

Управление двигателем постоянного тока в САУ подразумевает либо изменение скорости вращения пропорционально некоторому сигналу управления, либо поддержание этой скорости неизменной при воздействии внешних дестабилизирующих факторов.
Используются 4 основные метода управления, реализующие перечисление выше принципы:
-
реостатно-контакторное управление;
-
управление по системе «генератор-двигатель» (Г-Д);
-
управление по системе «управляемый выпрямитель –Д» (УВ-Д);
-
импульсное управление.
Подробное исследование этих способов – предмет ТАУ и курса «Основы электропривода». Мы рассмотрим только основные положения, имеющие непосредственное отношение к электромеханике.

Реостатно-контакторное управление
Обычно используются 3 схемы:
-
при регулировке скорости n от 0 до nном в цепь якоря включают реостат (якорное управление);
-
при необходимости получить n > nном реостат включают в цепь ОВ (полюсное управление);
-
для регулирования скорости n < nном и n > nном реостаты включают как в цепь якоря, так и в цепь ОВ.
Перечисленные схемы применяются при ручном управлении. Для автоматического управления используют ступенчатое переключение Rра и Rрв с помощью контакторов (реле, электронных коммутаторов).
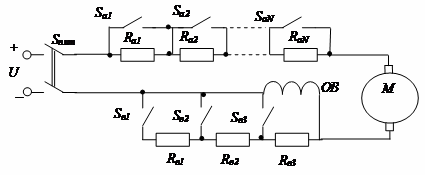
Если требуется точное и плавное регулирование скорости, число коммутируемых резисторов и элементов коммутации должно быть большим, из-за чего увеличиваются габариты системы, стоимость и снижается надежность.
Управление по системе Г-Д
Регулирование частоты вращения от 0 до по схеме рис. производится регулировкой Rв (Uгизменяется от 0 до nном). Для получения скорости двигателя больше nном - изменением Rвд (уменьшение тока ОВ двигателя уменьшает его основной поток Ф, что и приводит к увеличению скорости n).
Переключатель S1 предназначен для реверса двигателя (изменения направления вращения его ротора).
Поскольку управление Д осуществляется путем регулирования сравнительно малых токов возбуждения Г и Д, оно легко адаптируется к задачам САУ.
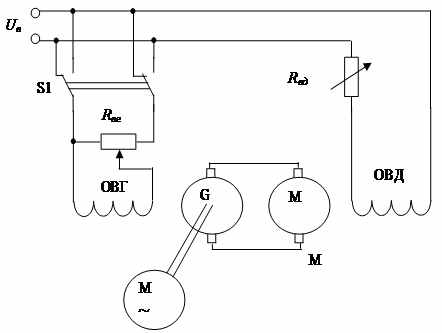
Недостаток такой схемы – большие габариты системы, масса, низкий КПД, поскольку здесь имеется трехкратное преобразование преобразование энергии (электрической в механическую и обратно, и на каждом этапе имеются потери энергии).
Управление по системе «управляемый выпрямитель – двигатель»
Система «управляемый выпрямитель – двигатель» (см. рисунок) похожа на предыдущую, но вместо электромашинного источника регулируемого напряжения, состоящего из, например, трехфазного, двигателя переменного тока и Г=Т, используется управляемый, например, тоже трехфазный тиристорный электронный выпрямитель.
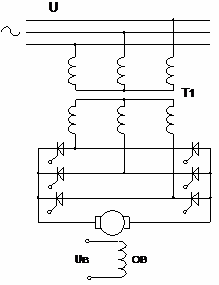
Сигналы управления формируются отдельным блоком управления и обеспечивают требуемый угол открывания тиристоров, пропорциональный сигналу управления Uу.
Достоинства такой системы - высокий КПД, малые габариты и масса.
Недостатком по сравнению с предыдущей схемой (Г-Д) является ухудшение условий коммутации Д из-за пульсаций его тока якоря, особенно при питании от однофазной сети.
Импульсное управление
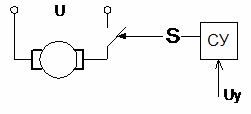
На двигатель с помощью импульсного прерывателя подаются импульсы напряжения, модулированные (ШИМ, ВИМ) в соответствии с управляющим напряжением.
Таким образом, изменение скорости вращения якоря достигается не за счет изменения напряжения управления, а путем изменения времени, в течение которого к двигателю подводится номинальное напряжение. Очевидно, что работа двигателя состоит из чередующихся периодов разгона и торможения (см. рисунок).
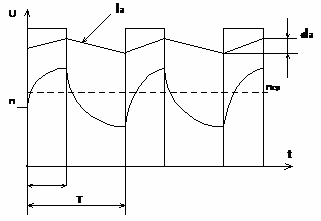
Если эти периоды малы по сравнению с полным временем разгона и остановки якоря, то скорость n не успевает к концу каждого периода достигать установившихся значений nном при разгоне или n = 0 при торможении, и устанавливается некоторая средняя скорость nср, величина которой определяется относительной продолжительностью включения.
Поэтому в САУ требуется схема управления, назначение которой – преобразование постоянного или изменяющегося сигнала управления в последовательность управляющих импульсов с относительной продолжительностью включения, являющейся заданной функцией величины этого сигнала. В качестве элементов коммутации используются силовые полупроводниковые приборы – полевые и биполярные транзисторы, тиристоры.