

 По принципу регулирования все системы автоматического регулирования подразделяются на четыре класса.
По принципу регулирования все системы автоматического регулирования подразделяются на четыре класса.
1. Система автоматической стабилизации - система, в которой регулятор поддерживает постоянным заданное значение регулируемого параметра.
2. Система программного регулирования - система, обеспечивающая изменение регулируемого параметра по заранее заданному закону (во времени).
3. Следящая система - система, обеспечивающая изменение регулируемого параметра в зависимости от какой-либо другой величины.
4. Система экстремального регулирования - система, в которой регулятор поддерживает оптимальное для изменяющихся условий значение регулируемой величины.
Для регулирования температурного режима электронагревательных установок применяются в основном системы двух первых классов.
Системы автоматического регулирования температуры по роду действия можно разделить на две группы: прерывистого и непрерывного регулирования.
Автоматические регуляторы систем автоматического регулирования (САР) по функциональным особенностям разделены на пять типов: позиционные (релейные), пропорциональные (статические), интегральные (астатические), изодромные (пропорционально-интегральные), изодромные с предварением и с первой производной.
Позиционные регуляторы относятся к прерывистым САР, а остальные типы регуляторов - к САР непрерывного действия. Ниже рассмотрены основные особенности позиционных, пропорциональных, интегральных и изодромных регуляторов, имеющих наибольшее применение в системах автоматического регулирования температуры.
Функциональная схема автоматического регулирования температуры (рис. 1) состоит из объекта регулирования 1, датчика температуры 2, программного устройства или задатчика уровня температуры 4, регулятора 5 и исполнительного устройства 8. Во многих случаях между датчиком и программным устройством ставится первичный усилитель 3, а между регулятором и исполнительным устройством - вторичный усилитель 6. Дополнительный датчик 7 применяется в изодромных системах регулирования.
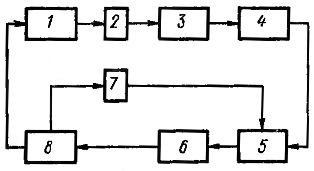
Рис. 1. Функциональная схема автоматического регулирования температуры
В качестве датчиков температуры применяются термопары, термосопротивления (термисторы) и термометры сопротивления. Наиболее часто используются термопары. Более подробно про них смотрите здесь: Термоэлектрические преобразователи (термопары)
Позиционные (релейные) регуляторы температуры
Позиционными называют такие регуляторы, у которых регулирующий орган может занимать два или три определенных положения. В электронагревательных установках применяются двух- и трехпозиционные регуляторы. Они просты и надежны в эксплуатации.
На рис. 2 показана принципиальная схема двухпозиционного регулирования температуры воздуха.
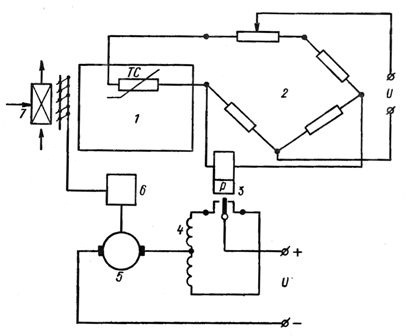
Рис. 2. Принципиальная схема двухпозиционного регулирования температуры воздуха: 1 - объект регулирования, 2 - измерительный мост, 3 - поляризованное реле, 4 - обмотки возбуждения электродвигателя, 5 - якорь электродвигателя, 6 - редуктор, 7 - калориф.
Для контроля температуры в объекте регулирования служит термосопротивление ТС, включенное в одно из плеч измерительного моста 2. Величины сопротивлений моста подбираются таким образом, чтобы при заданной температуре мост был уравновешен, то есть напряжение в диагонали моста равнялось нулю. При повышении температуры поляризованное реле 3, включенное в диагональ измерительного моста, включает одну из обмоток 4 электродвигателя постоянного тока, который с помощью редуктора 6 закрывает воздушный клапан перед калорифером 7. При понижении температуры воздушный клапан полностью открывается.
При двухпозиционном регулировании температуры количество подаваемого тепла может устанавливаться только на двух уровнях - максимальном и минимальном. Максимальное количество тепла должно быть больше необходимого для поддержания заданной регулируемой температуры, а минимальное - меньше. В этом случае температура воздуха колеблется около заданного значения, то есть устанавливается так называемый автоколебательный режим (рис. 3, а).
Линии, соответствующие температурам τн и τв, определяют нижнюю и верхнюю границы зоны нечувствительности. Когда температура регулируемого объекта, уменьшаясь, достигает значения τн количество подаваемого тепла мгновенно увеличивается и температура объекта начинает возрастать. Достигнув значения τв, регулятор уменьшает подачу тепла, и температура понижается.
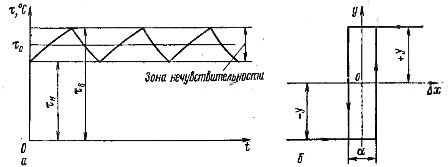
Рис. 3. Временная характеристика двухпозиционного регулирования (а) и статическая характеристика двухпозиционного регулятора (б).
Скорость повышения и понижения температуры зависит от свойств объекта регулирования и от его временной характеристики (кривой разгона). Колебания температуры не выходят за границы зоны нечувствительности, если изменения подачи тепла сразу вызывают изменения температуры, то есть если отсутствует запаздывание регулируемого объекта.
С уменьшением зоны нечувствительности амплитуда колебаний температуры уменьшается вплоть до нуля при τн = τв. Однако для этого требуется, чтобы подача тепла изменялась с бесконечно большой частотой, что практически осуществить чрезвычайно трудно. Во всех реальных объектах регулирования имеется запаздывание. Процесс регулирования в них протекает примерно так.
При понижении температуры объекта регулирования до значения τн мгновенно изменяется подача тепла, однако из-за запаздывания температура некоторое время продолжает снижаться. Затем она повышается до значения τв, при котором мгновенно уменьшается подача тепла. Температура продолжает еще некоторое время повышаться, затем из-за уменьшенной подачи тепла температура понижается, и процесс повторяется вновь.
На рис. 3, б приведена статическая характеристика двухпозиционного регулятора. Из нее следует, что регулирующее воздействие на объект может принимать только два значения: максимальное и минимальное. В рассмотренном примере максимум соответствует положению, при котором воздушный клапан (см. рис. 2) полностью открыт, минимум - при закрытом клапане.
Знак регулирующего воздействия определяется знаком отклонения регулируемой величины (температуры) от ее заданного значения. Величина регулирующего воздействия постоянна. Все двухпозиционные регуляторы обладают гистерезисной зоной α, которая возникает из-за разности токов срабатывания и отпускания электромагнитного реле.
Пример использования двухпозиционного регулирования температуры: Автоматическое регулирование температуры в печах нагрева сопротивлением
Пропорциональные (статические) регуляторы температуры
В тех случаях, когда необходима высокая точность регулирования или когда недопустим автоколебательный процесс, применяют регуляторы с непрерывным процессом регулирования. К ним относятся пропорциональные регуляторы (П-регуляторы), пригодные для регулирования самых разнообразных технологических процессов.
В тех случаях, когда необходима высокая точность регулирования или когда недопустим автоколебательный процесс, применяют регуляторы с непрерывным процессом регулирования. К ним относятся пропорциональные регуляторы (П-регуляторы), пригодные для регулирования самых разнообразных технологических процессов.
В системах автоматического регулирования с П-регуляторами положение регулирующего органа (у) прямо пропорционально значению регулируемого параметра (х):
y=k1х,
где k1 - коэффициент пропорциональности (коэффициент усиления регулятора).
Эта пропорциональность имеет место, пока регулирующий орган не достигнет своих крайних положений (конечных выключателей).
Скорость перемещения регулирующего органа прямо пропорциональна скорости изменения регулируемого параметра.
На рис. 4 показана принципиальная схема системы автоматического регулирования температуры воздуха в помещении при помощи пропорционального регулятора. Температура в помещении измеряется термометром сопротивления ТС, включенным в схему измерительного моста 1.
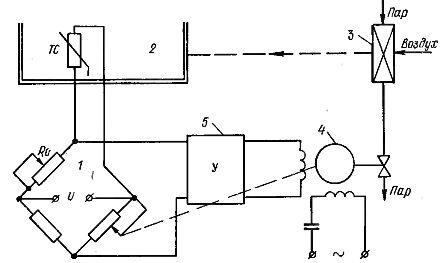
Рис. 4. Схема пропорционального регулирования температуры воздуха: 1 - измерительный мост, 2 - объект регулирования, 3 - теплообменник, 4 - конденсаторный двигатель, 5 - фазочувствительный усилитель.
При заданной температуре мост уравновешен. При отклонении регулируемой температуры от заданного значения в диагонали моста возникает напряжение разбаланса, величина и знак которого зависят от величины и знака отклонения температуры. Это напряжение усиливается фазочувствительным усилителем 5, на выходе которого включена обмотка двухфазного конденсаторного двигателя 4 исполнительного механизма.
Исполнительный механизм перемещает регулирующий орган, изменяя поступление теплоносителя в теплообменник 3. Одновременно с перемещением регулирующего органа происходит изменение сопротивления одного из плеч измерительного моста, в результате этого изменяется температура, при которой уравновешивается мост.
Таким образом, каждому положению регулирующего органа из-за жесткой обратной связи соответствует свое равновесное значение регулируемой температуры.
Для пропорционального (статического) регулятора характерна остаточная неравномерность регулирования.
В случае скачкообразного отклонения нагрузки от заданного значения (в момент t1) регулируемый параметр придет по истечении некоторого отрезка времени (момент t2) к новому установившемуся значению (рис. 4). Однако это возможно только при новом положении регулирующего органа, то есть при новом значении регулируемого параметра, отличающегося от заданного на величину δ.
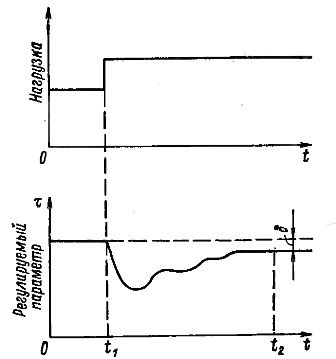
Рис. 5. Временные характеристики пропорционального регулирования
Недостаток пропорциональных регуляторов состоит в том, что каждому значению параметра соответствует только одно определенное положение регулирующего органа. Для поддержания заданного значения параметра (температуры) при изменении нагрузки (расхода тепла) необходимо, чтобы регулирующий орган занял другое положение, соответствующее новому значению нагрузки. В пропорциональном регуляторе этого не происходит, вследствие чего возникает остаточное отклонение регулируемого параметра.
Интегральные (астатические регуляторы)
Интегральными (астатическими) называются такие регуляторы, в которых при отклонении параметра от заданного значения регулирующий орган перемещается более или менее медленно и все время в одном направлении (в пределах рабочего хода) до тех пор, пока параметр снова не примет заданного значения. Направление хода регулирующего органа изменяется лишь тогда, когда параметр переходит через заданное значение.
В интегральных регуляторах электрического действия обычно искусственно создается зона нечувствительности, в пределах которой изменение параметра не вызывает перемещений регулирующего органа.
Скорость перемещения регулирующего органа в интегральном регуляторе может быть постоянной и переменной. Особенностью интегрального регулятора является отсутствие пропорциональной связи между установившимися значениями регулируемого параметра и положением регулирующего органа.
На рис. 6 приведена принципиальная схема системы автоматического регулирования температуры при помощи интегрального регулятора. В ней в отличие от схемы пропорционального регулирования температуры (см. рис. 4) нет жесткой обратной связи.
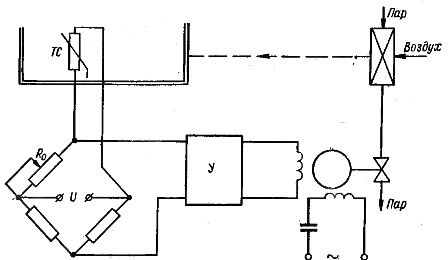
Рис. 6. Схема интегрального регулирования температуры воздуха
В интегральном регуляторе скорость регулирующего органа прямо пропорциональна величине отклонения регулируемого параметра.
Процесс интегрального регулирования температуры при скачкообразном изменении нагрузки (расхода тепла) отображен на рис. 7 с помощью временных характеристик. Как видно из графика, регулируемый параметр при интегральном регулировании медленно возвращается к заданному значению.
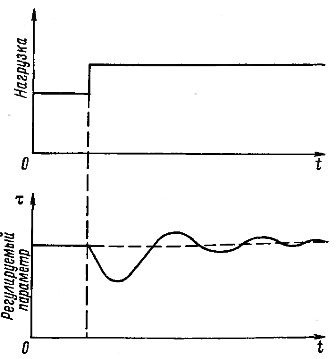
Рис. 7. Временные характеристики интегрального регулирования
Изодромные (пропорционально-интегральные) регуляторы
Изодромное регулирование обладает свойствами как пропорционального, так и интегрального регулирования. Скорость перемещения регулирующего органа зависит от величины и скорости отклонения регулируемого параметра.
При отклонении регулируемого параметра от заданного значения регулирование осуществляется следующим образом. Вначале регулирующий орган перемещается в зависимости от величины отклонения регулируемого параметра, то есть имеет место пропорциональное регулирование. Затем регулирующий орган совершает дополнительное перемещение, которое необходимо для устранения остаточной неравномерности (интегральное регулирование).
Изодромную систему регулирования температуры воздуха (рис. 8) можно получить заменой жесткой обратной связи в схеме пропорционального регулирования (см. рис. 5) упругой обратной связью (от регулирующего органа к движку сопротивления обратной связи). Электрическая обратная связь в изодромной системе осуществляется потенциометром и вводится в систему регулирования через контур, содержащий сопротивление R и емкость С.
В течение переходных процессов сигнал обратной связи вместе с сигналом отклонения параметра воздействует на последующие элементы системы (усилитель, электродвигатель). При неподвижном регулирующем органе, в каком бы положении он ни находился, по мере заряда конденсатора С сигнал обратной связи затухает (в установившемся режиме он равен нулю).
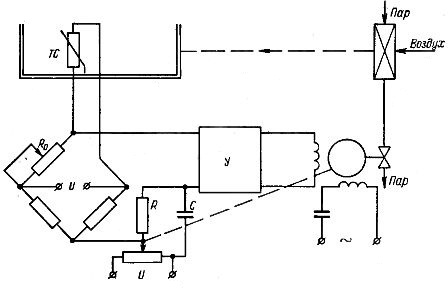
Рис. 8. Схема изодромного регулирования температуры воздуха
Для изодромного регулирования характерно, что неравномерность регулирования (относительная ошибка) с увеличением времени уменьшается, приближаясь к нулю. При этом обратная связь не будет вызывать остаточных отклонений регулируемой величины.
Таким образом, изодромное регулирование приводит к значительно лучшим результатам, чем пропорциональное или интегральное (не говоря уже о позиционном регулировании). Пропорциональное регулирование в связи с наличием жесткой обратной связи происходит практически мгновенно, изодромное - замедленно.
Программные системы автоматического регулирования температуры
Для осуществления программного регулирования необходимо непрерывно воздействовать на настройку (уставку) регулятора так, чтобы регулируемая величина изменялась по заранее заданному закону. С этой целью узел настройки регулятора снабжается программным элементом. Это устройство служащее для установления закона изменения задаваемой величины.
При электронагреве исполнительный механизм САР может воздействовать на включение или отключение секций электронагревательных элементов, изменяя тем самым температуру нагреваемой установки в соответствии с заданной программой. Программное регулирование температуры и влажности воздуха широко применяется в установках искусственного климата.