

Промышленный робот - это не просто механическая рука. По международному определению, это автоматическая манипуляционная машина, применяемая в производственных процессах и предназначенная для выполнения двигательных и управляющих действий. Но за этой сухой формулировкой скрывается целая наука о движении: способность машины выполнять ту или иную задачу определяется прежде всего архитектурой её кинематической цепи - тем, как именно звенья соединены между собой и в каком пространстве они способны двигаться.

Что такое кинематика применительно к роботу
Кинематика изучает движение механических систем без учёта действующих на них сил. В контексте промышленного робота она существует в двух формах. Прямая кинематика отвечает на вопрос, где находится инструмент при известных углах поворота всех звеньев. Обратная решает задачу иначе: по заданному положению инструмента вычисляет необходимые углы каждого сустава.
Именно обратная кинематика представляет главную вычислительную трудность - для одного положения инструмента может существовать несколько допустимых наборов углов, а в особых конфигурациях, называемых сингулярными, робот теряет управляемость по одной или нескольким осям.
Для стандартизированного описания кинематических цепей применяется метод Денавита-Хартенберга. Каждое звено описывается четырьмя параметрами: длиной звена, углом между осями смежных звеньев, смещением вдоль оси и углом вращения вокруг неё.
Последовательное перемножение матриц преобразования для каждого звена даёт итоговое положение инструмента в пространстве. Это не абстрактная математика: некорректное решение задачи обратной кинематики на одном из автомобильных заводов США в 2017 году привело к остановке целой производственной линии и значительным финансовым потерям.
Число степеней подвижности - суммарное количество независимых координатных движений, которые машина способна совершить относительно неподвижного основания - определяет универсальность робота. Роботы могут иметь от двух до шести степеней подвижности и более, причём погрешность позиционирования варьируется от ±5 мм для грубых работ до менее ±0,1 мм для высокоточных операций.
Шестиосевой шарнирный манипулятор
Шарнирный, или антропоморфный, робот - наиболее универсальная и широко распространённая конструкция в промышленной робототехнике.
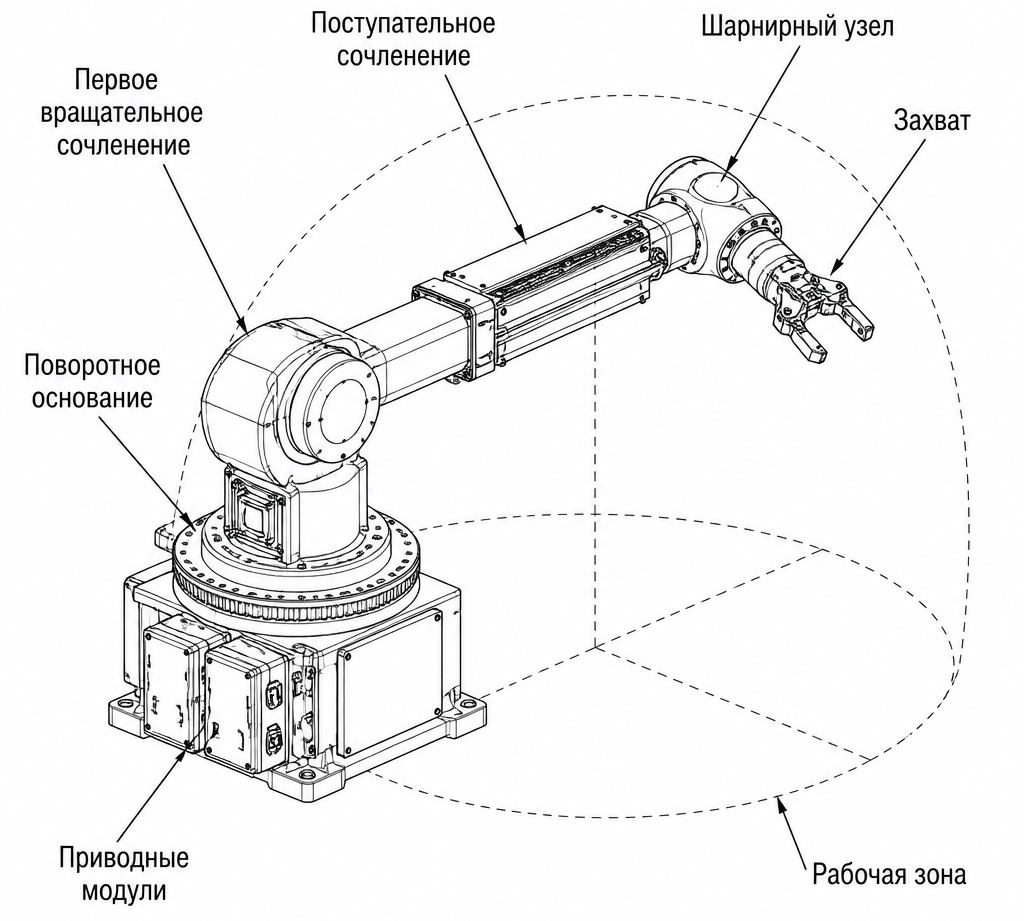
Он состоит из последовательно соединённых звеньев с шестью вращательными сочленениями, образующими кинематическую цепь, функционально идентичную человеческой руке: плечо задаёт ориентацию в пространстве, локоть обеспечивает досягаемость, а три оси запястья определяют положение инструмента. Шесть степеней свободы позволяют инструменту принять любое положение и любую ориентацию в трёхмерном рабочем пространстве.
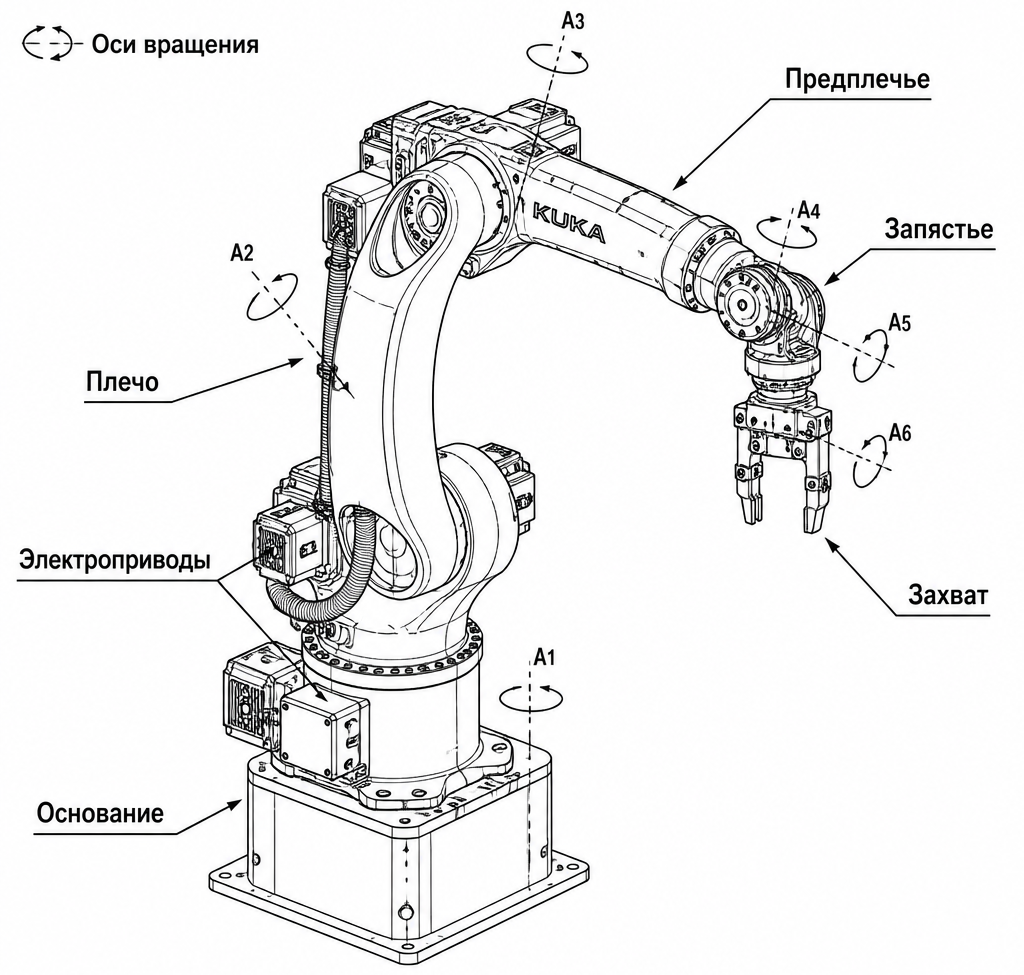
Конструкция шарнирного промышленного робота-манипулятора KUKA
Это предопределяет широчайший спектр применений. Шарнирные роботы выполняют контурную дуговую и точечную сварку, нанесение покрытий и красок на сложные пространственные поверхности, в том числе автомобильные кузова, а также фрезерование, сборку и операции pick & place в большинстве отраслей.
Pick & place - это метод автоматизированного производства, при котором специальная машина (или робот) захватывает компонент из одного места и точно устанавливает его в заданную позицию. Термин буквально переводится как "возьми и положи".
Наиболее распространённая сфера применения - производство печатных плат по технологии поверхностного монтажа (SMT). Машина pick & place является ключевым звеном сборочной линии: она следует за трафаретным принтером, который наносит паяльную пасту, и предшествует печи оплавления.
Автоматический установщик забирает SMD-компоненты с бумажных или пластиковых лент-питателей и размещает их на плате в строгом соответствии с координатным файлом, содержащим позиционные обозначения, координаты центров и углы поворота каждого элемента.
Радиус действия шарнирных роботов достигает нескольких метров, грузоподъёмность отдельных моделей превышает тонну. Монтаж возможен на полу, стене или потолке, что позволяет вписать робота в самые нестандартные компоновки ячеек.
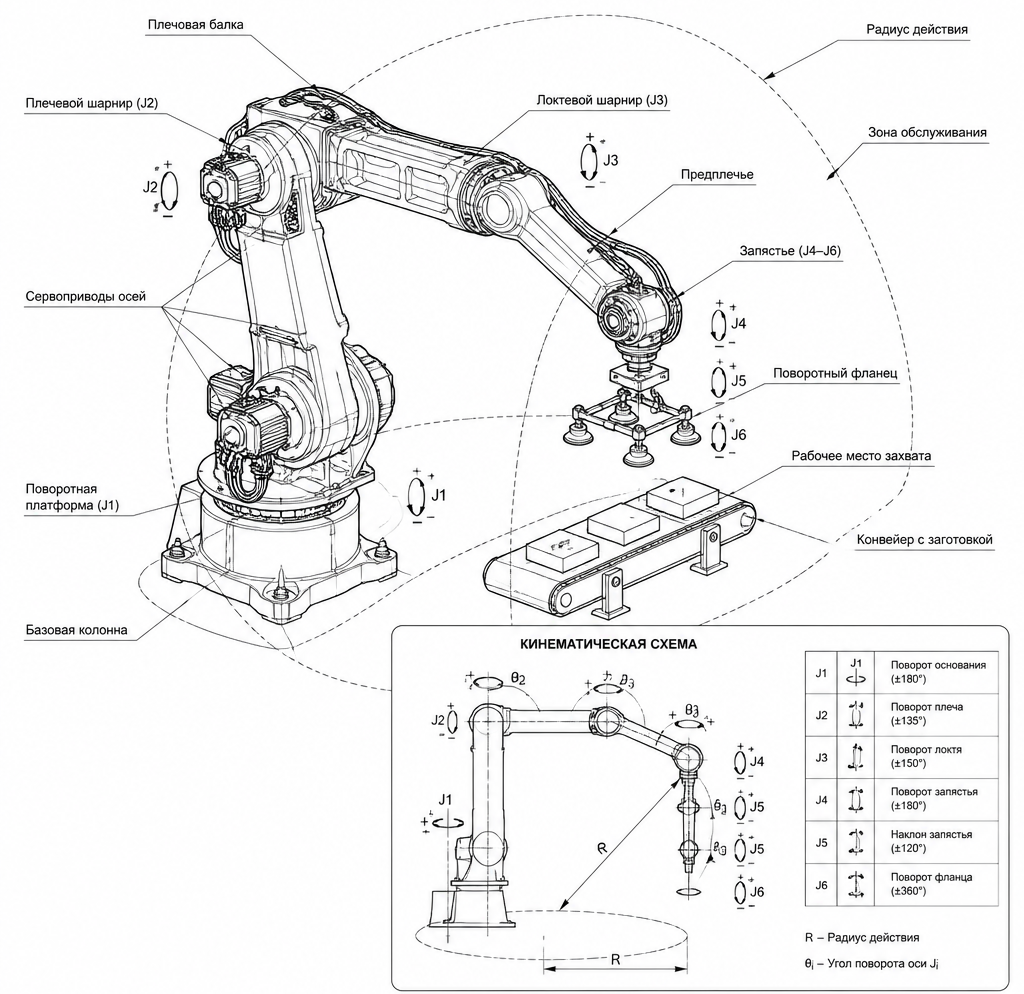
Кинематическая схема шарнирных роботов
Главный недостаток шарнирного манипулятора - сложность программирования и управления. Обратная кинематика шестизвенной системы имеет несколько решений для каждого положения инструмента, а прохождение через сингулярные конфигурации требует особых алгоритмических мер предосторожности.
У шестиосевого манипулятора различают три типа сингулярностей: запястную - когда оси четвёртого и шестого суставов совпадают; плечевую - когда центр запястья выходит на ось первого сустава; и локтевую - когда рука полностью вытянута и центр запястья лежит в плоскости осей второго и третьего суставов. В каждом из этих положений один из суставов теоретически требует бесконечно большой угловой скорости, что на практике приводит либо к остановке с ошибкой, либо к рывку.
Современные системы управления решают эту проблему численными методами - в частности, методом Ньютона-Рафсона и его модификациями - а перспективные разработки используют машинное обучение для ускорения решения в реальном времени.
Параллельно развивается инструментарий офлайн-программирования: оператор составляет программу в виртуальной модели ячейки, автоматически проверяет её на отсутствие сингулярностей и коллизий, а затем загружает уже готовый файл в контроллер - без остановки производства.
Традиционный альтернативный способ - обучение через пульт teach pendant - по-прежнему широко применяется для простых задач, однако исследования фиксируют его как трудоёмкий и медленный при большом числе позиций.
Дельта-робот: параллельная кинематика
Дельта-робот устроен принципиально иначе, чем любой последовательный манипулятор. Три рычага-параллелограмма закреплены на неподвижном треугольном основании и сходятся к единой подвижной платформе с инструментом. Именно это основание, по форме напоминающее греческую букву «дельта», дало машине имя.
Ключевое свойство параллелограммов в конструкции состоит в сохранении пространственной ориентации инструмента: он всегда остаётся параллельным основанию вне зависимости от положения платформы.
Параллельная кинематика означает, что нагрузка распределяется между тремя цепями одновременно, а все приводы закреплены на неподвижном основании. Это резко снижает инерцию движущихся частей и повышает жёсткость конструкции. Следствие - исключительная скорость: дельта-роботы способны совершать сотни рабочих циклов в минуту, что делает их незаменимыми в высокоскоростной сортировке, комплектации и упаковке в пищевой и фармацевтической промышленности.
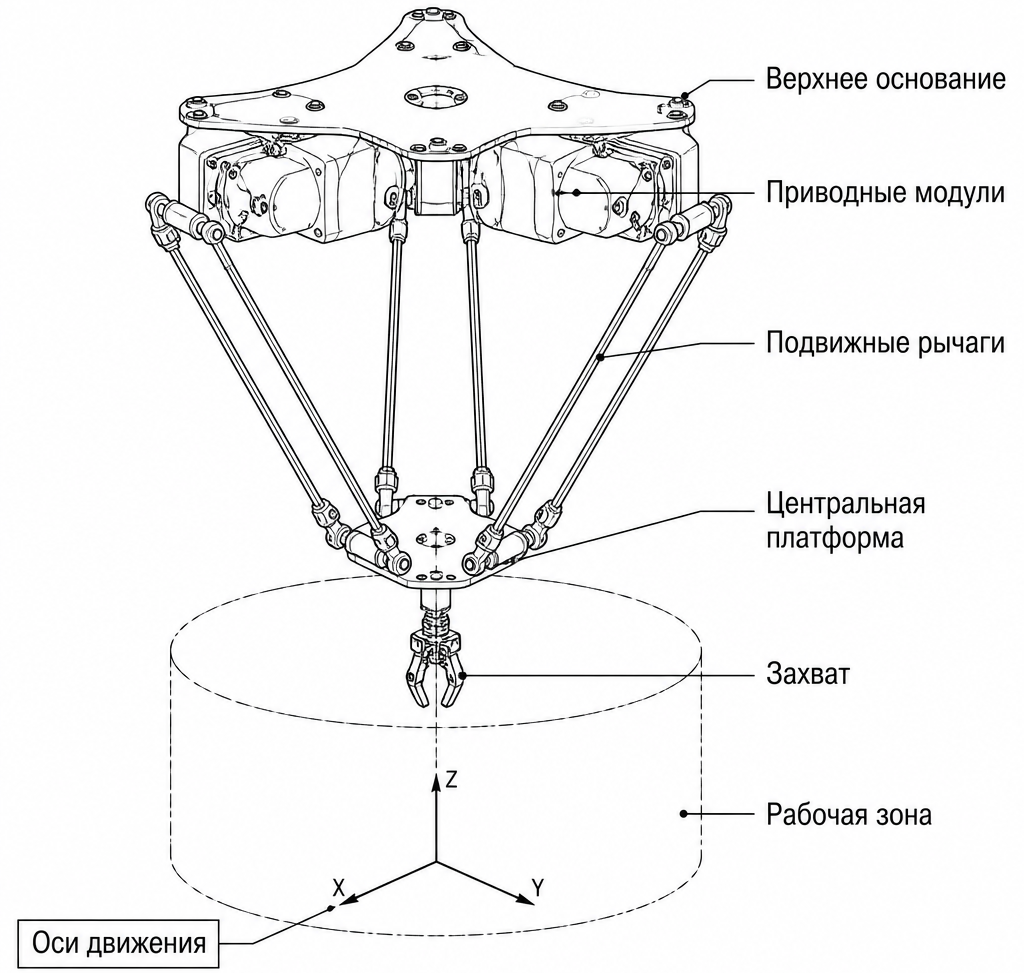
Конструкция робота DELTA
Базовая трёхосевая версия перемещает инструмент параллельными переносами, тогда как четырёх- и шестиосевые модификации получают дополнительное вращение инструмента и способны захватывать объекты с разных сторон и переворачивать их. Рабочая зона ограничена куполообразным объёмом под основанием, а грузоподъёмность невелика - такова плата за скорость.
Именно малая инерция подвижных звеньев позволяет дельта-роботу разгоняться до ускорений порядка десятков метров в секунду в квадрате и выполнять до 300 циклов в минуту.
Промышленные образцы, например серия KUKA KR DELTA, завершают один цикл за 0,32 секунды при полезной нагрузке до 6 кг, а диаметр рабочей зоны составляет от 700 до 1300 мм в зависимости от длины штанг.
Когда задача требует ориентирования детали в двух плоскостях, к параллельным штангам добавляют кинематические цепи UPU, передающие крутящий момент от неподвижных двигателей на запястье - это и даёт пятую и шестую степени свободы без увеличения массы подвижной части.
Аббревиатура UPU описывает тип кинематической цепи по составу её шарниров: U - универсальный шарнир (карданный), P - поступательная пара (призматическое соединение, телескопическая штанга), U - снова универсальный шарнир. Цепь UPU - это штанга переменной длины, зажатая между двумя карданными шарнирами.
В базовом дельта-роботе три привода перемещают платформу в пространстве, но не вращают её - инструмент всегда сохраняет одну ориентацию. Когда задача требует поворота захвата, к конструкции добавляют одну или две цепи UPU. Их задача - передать крутящий момент от неподвижного двигателя на основании к подвижной платформе, не мешая трём основным степеням свободы. Двигатель при этом остаётся зафиксированным, вся передача момента идёт через штангу с карданами - масса подвижной части не растёт.
SCARA: жёсткость там, где нужно
Аббревиатура SCARA расшифровывается как Selective Compliance Articulated Robot Arm и точно описывает конструктивный принцип: избирательная податливость.
Два горизонтальных вращательных сустава работают в одной плоскости, формируя кинематику, схожую с движением человеческой руки по поверхности стола. Четвёртая ось - вертикальная линейная - опускает и поднимает инструмент. По оси Z конструкция жёсткая и не прогибается под нагрузкой, зато в горизонтальной плоскости свободно маневрирует.
Это делает SCARA идеальным инструментом для операций запрессовки: робот уверенно вставляет деталь в посадочное гнездо, не уходя в сторону, но при этом способен «поддаться» в плоскости при небольшом несовпадении осей - что исключает поломки при лёгком рассогласовании позиций.
Все четыре привода относительно тяжёлые, зато расположены ближе к основанию, что снижает инерцию подвижных звеньев и обеспечивает типичное время цикла 0,29-0,38 с. Максимальная линейная скорость перемещения у большинства промышленных моделей составляет 1-2 м/с, а у скоростных версий для лёгких нагрузок - до 8-10 м/с.
Электронная сборка, пайка, тестирование плат, дозирование клея - типичная среда обитания SCARA на современном заводе.
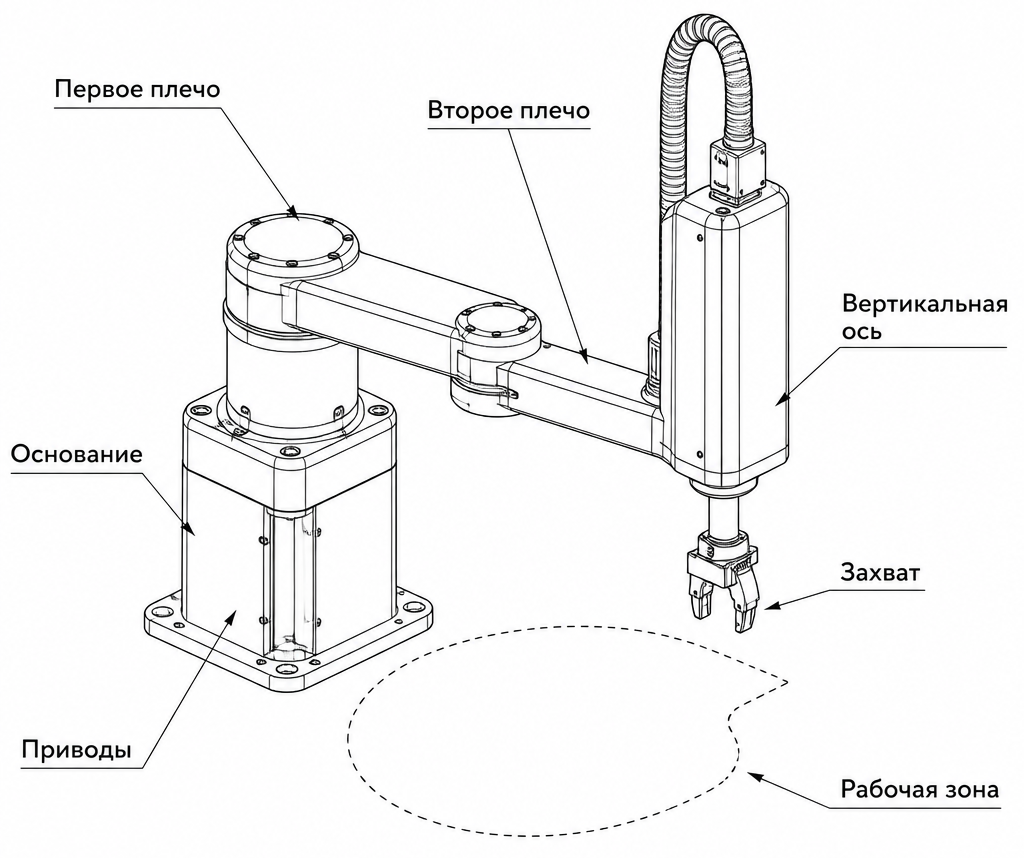
Конструкция робота SCARA
Роботы этого типа работают быстрее декартовых при плоских операциях и компактнее шарнирных, хотя и обходятся дороже. Важная конструктивная особенность - способность складывать «руку» в компактное положение, что удобно при работе в тесных производственных ячейках.
Грузоподъёмность серийных SCARA лежит в диапазоне от 3 до 20 кг, что существенно превышает возможности дельта-роботов. Лёгкие варианты до 5-6 кг нашли применение в микроэлектронике и медицинской диагностике, средние модели до 12 кг - в приборостроении, а тяжёлые версии работают с крупными узлами на автомобильных конвейерах.
Помимо pick & place, достаточная грузоподъёмность и вертикальная жёсткость открыли SCARA нишу лёгких ЧПУ-операций - гравировки и обработки мягких материалов.
Декартов и портальный роботы
Декартов, или картезианский, робот представляет собой, пожалуй, простейшую кинематическую схему из всех. Три взаимно перпендикулярные линейные оси X, Y и Z образуют прямоугольную рабочую зону, а перемещение инструмента в любую её точку описывается несложными тригонометрическими функциями без необходимости решать нелинейные уравнения.
Это делает программирование прозрачным, а точность - высокой: она достигает 0,1 мм при перемещении тяжёлых грузов на расстояние более четырёх метров. Открытые направляющие подвержены загрязнению, что требует защитных мер и регулярного обслуживания.
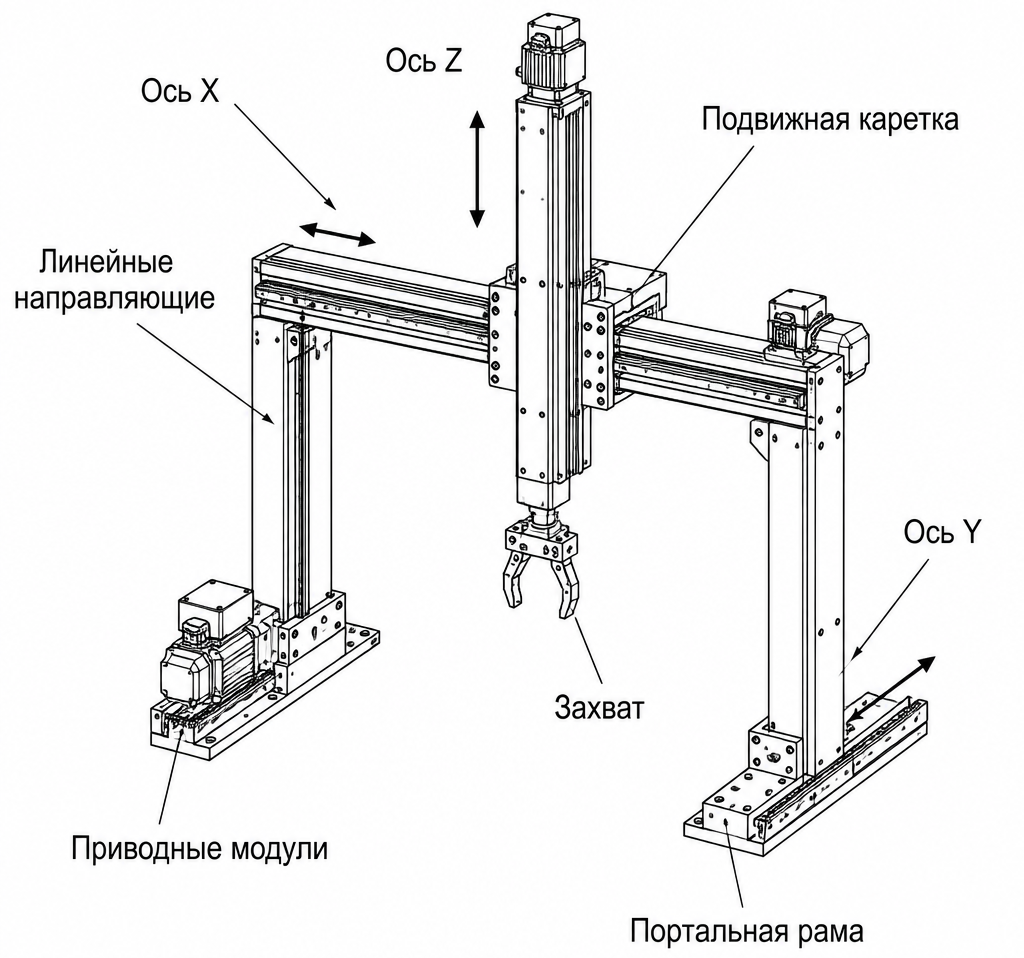
Конструкция портального робота
Если горизонтальная балка опирается на две стойки с обоих концов, получается портальный, или гантри, робот. Такая конструкция перекрывает огромные площади и способна работать с грузами, которые недоступны напольным манипуляторам.
Грузоподъёмность портальных систем охватывает диапазон от нескольких десятков до тысяч килограммов. Тяжёлые версии, например серия Liebherr с телескопическими осями, сохраняют ту же жёсткость и точность, что и классические конструкции, но при вдвое меньшей длине оси. На другом конце шкалы находятся компактные четырёхосевые гантри с полезной нагрузкой 40 кг и производительностью до 600 циклов в час.
Главный недостаток конструкции - металлоёмкость и стоимость монтажа: колонны и балки должны выдерживать и статическую нагрузку от собственной массы, и динамические удары при разгоне тяжёлых кареток. Поэтому рабочую зону портального робота с самого начала проектируют под конкретный технологический процесс - наращивать её после монтажа значительно сложнее, чем у напольного манипулятора.
Логистика, паллетирование, крупногабаритная сварка и механическая обработка - вот области, где портальный робот не имеет конкурентов по соотношению размера рабочей зоны и грузоподъёмности.
Цилиндрический робот
Цилиндрический робот сочетает одно вращательное сочленение у основания с двумя линейными - радиальным и вертикальным. Основание поворачивается, задавая угловую координату, «рука» выдвигается, задавая радиус, а вертикальная ось определяет высоту - итогом служит рабочая зона в форме полого цилиндра.
Конструкция занимает мало места при установке и способна работать в труднодоступных местах: углублениях, каналах, внутри технологического оборудования. Стройная колонна с горизонтальной штангой механически значительно проще шарнирного манипулятора: меньше кинематических пар, меньше редукторов и датчиков положения. Это снижает стоимость изготовления и упрощает техническое обслуживание - замену изношенных направляющих или приводных ремней можно выполнить без специализированного сервиса.
Полезная нагрузка цилиндрических роботов, как правило, ограничена несколькими килограммами, а скорость перемещения инструмента составляет около 1000 мм/с - на порядок ниже, чем у дельта-роботов. Причина кроется в физике: вращающаяся колонна при больших скоростях создаёт угловые ускорения, которые при выдвинутой «руке» складываются в значительные центробежные нагрузки, деформирующие линейные направляющие и ускоряющие их износ.
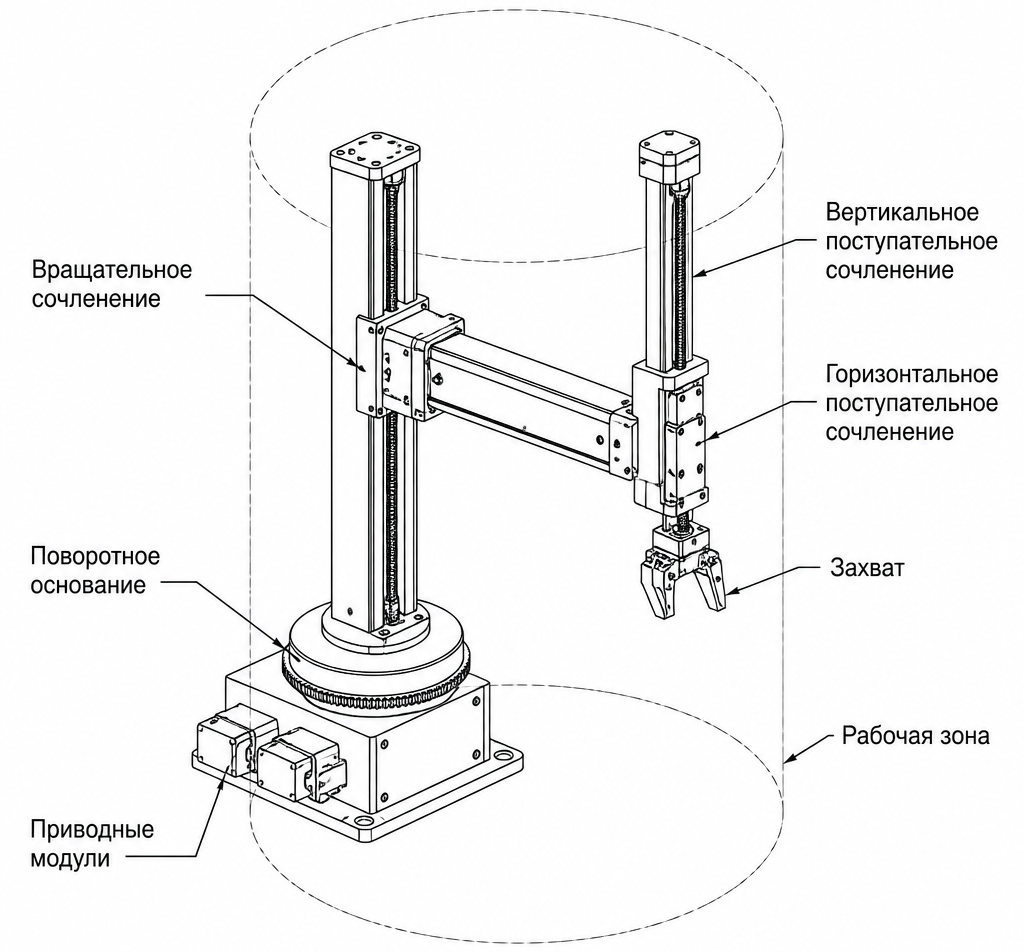
Конструкция цилиндрического робота
Ограничения существенны: точность и повторяемость ниже, чем у шарнирных и декартовых машин, а принципиальная неспособность вращать захватываемый объект сужает круг задач до перемещения деталей из плоскости в плоскость. Основные области применения - загрузка и выгрузка станков, точечная сварка труб и несложная сборка, а также паллетирование, дозирование и упаковка в фармацевтической и пищевой промышленности. Именно там требования к точности невысоки, детали лёгкие, а главным критерием выбора становится не скорость цикла, а надёжность и минимальные затраты на владение.
Сферический (полярный) робот
Сферический робот добавляет к конструкции цилиндрического ещё одно вращение - наклон «плеча», - и рабочая зона принимает форму части сферы. Это первый тип промышленных роботов, нашедший широкое применение в производстве: сферические манипуляторы использовались для сварки, перемещения деталей и загрузки машин ещё на заре промышленной роботизации.
Большой радиус досягаемости при компактных габаритах основания - главное достоинство такой схемы. Точность позиционирования при этом сопоставима с цилиндрическими роботами и уступает шарнирным и декартовым конструкциям.
Конструкция сферического робота
Именно сферическую кинематику имел Unimate - первый серийный промышленный робот, разработанный Джорджем Девол и Джозефом Энгельбергером и установленный в 1961 году на заводе General Motors в Трентоне, штат Нью-Джерси.
Гидравлический манипулятор весом около 1800 кг извлекал раскалённые отливки из машин литья под давлением и укладывал их в стопы - задачу опасную для рабочих из-за выхлопных газов и риска травм.
Программа хранилась на магнитном барабане в виде последовательности угловых координат суставов, воспроизводимых при каждом рабочем цикле, а точность повторного позиционирования составляла около 1,25 мм.
Сферические роботы сохраняли популярность примерно до середины 1980-х годов, пока шарнирные конструкции с электроприводами не вытеснили их благодаря более широкой рабочей зоне и лучшей точности.
Сегодня классическая сферическая схема RRL (два вращения и одно линейное звено) практически не встречается в новых промышленных разработках. Её историческое значение тем не менее велико: именно на Unimate производители и инженеры впервые убедились в экономической целесообразности роботизации и сформулировали требования, которые определили облик всех последующих поколений промышленных манипуляторов.
Кинематика и динамика: почему нельзя рассматривать отдельно
Описание движения было бы неполным без учёта динамики. При быстром перемещении звеньев возникают инерционные силы, способные вызвать вибрации и снизить точность позиционирования - особенно у шарнирных роботов с большими плечами рычагов.
Современные системы управления используют модели динамического предсказания, рассчитывающие управляющие воздействия с учётом масс и инерционных характеристик каждого звена в реальном времени.
Дополнительным инструментом становятся цифровые двойники - виртуальные модели роботов, позволяющие тестировать кинематику и динамику ещё до физического запуска машины.Ниже приведено сравнение основных типов по ключевым характеристикам
|
Тип робота |
Степени свободы |
Рабочая зона |
Точность |
Скорость |
Типичное применение |
|
Шарнирный (6-осевой) |
6 |
Сложная, большая |
Высокая |
Средняя |
Сварка, покраска, сборка |
|
Дельта |
3-6 |
Купол |
Высокая |
Очень высокая |
Сортировка, упаковка |
|
SCARA |
4 |
Горизонтальная плоскость |
Очень высокая |
Высокая |
Электронная сборка, запрессовка |
|
Декартов / Портальный |
3 |
Прямоугольник / Большая площадь |
Очень высокая |
Средняя |
Резка, паллетирование, логистика |
|
Цилиндрический |
3 |
Цилиндр |
Средняя |
Средняя |
Загрузка станков, сварка труб |
|
Сферический |
3 |
Сфера |
Средняя |
Средняя |
Перемещение деталей, литьё |
Почему кинематика это стратегический выбор
Выбор кинематической схемы - не технический вопрос второго плана, а фундаментальное проектное решение, определяющее производительность линии, стоимость владения и гибкость при смене номенклатуры продукции.
Шестиосевой манипулятор универсален, но требует решения сложных уравнений обратной кинематики в реальном времени. Декартов робот прост и точен, но жёстко привязан к прямоугольной зоне. Дельта работает молниеносно, однако лишь в ограниченном куполообразном пространстве. SCARA - мастер плоскостных операций, но не способен работать в произвольно ориентированном пространстве.
Именно это многообразие схем делает промышленную робототехнику такой ёмкой областью инженерии: здесь нет универсального ответа, зато есть правильный инструмент для каждой задачи - и кинематика служит ключом к его выбору.
Повный А. В., преподаватель Филиала Белорусский государственный технологический университет «Гомельский государственный политехнический колледж»