

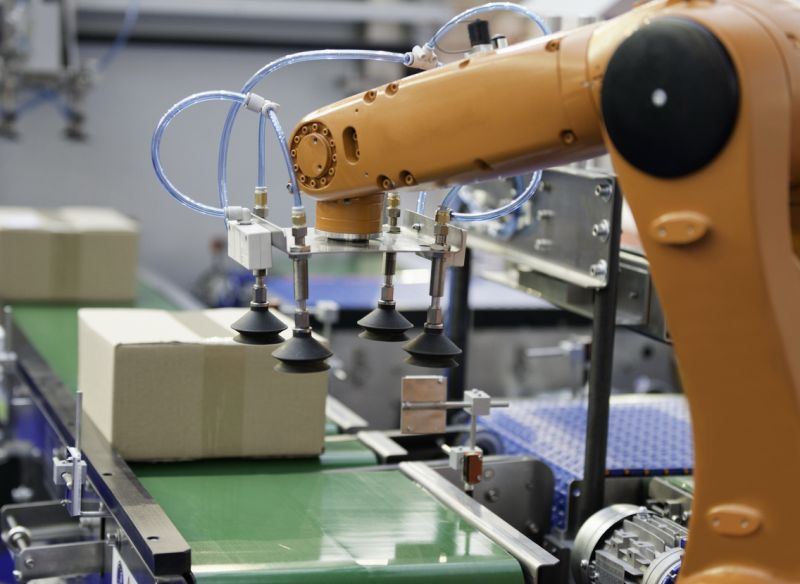
Промышленным роботом называется автоматическая манипуляционная машина, применяемая в производственных процессах, и предназначенная для выполнения двигательных и управляющих действий (смотрите - Применение промышленных роботов в своременном производстве).
Сегодня промышленные роботы совершенно разных видов успешно служат в очень многих отраслях производств как для простого перемещения предметов, так и для выполнения сложных технологических операций, практически заменяя человека во многих сферах, особенно в тех, где требуется высокая точность и качество выполняемой работы, большое количество однообразных операций, крупный объем и т.д.
В связи с огромностью поля промышленной деятельности, существует колоссальное количество разнообразных роботов, которые отличаются друг от друга назначением, конструкцией, техническими характеристиками, сферами применения и т. д.
Однако, независимо от своего вида, любой промышленный робот в обязательном порядке включает в себя манипулятор и программируемый блок управления, который фактически и задает все необходимые движения и управляющие воздействия исполнительных органов. Давайте же рассмотрим стандартную классификацию промышленных роботов.
Характер выполняемых работ
-
Производственные — осуществляющие производственные операции: сварка, покраска, гибка, сборка, резка, сверление и т.д.
-
Вспомогательные — осуществляющие подъемные и транспортные функции: установка, снятие, укладывание, погрузка, разгрузка и т. д.
-
Универсальные — осуществляющие и те и другие виды функций.

Грузоподъемность
Грузоподъемность промышленного робота определяется как максимальная масса объекта производства, которую робот в состоянии гарантированно захватить и удержать, не снижая при этом своих эксплуатационных характеристик. Так, по грузоподъемности промышленные роботы подразделяются на:
-
Сверхтяжелые — с номинальной грузоподъемностью более 1000 кг.
-
Тажелые — с номинальной грузоподъемностью от 200 до 1000 кг.
-
Средние — с номинальной грузоподъемностью от 10 до 200 кг.
-
Легкие — с номинальной грузоподъемностью от 1 до 10 кг.
-
Сверхлегкие — с номинальной грузоподъемностью до 1 кг.
По способу установки промышленные роботы бывают:
-
Встроенные — предназначенные для обслуживания одного станка;
-
Напольные и подвесные - более универсальны, способны к большим перемещениям, могут работать одновременно с несколькими станками, например менять сверла, позиционировать заготовки и т. д.

Подвижность или стационарность
Промышленные роботы бывают подвижными и стационарными. Подвижные способны к транспортирующим, ориентирующим и координатным перемещениям, а стационарные — только к транспортирующим и ориентирующим перемещениям.
Зона обслуживания
Зоной обслуживания промышленного робота называется рабочее пространство робота, в котором исполнительный орган (манипулятор) способен выполнять свои функции по назначению без ухудшения установленных характеристик.
Рабочая зона
Рабочей зоной промышленного робота называется пространство определенной площади, в котором манипулятор может выполнять работу без нарушения установленных характеристик. Рабочая зона определяется как объем пространства, и может составлять для особо точных роботов от 0,01 куб.м, и доходить до 10 куб.м и даже более (для передвижных роботов).

Тип привода
-
Электромеханический;
-
Гидравлический;
-
Пневмотический;
-
Комбинированный.
Вид производства
-
Транспортные работы;
-
Складские работы;
-
Автоматизированный контроль;
-
Сборка;
-
Сварка;
-
Сверление;
-
Литье;
-
Ковка;
-
Термообработка;
-
Покраска;
-
Мытьеи.т.д.

Линейная и угловая скорости
Линейная скорость манипулятора промышленного робота обычно составляет от 0,5 до 1 м/с, а угловая скорость — от 90 до 180 градусов/с.
Тип управления
По способу управления промышленные роботы бывают:
-
С программным управлением (числовым, цикловым);
-
С адаптивным управлением (по позиции, по контуру).
Способ программирования:
-
аналитический — составление программы;
-
обучаемый — оператор выполняет последовательность действий, робот их запоминает.
Вид системы координат
Система координат промышленного робота может быть, в зависимости от назначения:
-
Прямоугольная;
-
Цилиндрическая;
-
Сферическая;
-
Угловая;
-
Комбинированная.
Число степеней подвижности
Числом степеней подвижности промышленного робота называется общее число всех доступных координатных движений, которые может произвести робот с захватываемым предметом относительно неподвижной точки опоры (примеры неподвижных узлов: основание, стойка) без учета хватающего и отпускающего движения зажима. Так, по числу степеней подвижности промышленные роботы подразделяются на:
-
с 2 степенями подвижности;
-
с 3 степенями подвижности;
-
с 4 степенями подвижности;
-
с более 4 степенями подвижности.
Погрешность позиционирования
Погрешностью позиционирования промышленного робота называется допустимое отклонение его манипулятора от положения, задаваемого управляющей программой. В зависимости от характера работ, погрешности позиционирования бывают:
-
Для грубых работ — от +-1 мм до +-5 мм;
-
Для точных работ — от +-0,1 мм до +-1 мм;
-
Для высоко точных работ — до +-0,1 мм.