пневматического, механического) давления. Элемент 3 преобразовал его в электрический ток. Так как подобного рода преобразование может требовать дополнительной энергии, то элемент 3 связан с источником энергии ПЭ,
4 — суммирующий элемент, в него поступают два сигнала: Х3 и Х8 от корректирующего элемента (элемента памяти) 8. Эти сигналы суммируются элементом 4 в направляются в следующий элемент,
5 — элемент усиления, входящий сигнал Х1 может быть слабым и для последующей передачи должен быть усилен. Это делается элементом 5, который связан с источником энергии ПЭ,
6 — исполнительный элемент, выполняет полученный сигнал (электродвигатель, электромагнитное реле, серводвигатель),
7 — регулируемый объект, или рабочая машина.
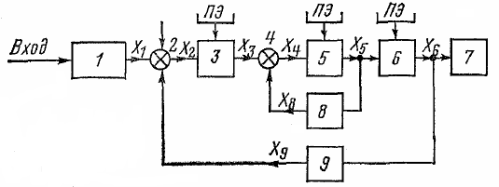
Рис. 2. Функциональная схема САУ
Каждый элемент автоматики — это преобразователь энергии, на вход которого подается величина X', а с выхода снимается величина X". Для каждого элемента в установившемся режиме существует определенная зависимость X" (X') называемая статической характеристикой.
Замкнутая система автоматического управления характеризуется наличием обратных связей, она имеет по крайней мере одну обратную связь, соединяющую выход системы с ее входом. Кроме того, могут быть так называемые внутренние обратные связи, соединяющие выход и вход отдельных элементов САУ.
Обратные связи делятся на жесткие и гибкие. Жесткие связи действуют как в переходном, так и в установившемся режимах работы системы, гибкие— только в переходном. Различают положительные обратные связи и отрицательные. При увеличении регулируемой величины положительная связь еще больше ее увеличивает, а отрицательная, наоборот, уменьшает. Обратные связи могут передавать сигналы, пропорциональные углу поворота, скорости, напряжению, току и т. п. и соответственно называются обратными связями по углу, скорости, напряжению, току.Подробнее смотрите здесь: Элементы систем автоматики
По принципу действия САУ можно разделить на три группы:
-
непрерывного действия, в которых не нарушается связь между контролируемой и заданной величинами,
-
импульсного действия, в которых связь между контролируемой и заданной величинами осуществляется через определенные промежутки времени,
-
релейного действия, в которых связь осуществляется только тогда, когда заданная величина достигает определенного значения.
В зависимости от закона, по которому изменяется заданная величина во времени, САУ можно разделить также на три группы:
-
системы с постоянным или малоизменяющимся значением заданной величины, в которых автоматически регулируемая величина поддерживается постоянной. Это системы стабилизации, которые по существу являются системами автоматического регулирования (САР),
-
системы, в которых заданная величина изменяется по определенной, заранее установленной программе. Это система программного управления,
-
системы, в которых заданная величина может изменяться в широких пределах и по произвольному закону, т. е. следящие системы.