

В системах автоматики применяются три способа регулирования:
1) по отклонению регулируемой величины,
2) по возмущению (по нагрузке),
3) комбинированный.
Способ регулирования по отклонению регулируемой величины рассмотрим на примере системы регулирования частоты вращения двигателя постоянного тока (рис. 1).
При работе двигатель Д, являясь объектом регулирования, испытывает на себе действие различных возмущений (изменения нагрузки на валу двигателя, напряжения питающей сети, частоты вращения двигателя, приводящего во вращение якорь генератора Г, изменение температуры окружающей среды, приводящее в свою очередь к изменению сопротивления обмоток, а следовательно, и токов и т. п.).
Все эти возмущения вызовут отклонение частоты вращения двигателя Д, что повлечет за собой изменение э. д. с. тахогенератора ТГ. В цепь тахогенератора ТГ включен реостат Р1. Напряжение U0, снимаемое с реостата P1 включено встречно с напряжением тахогенератора ТГ. В результате этого получается разность напряжений е = U0 - Uтг, которая через усилитель У подается на двигатель ДП, перемещающий ползунок реостата Р. Напряжение U0 соответствует заданному значению регулируемой величины - частоте вращения ωо, а напряжение тахогенератора Uтг - текущему значению частоты вращения.
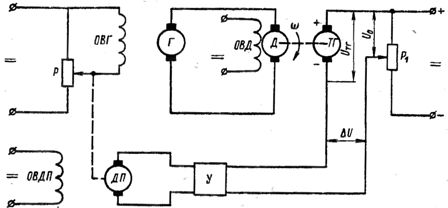
Рис. 1. Принципиальные схемы управления частотой вращения двигателя постоянного тока по замкнутому циклу: Р - реостат, ОВГ - обмотка возбуждения генератора, Г - генератор, ОВД - обмотка возбуждения двигателя, Д - двигатель, ТГ - тахогенератор, ДП - двигатель привода ползунка реостата, У - усилитель.
Если под действием возмущений разность между этими величинами (отклонение) превысит заданный предел, то на регулятор поступит задающее воздействие в виде изменения тока возбуждения генератора, которое заставит это отклонение уменьшиться. В общем случае система, работающая по способу отклонения, представлена схемой на рис. 2, а.
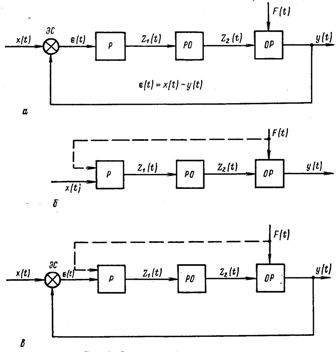
Рис. 2. Схемы способов регулирования: а - по отклонению, б - по возмущению, в - комбинированный, Р - регулятор, РО - регулирующий орган, ОР - объект регулирования, ЭС - элемент сравнения, х(t) - задающее воздействие, Z1(t) и Z2 (t) - внутренние регулирующие воздействия, у(t) - регулируемая величина, F(t) - возмущающее воздействие.
Отклонение регулируемой величины приводит в действие регулирующий орган, это действие всегда направлено так, что оно уменьшает отклонение. Для получения разности величин ε(t) = x(t) - у (f) в систему вводится элемент сравнения ЭС.
Действие регулирующего органа при регулировании по отклонению происходит независимо от того, по какой причине произошло изменение регулируемой величины. Это, несомненно, является большим достоинством данного способа.
Способ регулирования по возмущению, или компенсация возмущения, основан на том, что в системе применяются устройства, компенсирующие влияние изменения возмущающего воздействия.
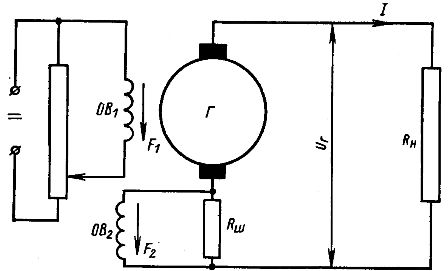
Рис. 3. Принципиальная схема регулирования напряжения генератора постоянного тока: Г - генератор, ОВ1 и ОВ2 - обмотки возбуждения генератора, Rн - сопротивление нагрузки, F1 и F2 - магнитодвижущие силы обмоток возбуждения, Rш - сопротивление.
В качестве примера рассмотрим работу генератора постоянного тока (рис. 3). Генератор имеет две обмотки возбуждения: ОВ1 включаемую параллельно якорной цепи, и ОВ2, включаемую на сопротивление Ri. Обмотки возбуждения включены так, что их м. д. с. F1 и F2 складываются. Напряжение на клеммах генератора будет зависеть от суммарной м. д. с. F = F1+F2.
При увеличении тока нагрузки I (сопротивление нагрузки Rн уменьшается) напряжение генератора Uг должно было бы уменьшиться за счет увеличения падения напряжения в якорной цепи генератора, но этого не произойдет потому, что м. д. с. F2 обмотки возбуждения ОВ2 возрастает, так как она пропорциональна току нагрузки I.
Это приведет к возрастанию суммарной м. д. с, а следовательно, к выравниванию напряжения генератора. Так происходит компенсация падения напряжения при изменении тока нагрузки - основного возмущения на генератор. Сопротивление Rш в данном случае является устройством, позволяющим измерять возмущение - нагрузку.
В общем случае схема системы, работающей по способу компенсации возмущения, показана на рис. 2, б.
Возмущающие воздействия могут быть вызваны разными причинами, поэтому их может быть не одно, а несколько. Это приводит к усложнению анализа работы системы автоматического регулирования. Обычно ограничиваются рассмотрением возмущающих воздействий, вызванных основной причиной, например изменением нагрузки. В этом случае регулирование называют регулированием по нагрузке.
Комбинированный способ регулирования (см. рис. 2, в) сочетает в себе два предыдущих способа: по отклонению и по возмущению. Он применяется при построении сложных систем автоматики, где требуется высококачественное регулирование.
Как следует из рис. 2, при любом способе регулирования всякая система автоматического регулирования состоит из регулируемой (объект регулирования) и регулирующей (регулятор) частей. Регулятор во всех случаях должен иметь чувствительный элемент, который измеряет отклонение регулируемой величины от предписанного значения, а также регулирующий орган, который обеспечивает восстановление заданного значения регулируемой величины после ее отклонения.
Если в системе регулирующий орган получает воздействие непосредственно от чувствительного элемента и приводится им в действие, то такая система регулирования называется системой прямого регулирования, а регулятор - регулятором прямого воздействия.
В регуляторах прямого действия чувствительный элемент должен развивать достаточную мощность для изменения положения регулирующего органа. Это обстоятельство ограничивает область применения прямого регулирования, так как чувствительный элемент стремятся сделать малогабаритным, что в свою очередь создает трудность в получении усилий, достаточных для перемещения регулирующего органа.
Для повышения чувствительности измерительного элемента и получения достаточной мощности для перемещения регулирующего органа применяются усилители мощности. Регулятор, работающий с усилителем мощности, называется регулятором непрямого действия, а система в целом - системой непрямого регулирования.
В системах непрямого регулирования для перемещения регулирующего органа используют вспомогательные механизмы, действующие от постороннего источника энергии или за счет энергии регулируемого объекта. При этом чувствительный элемент воздействует только на управляющий орган вспомогательного механизма.
Классификация способов регулирования автоматики по виду регулирующих воздействий
Регулирующий сигнал вырабатывается системой регулирования на основании задающего воздействия и сигнала с чувствительного элемента, измеряющего действительное значение регулируемой величины. Полученный таким образом регулирующий сигнал поступает на регулятор, который преобразовывает его в регулирующее воздействие исполнительного механизма.
Исполнительный механизм заставляет регулирующий орган объекта принять такое положение, при котором регулируемая величина стремится к заданному значению. При работе системы происходит непрерывное измерение текущего значения регулируемой величины, поэтому регулирующий сигнал также будет вырабатываться непрерывно.
Однако регулирующее воздействие исполнительного механизма в зависимости от устройства регулятора может быть непрерывным или иметь прерывистый характер. На рис. 4, а представлена кривая отклонения Δу регулируемой величины у по времени от заданного значения у0, одновременно в нижней части рисунка показано, как должно непрерывно меняться регулирующее воздействие Z. Оно находится в линейной зависимости от регулирующего сигнала и совпадает с ним по фазе.
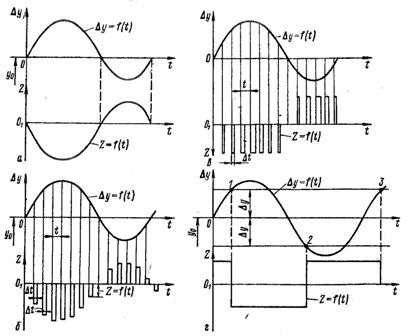
Рис. 4. Диаграммы основных видов регулирующих воздействий: а - непрерывное, б, в - прерывистое, г - релейное.
Регуляторы, вырабатывающие такое воздействие, называются регуляторами непрерывного действия, а само регулирование - непрерывным регулированием. Регуляторы, построенные по такому принципу, работают только тогда, когда существует регулирующее воздействие, т. е. пока имеется отклонение между действительным и предписанным значением регулируемой величины.
Если в процессе работы системы автоматики регулирующее воздействие при непрерывном регулирующем сигнале прерывается в некоторые промежутки времени или подается в форме отдельных импульсов, то регуляторы, работающие по такому принципу, называются регуляторами прерывистого действия (шаговыми, или импульсными). Принципиально возможны два способа формирования прерывистого регулирующего воздействия.
На рис. 4, б и в представлены графики прерывистого регулирующего воздействия при непрерывном отклонении Δ регулируемой величины.
В первом случае регулирующее воздействие представлено отдельными импульсами одинаковой длительности Δt, следующими через равные интервалы времени t1 = t2 = t при этом величина импульсов Z = f(t) пропорциональна значению регулирующего сигнала в момент формирования регулирующего воздействия.
Во втором случае все импульсы имеют одинаковую величину Z = f(t) и следуют через равные интервалы времени t1 = t2 = t но имеют различную длительность Δt. При этом длительность импульсов зависит от значения сигнала регулирования в момент формирования регулирующего воздействия. Регулирующее воздействие от регулятора передается регулирующему органу с соответствующими перерывами, поэтому регулирующий орган меняет свое положение также с перерывами.
В практике широкое применение находят также системы регулирования релейного типа. Принцип действия релейного регулирования рассмотрим на примере работы регулятора с двухпозиционным регулированием (рис. 4, г).
К регуляторам двухпозиционного регулирования относятся такие регуляторы, которые имеют только два устойчивых положения: одно - когда отклонение регулируемой величины перейдет установленный положительный предел +Δу, и другое - когда отклонение изменит знак и достигнет отрицательного предела -Δу.
Регулирующее воздействие в обеих позициях одинаково по абсолютной величине, но различно по знаку, причем это воздействие через регулятор заставляет регулирующий орган перемещаться скачкообразно таким образом, чтобы абсолютная величина отклонения всегда уменьшалась. Если величина отклонения Δу достигнет допустимого положительного значения +Δу (точка 1), сработает реле и на объект через регулятор и регулирующий орган будет действовать регулирующее воздействие -Z, которое противоположно по знаку, но равно по величине положительному значению регулирующего воздействия +Z. Отклонение регулируемой величины по истечении некоторого времени будет уменьшаться.
Достигнув точки 2, отклонение Δу станет равным допустимому отрицательному значению -Δу, реле сработает и регулирующее воздействие Z изменит свой знак на противоположный и т. д. Релейные регуляторы в сравнении с другими регуляторами просты по устройству, сравнительно недороги и находят широкое применение в тех объектах, где не требуется большая чувствительность к возмущающим воздействиям.