

 Современные системы электроприводов крановых механизмов выполняются в основном с применением асинхронных двигателей, скорость которых регулируется релейно-контакторным способом путем введения сопротивлений в цепь ротора. Такие электроприводы обладают малым диапазоном регулирования скорости, а при пусках и торможениях создают большие рывки и ускорения, что плохо влияет на работу конструкции крана, ведет к раскачиванию груза и ограничивает применение таких систем на кранах повышенной высоты и грузоподъемности.
Современные системы электроприводов крановых механизмов выполняются в основном с применением асинхронных двигателей, скорость которых регулируется релейно-контакторным способом путем введения сопротивлений в цепь ротора. Такие электроприводы обладают малым диапазоном регулирования скорости, а при пусках и торможениях создают большие рывки и ускорения, что плохо влияет на работу конструкции крана, ведет к раскачиванию груза и ограничивает применение таких систем на кранах повышенной высоты и грузоподъемности.
Развитие силовой полупроводниковой техники позволяет вносить принципиально новые решения в структуру автоматизированного электропривода крановых установок. В настоящее время на механизмах подъема и передвижения башенных и мостовых кранов применяется регулируемый электропривод с двигателями постоянного тока, питаемыми от мощных тиристорных преобразователей, — система ТП — Д.
Скорость двигателя в таких системах регулируется в диапазоне (20 ÷ 30):I путем изменения напряжения на якоре. При этом в переходных процессах система обеспечивает получение ускорений и рывков в пределах заданных норм.
Хорошие регулировочные качества появляются и у асинхронного электропривода при включении тиристорного преобразователя в цепь статора асинхронного двигателя (АД). Изменение напряжения на статоре двигателя в замкнутой САУ позволяет ограничить пусковой момент, получить плавный разгон (торможение) привода и необходимый диапазон регулирования скорости.
Применение тиристорных преобразователей в автоматизированном электроприводе крановых механизмов находит все большее применение в отечественной и зарубежной практике. Для ознакомления с принципом действия и возможностями таких установок остановимся кратко на двух вариантах схем управления двигателями постоянного и переменного токов.
На рис. 1 изображена принципиальная схема тиристорного управления двигателем постоянного тока независимого возбуждения для механизма подъема мостового крана. Якорь двигателя питается от реверсивного тиристорного преобразователя, который состоит из силового трансформатора Тр, служащего для согласования напряжений преобразователя и нагрузки, двух групп тиристоров Т1— Т6 и Т7 — Т12, соединенных по трехфазной мостовой встречно-параллельной схеме, уравнительных реакторов 1УР и 2УР, являющихся одновременно сглаживающими реакторами, выполненными ненасыщающимися.
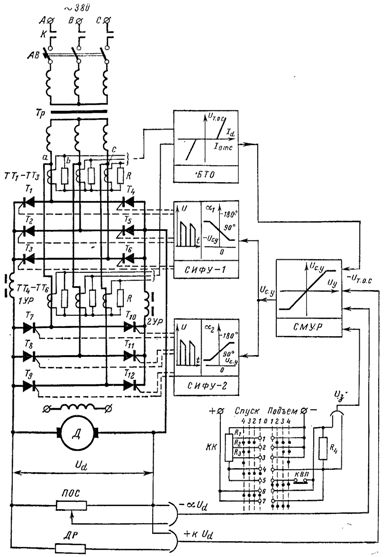
Рис. 1. Схема кранового электропривода по системе ТП—Д.
Группа тиристоров Т1 — Т6 работает выпрямителем при подъеме и инвертором — при спуске тяжелых грузов, так как направление тока в якорной цепи двигателя для этих режимов одинаково. Вторая группа тиристоров Т7 — Т12, обеспечивающая противоположное направление тока якоря, работает выпрямителем при силовом спуске и в переходных режимах пуска двигателя на тормозной спуск, инвертором — при торможении в процессе подъема грузов или крюка.
« Подписывайтесь на наши каналы в Telegram: Школа для электрика и Электрика, электромонтажные работы
В отличие от механизмов передвижения кранов, в которых тиристорные группы должны быть одинаковыми, в механизмах подъема мощность тиристоров второй группы может быть взята меньшей, чем первой, так как ток двигателя при силовом спуске значительно меньше, чем при подъеме и спуске тяжелых грузов.
Регулирование выпрямленного напряжения тиристорного преобразователя (ТП) осуществляется с помощью полупроводниковой системы импульсно-фазового управления, состоящий из двух блоков СИФУ-1 и СИФУ-2 (рис. 1), каждый из которых подает на соответствующий тиристор по два отпирающих импульса, сдвинутых на 60°.
С целью упрощения системы управления и повышения надежности электропривода в данной схеме применяется согласованное управление реверсивным ТП. Для этого регулировочные характеристики и системы управления обеими группами должны быть жестко связаны. Если на тиристоры Т1 — Т6 подаются отпирающие импульсы, обеспечивающие выпрямительный режим работы этой группы, то на тиристоры Т7 — Т12 отпирающие импульсы подаются так, чтобы эта группа была подготовлена к работе инвертором.
Углы регулирования α1 и α2 при любых режимах работы ТП должны изменяться таким образом, чтобы среднее напряжение выпрямительной группы не превышало напряжение инверторной группы, т. е. Если это условие не соблюдается, то между двумя группами тиристоров будет протекать выпрямленный уравнительный ток, который дополнительно загружает вентили и трансформатор и может также привести к срабатыванию защиты.
Однако и при правильном согласовании углов управления α1 и α2 тиристорами выпрямительной и инверторной групп возможно протекание переменного уравнительного тока вследствие неравенства мгновенных значений напряжений UαB и UαI . Для ограничения этого уравнительного тока служат уравнительные реакторы 1УР и 2УР.
По одному из реакторов всегда проходит ток якоря двигателя, благодаря чему уменьшаются пульсации этого тока, а сам реактор частично насыщается. Второй реактор, по которому в данный момент протекает только уравнительный ток, остается ненасыщенным и ограничивает iyp.
Тиристорный электропривод крана имеет одноконтурную систему управления (СУ), выполненную с использованием быстродействующего реверсивного суммирующего магнитного усилителя СМУР, который питается от генератора прямоугольного напряжения частотой 1000 Гц. При наличии токовой отсечки такая СУ позволяет получить удовлетворительные статические характеристики и высокое качество переходных процессов.
Система управления электроприводом содержит отрицательные обратные связи по напряжению и току двигателя с отсечками, а также слабую положительную обратную связь по напряжению Ud. Сигнал в цепи задающих обмоток СМУР определяется разностью задающего напряжения Uз, поступающего с резистора R4, и напряжения обратной связи αUd, снимаемого с потенциометра ПОС. Значение и полярность задающего сигнала, определяющего скорость и направление вращения привода, регулируются с помощью командоконтроллера КК.
Отсечка обратной связи по напряжению Ud осуществляется с помощью кремниевых стабилитронов, включенных параллельно задающим обмоткам СМУР. Если разница напряжений Ud — aUd будет больше Uст.н, то стабилитроны проводят ток, и напряжение на обмотках управления становится равным Uз.макс = Uст.н.
С этого момента изменение сигнала aUd в сторону уменьшения не сказывается на токе в задающих обмотках СМУР, т. е. отрицательная обратная связь по напряжению Ud не действует, что обычно имеет место при токах двигателя Id > (1,5÷1,8) Id.н.
Если сигнал обратной связи aUd приближается к задающему сигналу Uз, то напряжение на стабилитронах становится меньше Uст.н, и ток через них не проходит. Ток в задающих обмотках СМУР будет определяться разностью напряжений U3 — aUd, и отрицательная обратная связь по напряжению при этом вступает в работу.
Сигнал отрицательной обратной связи по току снимается с двух групп трансформаторов тока ТТ1 — ТТ3 и ТТ4 — ТТ8, работающих соответственно с группами тиристоров Т1 — Т6 и Т7 — Т12. В блоке токовой отсечки БТО получаемое на резисторах R трехфазное переменное напряжение U2TT ≡ Id выпрямляется, и через стабилитроны, выполняющие роль напряжения сравнения, сигнал Uт.о.с подается на токовые обмотки СМУР, понижая результирующий сигнал на входе усилителя. Это уменьшает напряжение Ud преобразователя и ограничивает ток Id цепи якоря в статических и динамических режимах.
Для получения высокого коэффициента заполнения механических характеристик ω = f(М) электропривода и поддержания постоянства ускорения (замедления) в переходных режимах дополнительно к перечисленным выше связям в схеме применяется положительная обратная связь по напряжению.
Коэффициент усиления этой связи выбирается kп.н = 1/kпр ≈ ΔUy/ΔUd. в соответствии с начальным участком характеристики Ud = f (Uy) преобразователя, но на порядок меньше коэффициента α отрицательной обратной связи по Ud. Действие этой связи в основном проявляется в зоне токовой отсечки, обеспечивая получение крутопадающих участков характеристики.
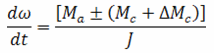
На рис. 2, а изображены статические характеристики привода подъема для различных значений задающего напряжения U3, соответствующих различным положениям командоконтроллера.
В первом приближении можно принять, что в переходных режимах пуска, реверса и торможения рабочая точка в координатных осях ω = f(М) перемещается по статической характеристике. Тогда ускорение системы:
где ω — угловая скорость, Мa — момент, развиваемый двигателем, Мс — момент сопротивления перемещаемого груза, ΔМc — момент потерь в передачах, J — приведенный к валу двигателя момент инерции.
Если пренебречь потерями в передачах, то условием равенства ускорения при пуске двигателя на подъем и спуск, а также при торможении с подъема и со спуска является равенство динамических моментов электропривода, т. е. Мдин.п = Мдин.с. Для выполнения этого условия статические характеристики привода подъема должны быть несимметричными относительно оси скорости (Мстоп.п > Мстоп.с) и иметь крутой фронт в области стопорного значения момента (рис. 2, а).
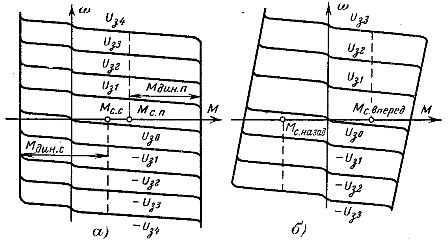
Рис. 2. Механические характеристики электропривода по системе ТП—Д: а — механизм подъема, б — механизм передвижения.
Для приводов механизмов передвижения крана следует учитывать реактивный характер момента сопротивления, который не зависит от направления движения. При одном и том же значении момента двигателя реактивный момент сопротивления будет замедлять процесс пуска и ускорять процесс торможения привода.
Для устранения этого явления, которое может привести к пробуксовыванию ведущих колес и быстрому износу механических передач, необходимо поддерживать примерно постоянными ускорения в процессе пуска, реверса и торможения в механизмах передвижения. Это достигается получением статических характеристик ω = f (М), приведенных на рис. 2, б.
Указанные разновидности механических характеристик электропривода можно получить путем соответствующего изменения коэффициентов отрицательной обратной связи по току Id и положительной связи по напряжению Ud.
Полная схема управления автоматизированного электропривода мостового крана с тиристорным управлением включает в себя все блокировочные связи и защитные цепи, которые рассмотрены в приведенных ранее схемах.
При применении ТП в электроприводе крановых механизмов следует обратить внимание на их электроснабжение. Значительная несинусоидальность потребляемого преобразователями тока вызывает искажение формы напряжения на входе преобразователя. Эти искажения влияют на работу силовой части преобразователя и системы импульсно-фазового управления (СИФУ). Искажение формы напряжения питающей сети вызывает значительное недоиспользование электродвигателя.
Искажение формы питающего напряжения оказывает сильное влияние на СИФУ, особенно при отсутствии входных фильтров. В отдельных случаях эти искажения могут привести к произвольному полному открыванию тиристоров. Наилучшим способом это явление можно устранить путем питания СИФУ от отдельных троллеев, подключенных к трансформатору, не имеющему выпрямительной нагрузки.
Возможные способы использования тиристоров для регулирования скорости асинхронных двигателей весьма разнообразны — это тиристорные преобразователи частоты (автономные инверторы), тиристорные регуляторы напряжения, включаемые в цепь статора, импульсные регуляторы сопротивлений и токов в цепях двигателя и т. д.
« Подписывайтесь на наши каналы в Telegram: Школа для электрика и Электрика, электромонтажные работы
В крановых электроприводах находят применение главным образом тиристорные регуляторы напряжения и импульсные регуляторы, что обусловлено их относительной простотой и надежностью. Однако использование каждого из указанных регуляторов в отдельности не позволяет полностью обеспечить требования, предъявляемые к электроприводам крановых механизмов.
Действительно, при использовании только лишь импульсного регулятора сопротивления в цепи ротора асинхронного двигателя удается обеспечить зону регулирования, ограниченную естественной и соответствующей полному сопротивлению реостатной механическими характеристиками, т. е. зона регулирования соответствует двигательному режиму и режиму противовключения с неполным заполнением I и IV или III и II квадрантов плоскости механических характеристик.
Применение тиристорного регулятора напряжения, особенно реверсивного, принципиально обеспечивает зону регулирования скорости, покрывающую всю рабочую часть плоскости М, ω от —ωн до + ωн и от — Мк до +Мк. Однако при этом будут иметь место значительные потери скольжения в самом двигателе, что приводит к необходимости существенного завышения его установленной мощности, а следовательно, и его габаритов.
В связи с этим для крановых механизмов создаются системы асинхронного электропривода, в которых управление двигателем осуществляется путем сочетания импульсного регулирования сопротивления в роторе и изменения напряжения, подводимого к статору. Этим достигается заполнение всех четырех квадрантов механических характеристик.
Принципиальная схема такого комбинированного управления приведена на рис. 3. В роторную цепь включена схема импульсного регулирования сопротивления в цепи выпрямленного тока. Параметры схемы выбраны такими, что она обеспечивает работу двигателя в I и III квадрантах в зонах между реостатными и естественными характеристиками (на рис. 4 заштрихованы вертикальными линиями).
Рис. 3. Схема кранового электропривода с тиристорным регулятором напряжения статора и импульсным регулированием сопротивления ротора.
Для регулирования скорости в зонах между реостатными характеристиками и осью скоростей, заштрихованных горизонтальными линиями на рис. 4, а также для реверсирования двигателя используется тиристорный регулятор напряжения, состоящий из пар включенных встречно-параллельно тиристоров 1—2, 4—5, 6—7, 8—9, 11—12. Изменение напряжения, подводимого к статору, осуществляется путем регулирования угла открывания тиристорных пар 1—2, 6—7, 11—12 — для одного направления вращения и 4—5, 6—7, 8—9 — для другого направления вращения.
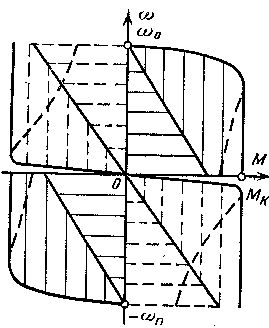
Рис. 4. Области регулирования при комбинированном управлении асинхронным двигателем.
Для получения жестких механических характеристик и ограничения моментов двигателя в схеме предусмотрены обратные связи по скорости и выпрямленному току ротора, осуществляемые тахогенератором ТГ и трансформатором постоянного тока (магнитным усилителем) ТПТ
Более просто можно получить заполнение всего I квадранта, включив конденсатор последовательно с сопротивлением R1 (рис. 3). В этом случае эквивалентное сопротивление в цепи выпрямленного тока ротора можно изменять в пределах от нуля до бесконечности и осуществлять таким образом регулирование тока в роторе от максимального значения до нуля.
Область регулирования скорости двигателя в такой схеме распространяется вплоть до оси ординат, однако величина емкости конденсатора при этом получается весьма значительной.
Для заполнения всего I квадранта при меньших значениях емкости сопротивление резистора R1 разбивают на отдельные ступени. В первую ступень, включаемую при небольших токах, последовательно вводят емкость. Выведение ступеней осуществляется импульсным методом с последующим закорачиванием каждой из них тиристорами или контакторами. Заполнение всего I квадранта можно получить также путем сочетания импульсного изменения сопротивления с импульсным режимом двигателя. Такая схема приведена на рис. 5.
В области между осью скоростей и реостатной характеристикой (рис. 4) двигатель работает в импульсном режиме. При этом на тиристор Т3 управляющие импульсы не поступают, и он остается все время закрытым. Схема, осуществляющая импульсный режим двигателя, состоит из рабочего тиристора Т1 вспомогательного тиристора Т2, коммутирующего конденсатора С и резисторов R1 и R2. При открытом тиристоре Т1 ток протекает через резистор R1. Конденсатор С заряжается до напряжения, равного падению напряжения на R1.
Когда подается управляющий импульс на тиристор Т2, напряжение конденсатора оказывается приложенным в обратном направлении к тиристору Т1 и закрывает его. Одновременно происходит перезаряд конденсатора. Наличие индуктивности двигателя приводит к тому, что процесс перезаряда конденсатора носит колебательный характер, вследствие чего тиристор Т2 закрывается самостоятельно без подачи управляющих сигналов, а цепь ротора оказывается разомкнутой. Затем подается управляющий импульс на тиристор Т1, и все процессы повторяются снова.
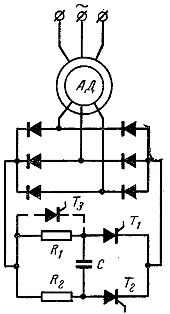
Рис. 5. Схема импульсного комбинированного управления асинхронным двигателем
Таким образом, при периодической подаче управляющих сигналов на тиристоры какую-то часть периода в роторе протекает ток, определяемый сопротивлением резистора R1. В другую часть периода цепь ротора оказывается разомкнутой, момент, развиваемый двигателем, равен нулю, а его рабочая точка находится на оси .скоростей. Изменяя относительную продолжительность включения тиристора Т1 в течение периода, можно получать среднее значение момента, развиваемого двигателем от нуля до максимального значения, соответствующего работе на реостатной характеристике при введении в цепь ротора R1
При использовании различных обратных связей можно получить характеристики желаемого вида в области между осью скоростей и реостатной характеристикой. Для перехода в область между реостатной и естественной характеристиками нужно, чтобы тиристор Т2 оставался все время закрытым, а тиристор Т1 — все время открытым. Путем закорачивания сопротивления R1 с помощью коммутатора с основным тиристором Т3 можно плавно изменять сопротивление в цепи ротора от значения R1 до 0, обеспечивая тем самым выход двигателя на естественную характеристику.
Импульсный режим двигателя с коммутацией в цепи ротора может быть осуществлен и в режиме динамического торможения. При использовании различных обратных связей можно получить в этом случае во II квадранте желаемые механические характеристики. С помощью логической схемы управления возможно осуществлять автоматический переход двигателя из одного режима к другому и получить заполнение всех квадрантов механических характеристик.